物理应用基于matlab车辆二自由度悬架鲁棒控制含Matlab源码 2324期
Posted 海神之光
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了物理应用基于matlab车辆二自由度悬架鲁棒控制含Matlab源码 2324期相关的知识,希望对你有一定的参考价值。
⛄一、简介(附论文)
本章考虑用鲁棒控制方法来控制一个简单的二阶机械系统:质量块-阻尼器-弹簧系统。该系统是本科生实验教学中常见的控制实验装置。作为本书中的第一个案例,将针对该装置介绍三种控制器的详细设计方法,分析闭环系统的鲁棒稳定性和鲁棒性能。为了简化设计过程,此处仅考虑模型的结构扰动(参数扰动)。针对此例,介绍了matlab鲁棒控制工具箱(Robust Control Toolbox)一些鲁棒控制器设计指令。希望此章的学习不仅能够教授鲁棒控制系统设计方面的知识,也能够教会大家如何使用鲁棒控制工具箱。
⛄二、部分源代码
%response to the reference
red_mds
sim_mds
K=Kred;
clp=starp(sim_ic,K);
timedata=[0 20 40];
stepdata=[1 0 1];
dist=0;
ref=step_tr(timedata,stepdata,0.1,60);
u=abv(0,0,0,ref,dist);
y=trsp(clp,u,60,0.1);
figure(2)
vplot(sel(y,4,1),‘y-’,ref,‘r–’)
title(‘闭环瞬态响应’)
xlabel(‘t(s)’)
ylabel(‘y(m)’)
%
%response to the disturbance
timedata=[0 20 40];
stepdata=[1 0 1];
dist=step_tr(timedata,stepdata,0.1,60);
ref=0;
u=abv(0,0,0,ref,dist);
y=trsp(clp,u,60,0.1);
figure(3)
vplot(sel(y,4,1),‘y-’,dist,‘r–’)
title(‘扰动瞬态响应’)
xlabel(‘t(secs)’)
ylabel(‘y(m)’)
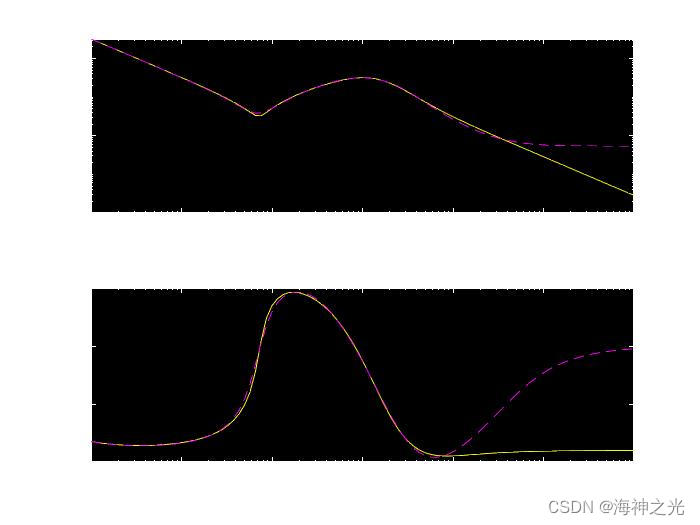
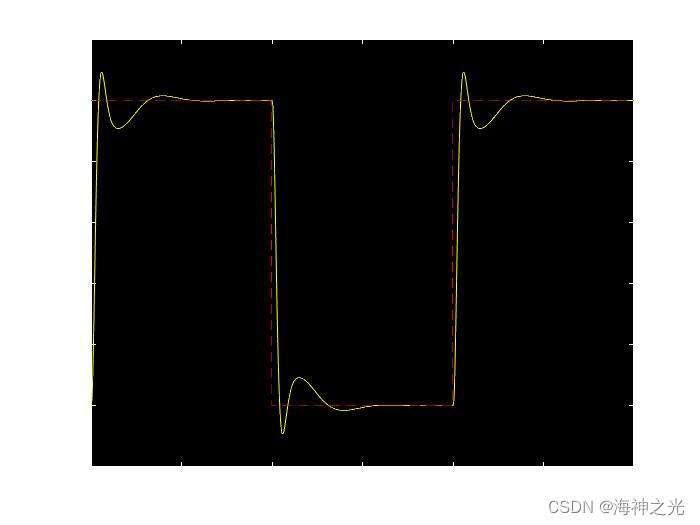
⛄三、运行结果

⛄四、matlab版本及参考文献
1 matlab版本
2014a
2 参考文献
[1] 门云阁.MATLAB物理计算与可视化[M].清华大学出版社,2013.
3 备注
简介此部分摘自互联网,仅供参考,若侵权,联系删除
以上是关于物理应用基于matlab车辆二自由度悬架鲁棒控制含Matlab源码 2324期的主要内容,如果未能解决你的问题,请参考以下文章