常见网络拓扑结构都有哪些?各有啥特点?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了常见网络拓扑结构都有哪些?各有啥特点?相关的知识,希望对你有一定的参考价值。
1.常见网络拓扑结构有哪些?各有什么特点?
2.说明OSI参考模型与TCP/IP参考模型的异同。
3.TCP与UDP之间的主要区别是什么?
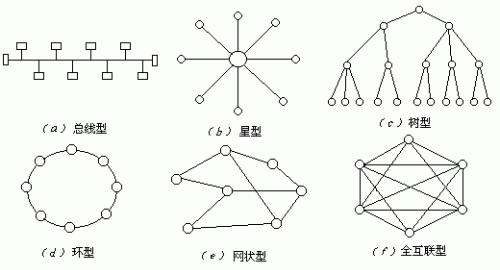
计算机网络的拓扑结构主要有:总线型拓扑、星型拓扑、环型拓扑、树型拓扑和混合型拓扑。
1、网状拓扑结构
优点:任意两个设备间有自己专用的通信通道,不会产生网络冲突,当某个设备发生故障时,不会影响网络中其他设备的通信。
缺点:硬件实现比较困难,需要的电缆多,n个结点的网络至少需要n(n-1)/2条连接电缆,安装成本高,向网络中添加或删除结点都非常困难。
2、星形拓扑结构
优点:硬件安装比较简单成本,向网络中添加或删除结点简便。
缺点:如果中心结点发生故障,整个网络通信将完全瘫痪;另外,由于网络各设备间不能直接通信,需要通过中心结点转发,因此通信时会带来一定的时间延迟。
3、总线型拓扑结构
优点:安装简单,所需要电缆数比星型网络少,可以较方便地在网络中添加或删除结点。
缺点:如果主干电缆发生故障,那么整个网络将瘫痪,并且很难确定出现故障的位置。
4、环形拓扑结构
优点是:环状网络的硬件安装相对简单,发生故障时比较容易确定故障位置。
缺点是:环中任意一个节点发生故障都会导致整个网络瘫痪;虽然比较容易实现在网络添加和删除结点,但添加或删除结点时整个网络不能工作。
5、蜂窝拓扑结构
蜂窝拓扑结构是无线局域网中常用的结构.它以无线传输介质(微波、卫星、红外等)点到点和多点传输为特征,是一种无线网,适用于城市网、校园网、企业网。
参考资料:百度百科-网络拓扑结构
参考技术A网络拓扑结构
1、星形拓扑
星形拓扑是由中央节点和通过点到到通信链路接到中央节点的各个站点组成。
星形拓扑结构具有以下优点:
(1)控制简单。
(2)故障诊断和隔离容易。
(3)方便服务。
星形拓扑结构的缺点:
(1)电缆长度和安装工作量可观。
(2)中央节点的负担较重,形成瓶颈。
(3)各站点的分布处理能力较低。
2、总线拓扑
总线拓扑结构采用一个信道作为传输媒体,所有站点都通过相应的硬件接口直接连到这一公共传输媒体上,该公共传输媒体即称为总线。
总线拓扑结构的优点:
(1)总线结构所需要的电缆数量少。
(2)总线结构简单,又是无源工作,有较高的可靠性。
(3)易于扩充,增加或减少用户比较方便。
总线拓扑的缺点:
(1)总线的传输距离有限,通信范围受到限制。
(2)故障诊断和隔离较困难。
(3)分布式协议不能保证信息的及时传送,不具有实时功能
3、环形拓扑
环形拓扑网络由站点和连接站的链路组成一个闭合环。
环形拓扑的优点:
(1)电缆长度短。
(2)增加或减少工作站时,仅需简单的连接操作。
(3)可使用光纤。
环形拓扑的缺点:
(1)节点的故障会引起全网故障。
(2)故障检测困难。
(3)环形拓扑结构的媒体访问控制协议都采用令牌传达室递的方式,在负载很轻时,信道利用率相对来说就比较低。
4、树形拓扑
树形拓扑从总线拓扑演变而来,形状像一棵倒置的树,顶端是树根,树根以下带分支,每个分支还可再带子分支。
树形拓扑的优点:
(1)易于扩展。
(2)故障隔离较容易。
树形拓扑的缺点:各个节点对根的依赖性太大。
5、网状拓扑结构
网状拓扑结构主要指各节点通过传输线互联连接起来,并且每一个节点至少与其他两个节点相连。
网状拓扑结构的优点:
(1)具有较高的可靠性。
网状拓扑结构的缺点:
(1)结构复杂,实现起来费用较高,不易管理和维护。
(2)不常用于局域网。
参考资料:
百度百科-网络拓扑结构
1、星形拓扑
星形拓扑是由中央节点和通过点到到通信链路接到中央节点的各个站点组成。
星形拓扑结构具有以下优点:
(1)控制简单。
(2)故障诊断和隔离容易。
(3)方便服务。
星形拓扑结构的缺点:
(1)电缆长度和安装工作量可观。
(2)中央节点的负担较重,形成瓶颈。
(3)各站点的分布处理能力较低。 2、总线拓扑
总线拓扑结构采用一个信道作为传输媒体,所有站点都通过相应的硬件接口直接连到这一公共传输媒体上,该公共传输媒体即称为总线。
总线拓扑结构的优点:
(1)总线结构所需要的电缆数量少。
(2)总线结构简单,又是无源工作,有较高的可靠性。
(3)易于扩充,增加或减少用户比较方便。
总线拓扑的缺点:
(1)总线的传输距离有限,通信范围受到限制。
(2)故障诊断和隔离较困难。
(3)分布式协议不能保证信息的及时传送,不具有实时功能
3、环形拓扑
环形拓扑网络由站点和连接站的链路组成一个闭合环。
环形拓扑的优点:
(1)电缆长度短。
(2)增加或减少工作站时,仅需简单的连接操作。
(3)可使用光纤。
环形拓扑的缺点:
(1)节点的故障会引起全网故障。
(2)故障检测困难。
(3)环形拓扑结构的媒体访问控制协议都采用令牌传达室递的方式,在负载很轻时,信道利用率相对来说就比较低。 4、树形拓扑
树形拓扑从总线拓扑演变而来,形状像一棵倒置的树,顶端是树根,树根以下带分支,每个分支还可再带子分支。
树形拓扑的优点:
(1)易于扩展。
(2)故障隔离较容易。
树形拓扑的缺点:各个节点对根的依赖性太大。
给你参考文章
http://learning.sohu.com/upload/itweek03/pl-wangluo.htm
参考资料:http://jsjx.hxu.edu.cn/ctsn/dxjsjjc/kcnr/wlkj/09network/detail/9-2-3.htm本回答被提问者采纳 参考技术C 1、星型结构。
特点:星型拓扑结构便于集中控制,因为端用户之间的通信必须经过中心站。由于这一特点,也带来了易于维护和安全等优点。
端用户设备因为故障而停机时也不会影响其它端用户间的通信。同时星型拓扑结构的网络延迟时间较小,系统的可靠性较高。
2、环型结构。
特点:每个端用户都与两个相临的端用户相连,因而存在着点到点链路,但总是以单向方式操作,于是便有上游端用户和下游端用户之称。
两个节点仅有一条道路,故简化了路径选择的控制;环路上各节点都是自举控制,故控制软件简单;当环中节点过多时,影响信息传输速率,使网络的响应时间延长。
3、总线型结构。
特点:由于各个结点之间通过电缆直接连接,所以总线型拓扑结构中所需要的电缆长度是最小的。
但总线只有一定的负载能力,因此总线长度又有一定限制,一条总线只能连接一定数量的结点。
4、分布式。
特点:网中的路径选择最短路径算法,故网上延迟时间少,传输速率高,但控制复杂。
各个结点间均可以直接建立数据链路,信息流程最短;便于全网范围内的资源共享。缺点为连接线路用电缆长,造价高。
5、树型结构。
特点:是分级的集中控制式网络,与星型相比,它的通信线路总长度短,成本较低,节点易于扩充,寻找路径比较方便。
但除了叶节点及其相连的线路外,任一节点或其相连的线路故障都会使系统受到影响。
6、网状拓扑结构。
特点:网状拓扑结构主要指各节点通过传输线互联连接起来,并且每一个节点至少与其他两个节点相连。网状拓扑结构具有较高的可靠性。
但其结构复杂,实现起来费用较高,不易管理和维护,不常用于局域网。
7、蜂窝拓扑结构。
特点:是无线局域网中常用的结构,它以无线传输介质(微波、卫星、红外等)点到点和多点传输为特征,是一种无线网,适用于城市网、校园网、企业网。
扩展资料
网络拓扑的无线电通信:
传输线系统除同轴电缆、双绞线、和光纤外,还有一种手段是根本不使用导线,这就是无线电通信,无线电通信利用电磁波或光波来传输信息,利用它不用敷设缆线就可以把网络连接起来。
无线电通信包括两个独特的网络:移动网络和无线LAN网络。
利用LAN网,机器可以通过发射机和接收机连接起来;利用移动网,机器可以通过蜂窝式通信系统连接起来,该通信系统由无线电通信部门提供。
网络可采用以太网的结构,物理上由服务器,路由器,工作站,操作终端通过集线器形成星型结构共同构成局域网。
参考资料
百度百科-网络拓扑结构
微型的操作系统都有哪些各有啥特点?
微型操作系统(Micro Operating System,Micro OS)是指占用资源极少、适用于嵌入式设备等小型系统的操作系统。常见的微型操作系统有以下几种:1.Contiki:Contiki是一个开源的、基于C语言的微型操作系统,适用于无线传感器网络和物联网等小型系统。它的特点是占用内存和处理器资源很少,支持IPv6和6LoWPAN等网络协议。
2.TinyOS:TinyOS是另一个适用于嵌入式设备的开源微型操作系统,主要用于无线传感器网络和物联网应用。它的特点是占用资源少,支持事件驱动和组件化编程模型。
3.FreeRTOS:FreeRTOS是一个开源的、用于嵌入式系统的实时操作系统。它的特点是占用资源较少,支持多种处理器架构和编程语言,适用于需要实时性和可靠性的应用。
4.RIOT:RIOT是一个开源的、基于C语言的微型操作系统,适用于物联网和嵌入式设备等小型系统。它的特点是占用资源少,支持多种网络协议和硬件平台。
5.NuttX:NuttX是一个开源的、用于嵌入式系统的实时操作系统,支持多种处理器架构和编程语言。它的特点是占用资源较少,支持可定制的内核配置和可插拔的驱动程序。
这些微型操作系统各自有其特点,可以根据实际应用场景选择最适合的操作系统。 参考技术A 微型操作系统是指占用资源较少、体积小巧的操作系统,通常用于嵌入式设备和物联网等场景。以下是几种常见的微型操作系统及其特点:
1. FreeRTOS
FreeRTOS 是一款开源实时操作系统,适用于多种处理器架构,并且具有高度可移植性。它采用了轻量级任务调度算法,支持多任务并发执行,并提供了完整的内存管理机制。
2. uC/OS-II
uC/OS-II 是一款商业实时操作系统,也可以免费使用非商业目的。它具有高效稳定、易于移植等特点,在工控、汽车电子等领域得到广泛应用。
3. TinyOS
TinyOS 是一个专门为无线传感器网络设计的开源操作系统,主要针对低功耗设备进行优化。它采用基于事件驱动的编程模型,在保证能耗低廉和数据安全性方面表现出色。
4. Contiki OS
Contiki OS 也是一个专门为 IoT 设备设计的开源操作系统,支持 IPv6 网络协议栈和 RPL 路由协议,并且拥有自己独特的 Cooja 模拟器来帮助用户测试代码。
5. RIOT OS
RIOT OS 是另一个适合 IoT 设备使用的开源实时操作系统,支持多个处理器架构和各种网络接口,并且提供了灵活而强大的 API 接口以便用户进行二次开发。
这些微型操作系统都具有不同程度上节省资源、快速启动、可靠稳定等优点,在嵌入式设备和 IoT 领域中得到广泛应用。 参考技术B 微型操作系统是指占用资源较少、体积小巧的操作系统,通常应用于嵌入式设备和物联网等领域。以下是几种常见的微型操作系统及其特点:
1. FreeRTOS:FreeRTOS 是一个开源实时操作系统,具有高度可移植性、低延迟和低功耗等特点,适合于嵌入式设备。
2. Contiki:Contiki 是一个轻量级的开源网络协议栈和操作系统平台,支持 IPv6 和 RPL 等新一代互联网标准,并提供了丰富的网络应用程序接口。
3. TinyOS:TinyOS 是一个专门为无线传感器网络设计的开源操作系统,具有极低的能耗、高效率和灵活性等优势,在智能家居、环境监测等领域得到广泛应用。
4. μC/OS-II:μC/OS-II 是一款商业化实时内核软件产品,可以在多种处理器上运行,并提供了完整而稳定的 API 接口库。
这些微型操作系统都有着不同程度上的优缺点,在选择使用时需要结合具体需求进行评估。 参考技术C 微型操作系统通常是一种轻量级的操作系统,用于嵌入式系统、物联网设备、智能家居等小型设备中。常见的微型操作系统包括Contiki、TinyOS、FreeRTOS、Riot等。这些操作系统都具有以下特点:
1. 低功耗:微型操作系统通常需要在低功耗的环境下运行,它们的设计目标是在能够满足设备需求的同时将功耗最小化;
2. 实时性:对于某些物联网设备或嵌入式系统来说,实时性非常重要,微型操作系统具备管理硬件资源,实现快速响应、快速交互的功能;
3. 轻量级:微型操作系统通常非常小巧,占用空间小,资源占用率低,可以运行在较为简单的处理器和存储器上;
4. 开源:许多微型操作系统是开源的,开放了源代码,方便用户进行修改和优化。 参考技术D 微型操作系统是一种体积小、功能简单、性能高效的操作系统,常用于嵌入式系统、物联网设备、智能家居等领域。常见的微型操作系统有多种,例如:
1. FreeRTOS:高效、可靠、灵活,支持多种处理器架构和嵌入式系统。
2. µC/OS:可裁剪、可移植性强、支持多任务,使用广泛。
3. RT-Thread:实时性好、易移植、支持多种处理器和外设,使用广泛。
4. TinyOS:功能精简、可靠性高、内存占用小,主要用于传感器网络和低功耗设备等。
这些微型操作系统各有各的特点,可以根据具体的应用场景和需求选择合适的操作系统。
以上是关于常见网络拓扑结构都有哪些?各有啥特点?的主要内容,如果未能解决你的问题,请参考以下文章