golang sync.Map 原理以及性能分析
Posted 惜暮
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了golang sync.Map 原理以及性能分析相关的知识,希望对你有一定的参考价值。
sync.Map 原理以及性能分析
golang支持map关键字,golang的map的读写是编译成runtime的函数调用。但是默认的map是非线程安全的。go 1.9 版本中支持了 sync.Map 用于线程安全的map。
关于go map的实现可以参考:Golang map实践以及实现原理
支持并发的map
golang内置的map读写操作,很多都是编译器帮我们转换成runtime的函数调用,而且整体的设计比较封闭,没有留下扩展的空间。
要支持线程安全的map,一种方式就是在go内置的map上进行封装。比较简单的就是使用sync提供的锁来实现,这种是最简单的,具体情况这里就不说了。
sync.Map
go 1.9 官方提供了sync.Map 来优化线程安全的并发读写的map。该实现也是基于内置map关键字来实现的。
这个实现类似于一个线程安全的 map[interface]interface . 这个map的优化主要适用了以下场景:
(1)给定key的键值对只写了一次,但是读了很多次,比如在只增长的缓存中;
(2)当多个goroutine读取、写入和覆盖的key值不相交时。
在这两种情况下,使用Map可能比使用单独互斥锁或RWMutex的Go Map大大减少锁争用。
对于其余情况最好还是使用RWMutex保证线程安全。
数据结构
先看一下底层的数据结构:
// 封装的线程安全的map
type Map struct
// lock
mu Mutex
// 实际是readOnly这个结构
// 一个只读的数据结构,因为只读,所以不会有读写冲突。
// readOnly包含了map的一部分数据,用于并发安全的访问。(冗余,内存换性能)
// 访问这一部分不需要锁。
read atomic.Value // readOnly
// dirty数据包含当前的map包含的entries,它包含最新的entries(包括read中未删除的数据,虽有冗余,但是提升dirty字段为read的时候非常快,不用一个一个的复制,而是直接将这个数据结构作为read字段的一部分),有些数据还可能没有移动到read字段中。
// 对于dirty的操作需要加锁,因为对它的操作可能会有读写竞争。
// 当dirty为空的时候, 比如初始化或者刚提升完,下一次的写操作会复制read字段中未删除的数据到这个数据中。
dirty map[interface]*entry
// 当从Map中读取entry的时候,如果read中不包含这个entry,会尝试从dirty中读取,这个时候会将misses加一,
// 当misses累积到 dirty的长度的时候, 就会将dirty提升为read,避免从dirty中miss太多次。因为操作dirty需要加锁。
misses int
// readOnly is an immutable struct stored atomically in the Map.read field.
type readOnly struct
m map[interface]*entry
// 如果Map.dirty有些数据不在m中,这个值为true
amended bool
// An entry is a slot in the map corresponding to a particular key.
type entry struct
// *interface
p unsafe.Pointer
readOnly.amended指明Map.dirty中有readOnly.m未包含的数据,所以如果从Map.read找不到数据的话,还要进一步到Map.dirty中查找。
这里虽然有冗余的两份map数据,但是Map.dirty和readOnly.m的value都是一个指针变量 *entry,所以整体内存占用还好。
sync.Map 的kv都是 interface ,entry里面的p实际是一个 *interface,也就是entry实际保存的是指向value的指针。
这里p有三个值:
- nil: entry已被删除了,并且m.dirty为nil
- expunged: entry已被删除了,并且m.dirty不为nil,而且这个entry不存在于m.dirty中
- 其它: entry是一个正常的value
sync.Map也是在golang提供的map关键字之上封装实现的。
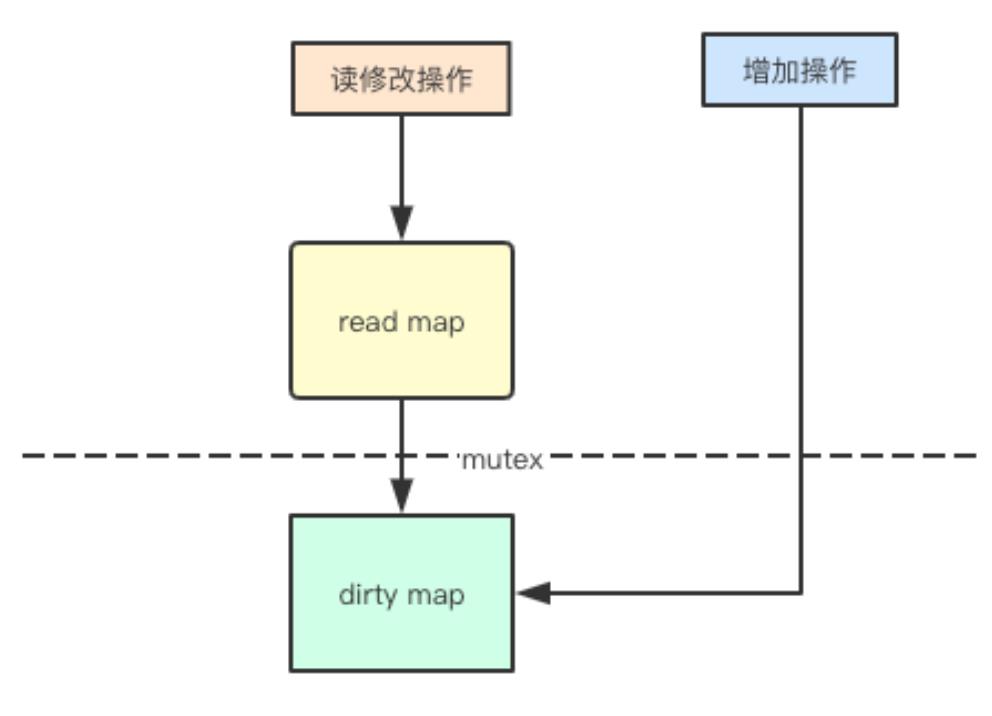
sync.Map 整体的优化可以描述为以下几点:
- 空间换时间。 通过冗余的两个数据结构(read、dirty),实现加锁对性能的影响。
- map只保存key和对应的value的指针,这样可以并发的读写map, 实际更新指向value的指针再通过基于CAS的无锁atomic。
- 使用只读数据(read),避免读写冲突
- 动态调整,miss次数多了之后,将dirty数据提升为read。
- double-checking。
- 延迟删除。 删除一个键值只是打标记,只有在提升dirty的时候才清理删除的数据。
- 优先从read读取、更新、删除,因为对read的读取不需要锁。
Load
线程安全的加载key对应的value:
func (m *Map) Load(key interface) (value interface, ok bool)
// 1.首先从m.read中加载只读的readOnly, 从它的map中查找,无锁。
read, _ := m.read.Load().(readOnly)
e, ok := read.m[key]
// 2. 如果没找到,并且m.dirty中有新数据,需要从m.dirty查找,这个时候需要加锁
if !ok && read.amended
m.mu.Lock()
// double check
read, _ = m.read.Load().(readOnly)
e, ok = read.m[key]
if !ok && read.amended
// // 从m.dirty查找
e, ok = m.dirty[key]
// 不管m.dirty中存不存在,都将misses计数加一
// missLocked()中满足条件后就会提升m.dirty
m.missLocked()
m.mu.Unlock()
if !ok
return nil, false
// 原子加载 *entry 所保存的value。
return e.load()
func (m *Map) missLocked()
m.misses++
if m.misses < len(m.dirty)
return
m.read.Store(readOnlym: m.dirty)
m.dirty = nil
m.misses = 0
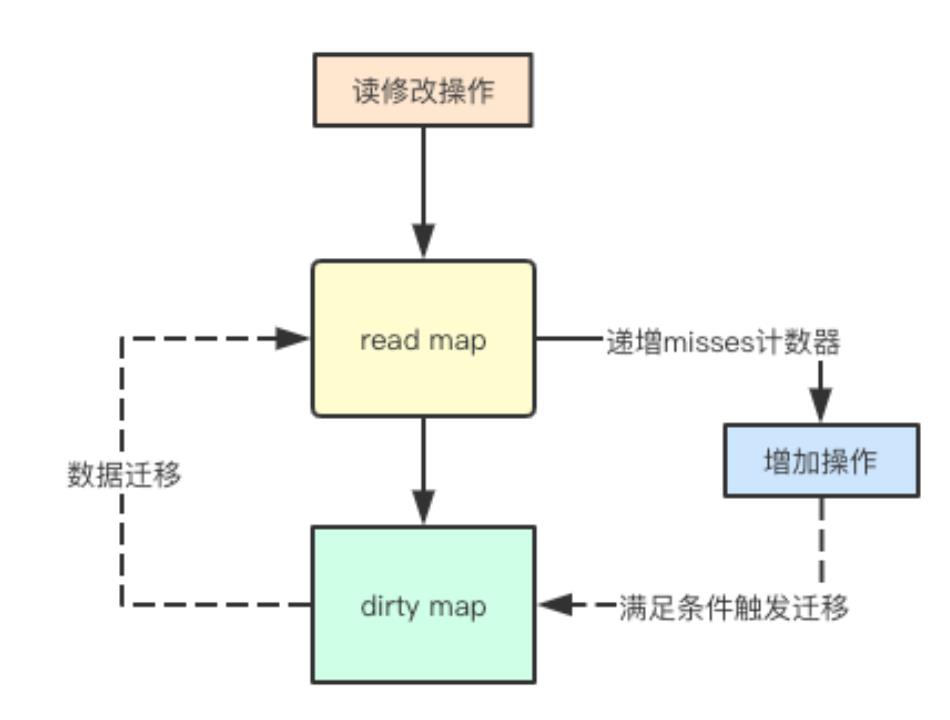
整体pipeline如下图:
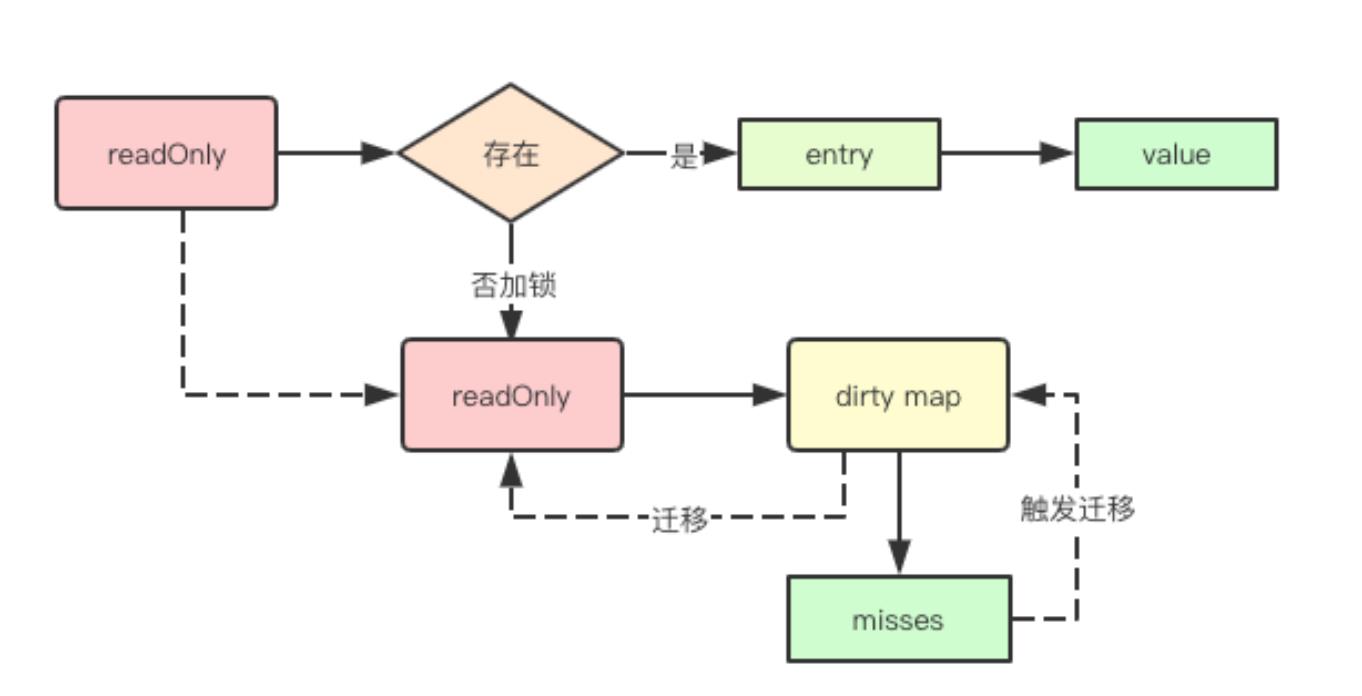
首先要强调的是,首先是从readonly里面读,读不到时候才加锁去 map.dirty 里面去读,并且加锁之后首先是进行double check(熟悉Java的都知道double check是什么)。
double check 之后即使不存在于m.read中,经过miss几次之后,m.dirty会被提升为m.read,又会从m.read中查找。所以对于更新/增加较少,加载存在的key很多的case,性能基本和无锁的map类似。
missLocked方法中可能会将m.dirty提升,m,misses会记录从readOnly中获取不到 *entry 的次数,也就是miss的次数,如果达到了 len(m.dirty) 就会原子的替换m.read.m 为 m.dirty。提升后m.dirty、m.misses重置, 并且m.read.amended为false。
Store
安全的更新一个key对应的value:
// Store sets the value for a key.
func (m *Map) Store(key, value interface)
// 1. 如果m.read存在这个键,并且这个entry没有被标记删除(expunged),那么cas自旋更新value。
// 因为m.dirty也指向这个entry,所以m.dirty也保持最新的entry。
read, _ := m.read.Load().(readOnly)
if e, ok := read.m[key]; ok && e.tryStore(&value)
return
// 2. m.read不存在或者已经被标记删除
m.mu.Lock()
// double check
read, _ = m.read.Load().(readOnly)
if e, ok := read.m[key]; ok
if e.unexpungeLocked() //标记成未被删除
//m.dirty中不存在这个键,所以加入m.dirty
m.dirty[key] = e
e.storeLocked(&value)
// m.dirty存在这个键,更新
else if e, ok := m.dirty[key]; ok
e.storeLocked(&value)
//新键值
else
//m.dirty中没有比m.readOnly更新的数据,往m.dirty中增加第一个新键
if !read.amended
// 从m.read中复制未删除的数据
// 并标记m.read已经落后于m.dirty
m.dirtyLocked()
m.read.Store(readOnlym: read.m, amended: true)
//将这个entry加入到m.dirty中
m.dirty[key] = newEntry(value)
m.mu.Unlock()
// tryStore stores a value if the entry has not been expunged.
//
// If the entry is expunged, tryStore returns false and leaves the entry
// unchanged.
func (e *entry) tryStore(i *interface) bool
for
p := atomic.LoadPointer(&e.p)
if p == expunged
return false
if atomic.CompareAndSwapPointer(&e.p, p, unsafe.Pointer(i))
return true
func (m *Map) dirtyLocked()
if m.dirty != nil
return
read, _ := m.read.Load().(readOnly)
m.dirty = make(map[interface]*entry, len(read.m))
for k, e := range read.m
if !e.tryExpungeLocked()
m.dirty[k] = e
整体的pipeline可以用下图来解释:
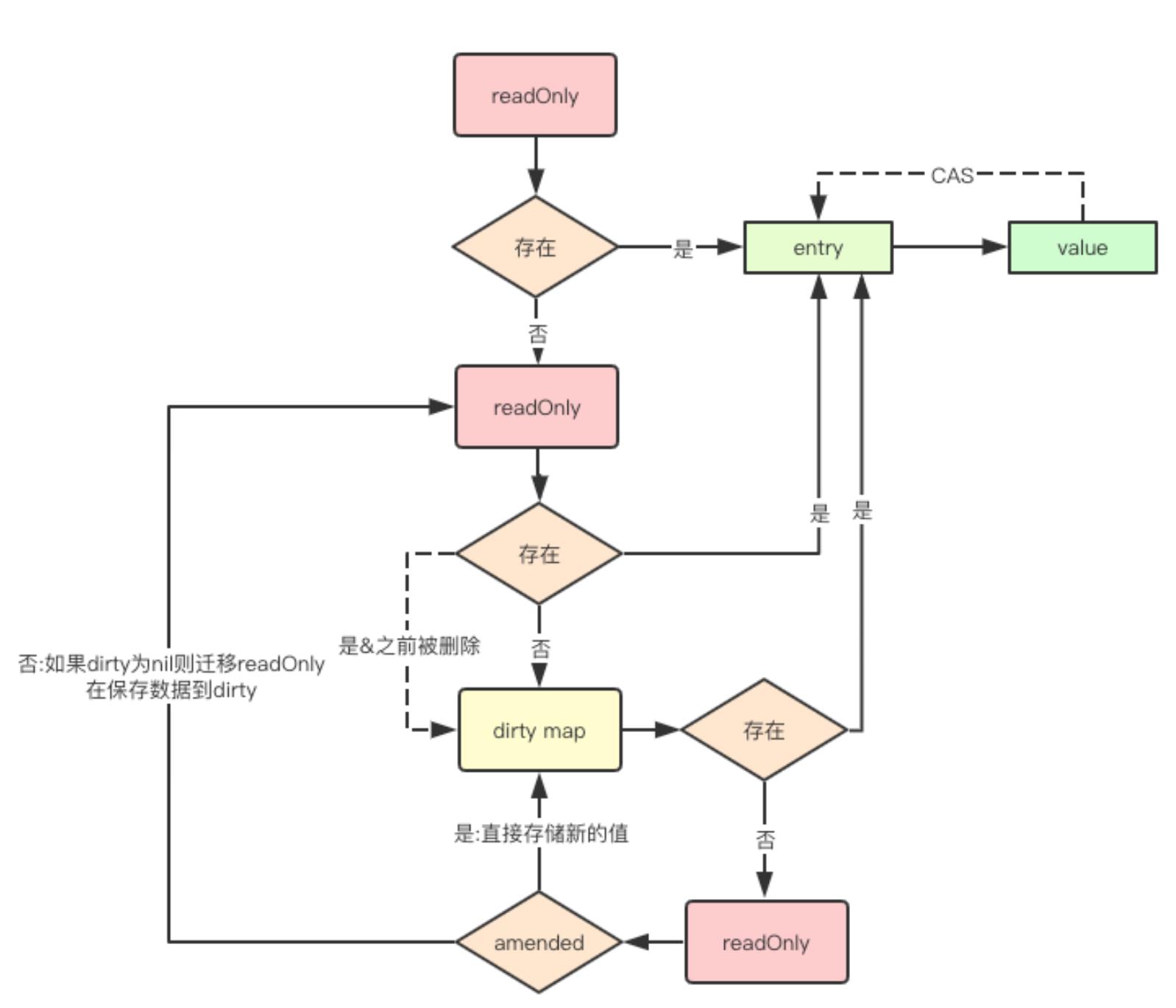
你可以看到,以上操作都是先从操作m.read开始的,不满足条件再加锁,然后操作m.dirty。
可能会发生两种数据迁移:
- 从m.dirty到m.read的迁移,这个迁移过程其实是指针的的修改,所以效率高;
- 从read map到dirty map的迁移, 这个迁移需要创建一个新的map来复制key-value,所以效率会低一些
Store可能会在某种情况下(在刚初始化和将所有元素迁移到read中后,dirty默认都是nil元素,而此时如果有新的元素增加,则需要先将read map中的所有未删除数据先迁移到dirty中)从m.read中复制数据到m.dirty,如果这个时候m.read中数据量非常大,可能会影响性能。
delete
删除一个键值对:
func (m *Map) Delete(key interface)
// 1. 如果不存在于 m.read中,而且 m.dirty 和 m.read 数据不一致。
read, _ := m.read.Load().(readOnly)
e, ok := read.m[key]
if !ok && read.amended
// 加锁,double check, 然后删除对应的key。
m.mu.Lock()
read, _ = m.read.Load().(readOnly)
e, ok = read.m[key]
if !ok && read.amended
delete(m.dirty, key)
m.mu.Unlock()
if ok
e.delete()
整体pipeline:
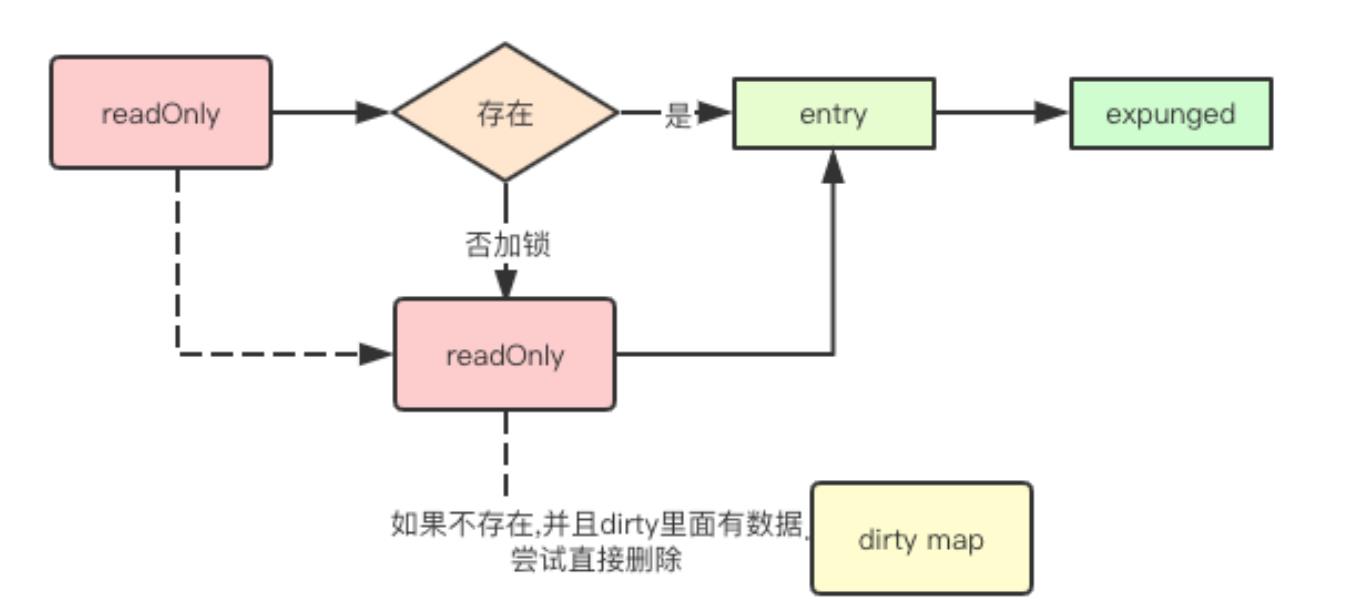
这里会删除 m.dirty 对应的key-value, 但是m.read中的key-value其实并没有删除,只是设置了删除的标志为expunged。这里的惰性删除避免了重新创建 entry 实体,只用更新指针和value指针。
func (e *entry) delete() (hadValue bool)
for
p := atomic.LoadPointer(&e.p)
if p == nil || p == expunged
return false
if atomic.CompareAndSwapPointer(&e.p, p, nil)
return true
Range
这里sync.Map是对map关键字的封装,肯定无法使用系统提供的 for range 操作。所以这里采用了一个回调的操作:
func (m *Map) Range(f func(key, value interface) bool)
// 如果m.dirty中有新数据,则提升m.dirty,然后在遍历
read, _ := m.read.Load().(readOnly)
if read.amended
///提升m.dirty
m.mu.Lock()
read, _ = m.read.Load().(readOnly)
if read.amended
read = readOnlym: m.dirty
m.read.Store(read)
m.dirty = nil
m.misses = 0
m.mu.Unlock()
// 遍历, for range是安全的
for k, e := range read.m
v, ok := e.load()
if !ok
continue
if !f(k, v)
break
Range方法调用前可能会做一个m.dirty的提升,不过提升m.dirty不是一个耗时的操作。
sync.Map总结
sync.Map的优化策略简单总结可以理解为:
- 无锁读与读写分离;
- 写加锁与延迟提升;
- 指针与惰性删除,map保存的value都是指针。惰性删除,实际删除是在 Store时候去check 然后删除。
sync.Map,读写锁的适用场景
| 实现方式 | 原理 | 适用场景 |
|---|---|---|
| map+Mutex | 通过Mutex互斥锁来实现多个goroutine对map的串行化访问 | 读写都需要通过Mutex加锁和释放锁,适用于读写比接近的场景 |
| map+RWMutex | 通过RWMutex来实现对map的读写进行读写锁分离加锁,从而实现读的并发性能提高 | 同Mutex相比适用于读多写少的场景 |
| sync.Map | 底层通分离读写map和原子指令来实现读的近似无锁,并通过延迟更新的方式来保证读的无锁化 | 读多修改少,元素增加删除频率不高的情况,在大多数情况下替代上述两种实现 |
源码提供分析背景,实际情况还是要case by case的测试。
参考文献
官方源码:src/sync/map.go
Go 1.9 sync.Map揭秘 https://colobu.com/2017/07/11/dive-into-sync-Map/
以上是关于golang sync.Map 原理以及性能分析的主要内容,如果未能解决你的问题,请参考以下文章