数据结构&算法-图关键路径
Posted 彩色墨水
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数据结构&算法-图关键路径相关的知识,希望对你有一定的参考价值。
图关键路径介绍
AOE网与AOV网都是用来对工程建模的,但它们还是很大的不同,主要体现在AOV网是顶点表示活动的网,它只描述活动之间的制约关系,而AOE网是用边表示活动的网,边上的权值表示活动持续的时间。
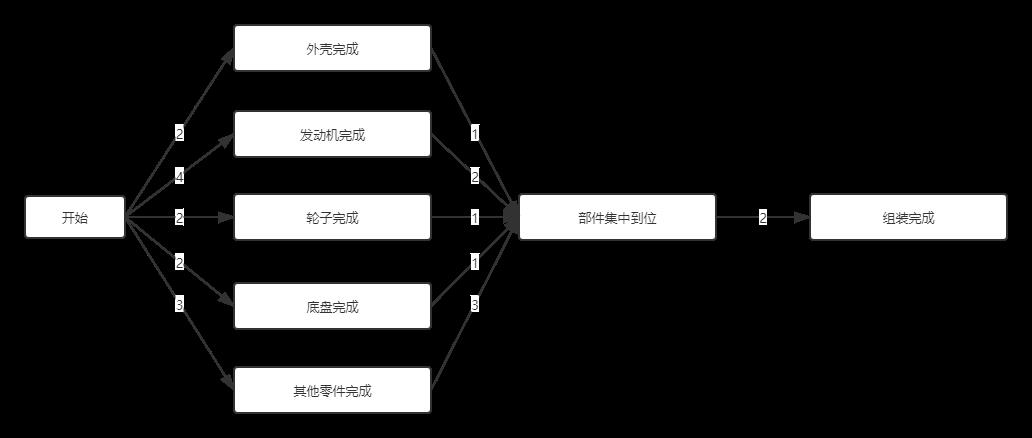
路径上各个活动所持续的时间之和称为路径长度,从源点到汇点具有最大长度的路径叫关键路径,在关键路径上的活动叫关键活动。
事件的最早发生时间etv
事件的最晚发生时间ltv
活动的最早开工时间ete
活动的最晚开工时间lte
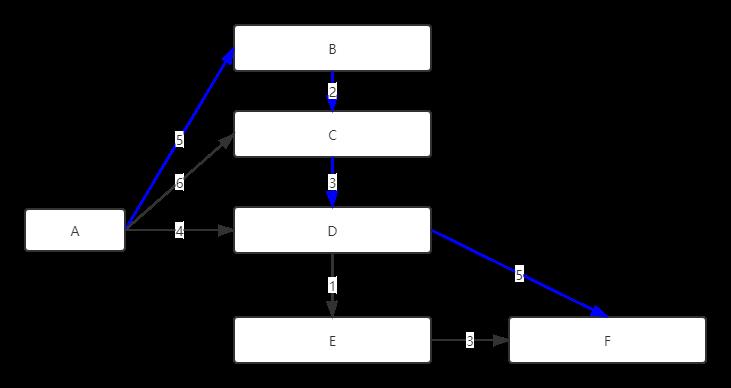
运行结果

代码
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
namespace CriticalPath
class Program
static void Main(string[] args)
OperGL operGL = new OperGL();
operGL.CreatAlGraph();
operGL.CriticalPath();
/// <summary>
/// 边表结点
/// </summary>
class EdgeNode
/// <summary>
/// 领接点域,存储该顶点对应的下标
/// </summary>
public int adjvex;
/// <summary>
/// 用于存储权值,对于非网图可以不需要
/// </summary>
public int weight = 0;
/// <summary>
/// 链域,指向下一个领接点
/// </summary>
public EdgeNode next;
public EdgeNode(int adjvex, int weight)
this.adjvex = adjvex;
this.weight = weight;
public EdgeNode(int adjvex)
this.adjvex = adjvex;
/// <summary>
/// 顶点表结点
/// </summary>
class VertexNode
/// <summary>
/// 入度
/// </summary>
public int inDeg = 0;
/// <summary>
/// 存储顶点信息
/// </summary>
public string data;
/// <summary>
/// 边表头
/// </summary>
public EdgeNode firstedge;
public VertexNode(string data)
this.data = data;
this.firstedge = null;
/// <summary>
/// 有向图
/// </summary>
class Digraph
/// <summary>
/// 顶点数组
/// </summary>
public VertexNode[] verList;
/// <summary>
/// 图顶点数
/// </summary>
public int numVertexes;
/// <summary>
/// 图边数
/// </summary>
public int numEdges;
/// <summary>
/// 创建图信息
/// </summary>
/// <param name="m">顶点数</param>
/// <param name="n">边数</param>
/// <param name="data">顶点信息集合</param>
public Digraph(int m, int n, string data)
numVertexes = m;
numEdges = n;
string[] fruit = data.Split(',');
verList = new VertexNode[numVertexes];
for (int i = 0; i < this.numVertexes; i++)
verList[i] = new VertexNode(fruit[i]);
public class OperGL
private Digraph GL = new Digraph(6, 8, "A,B,C,D,E,F");
/// <summary>
/// 创建边
/// </summary>
/// <param name="fromV">起点</param>
/// <param name="toV">终点</param>
/// <param name="weight">权重</param>
public void InitEdges(int fromV, int toV, int weight = 0)
EdgeNode temp = new EdgeNode(toV, weight);//边
if (GL.verList[fromV].firstedge == null)//如果表头为空,则把生成的边表节点放进去
GL.verList[fromV].firstedge = temp;
else//如果表头不为空,则往下找next,找到空的为止
EdgeNode ee = GL.verList[fromV].firstedge;
while (true)
if (ee.next == null)
ee.next = temp;
break;
else
ee = ee.next;
++GL.verList[toV].inDeg;//添加一条弧,增加入度
/// <summary>
/// 创建有向图
/// </summary>
public void CreatAlGraph()
InitEdges(0, 1, 5);
InitEdges(0, 2, 6);
InitEdges(0, 3, 4);
InitEdges(1, 2, 2);
InitEdges(2, 3, 3);
InitEdges(3, 4, 1);
InitEdges(4, 5, 3);
InitEdges(3, 5, 5);
/// <summary>
/// 展示图信息
/// </summary>
public void ShowALGraph()
for (int i = 0; i < GL.numVertexes; i++)
Console.WriteLine("顶点" + i + "为:" + GL.verList[i].firstedge + "--FirstEdge--");
EdgeNode temp = new EdgeNode(0, 0);
temp = GL.verList[i].firstedge;
while (temp != null)
Console.WriteLine(temp.adjvex + "--Next--");
temp = temp.next;
Console.WriteLine("END" + GL.verList[i].data);
/// <summary>
/// 事件最早发生时间
/// </summary>
int[] etv;
/// <summary>
/// 时间最迟发生时间
/// </summary>
int[] ltv;
/// <summary>
/// 用于存储拓扑序列的栈
/// </summary>
Stack<int> stack2 = new Stack<int>();
/// <summary>
/// 拓扑排序,用于关键路径计算
/// </summary>
/// <returns></returns>
public bool TopologicalSort()
EdgeNode e;
int i, k, gettop;
int count = 0;//统计输出顶点的个数
Stack<int> stack = new Stack<int>();//存储入度为0 的顶点
for (i = 0; i < GL.numVertexes; i++)
if (GL.verList[i].inDeg == 0)
stack.Push(i);//将入度为0的顶点入栈
etv = new int[GL.numVertexes];
for (i = 0; i < GL.numVertexes; i++)
etv[i] = 0;
while (stack.Count != 0)
gettop = stack.Pop();//出栈
//Console.Write(GL.verList[gettop].data);//打印此顶点
count++;//统计输出顶点数
stack2.Push(gettop);
for (e = GL.verList[gettop].firstedge; e != null; e = e.next)//对顶点弧表遍历
k = e.adjvex;
if ((--GL.verList[k].inDeg) == 0)//将k号顶点领接点的入度减1
stack.Push(k);//为0则入栈
if (etv[gettop] + e.weight > etv[k])
etv[k] = etv[gettop] + e.weight;
if (count < GL.numVertexes)//如果count小于顶点数,说明存在环
return false;
else
return true;
/// <summary>
/// 求关键路径,GL为有向网,输出GL的各项关键活动
/// </summary>
public void CriticalPath()
EdgeNode e;
int gettop, k;
int ete, lte;//声明活动最早发生时间和最迟发生时间变量
TopologicalSort();
ltv = new int[GL.numVertexes];
for (int i = 0; i < GL.numVertexes; i++)
ltv[i] = etv[GL.numVertexes - 1];//初始化ltv
while (stack2.Count != 0)//计算ltv
gettop = stack2.Pop();//将拓扑序列出栈,后进先出
for (e = GL.verList[gettop].firstedge; e != null; e = e.next)
//求各顶点事件的最迟发生时间ltv值
k = e.adjvex;
if (ltv[k] - e.weight < ltv[gettop])//求各顶点事件最晚发生时间ltv
ltv[gettop] = ltv[k] - e.weight;
for (int j = 0; j < GL.numVertexes; j++)//求ete,lte和关键活动
for (e = GL.verList[j].firstedge; e != null; e = e.next)
k = e.adjvex;
ete = etv[j];//活动最早发生时间
lte = ltv[k] - e.weight;//活动最迟发生时间
if (ete == lte)//两者相等即在关键路径上
Console.Write("<0,1>length:2,", GL.verList[j].data, GL.verList[k].data, e.weight);
以上是关于数据结构&算法-图关键路径的主要内容,如果未能解决你的问题,请参考以下文章