垃圾分类数据集+垃圾分类识别训练代码(支持googlenet, resnet, inception_v3, mobilenet_v2)
Posted AI吃大瓜
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了垃圾分类数据集+垃圾分类识别训练代码(支持googlenet, resnet, inception_v3, mobilenet_v2)相关的知识,希望对你有一定的参考价值。
垃圾分类数据集+垃圾分类识别训练代码(支持googlenet, resnet, inception_v3, mobilenet_v2)
目录
垃圾分类数据集+垃圾分类识别训练代码(支持googlenet, resnet, inception_v3, mobilenet_v2)
1. 前言
垃圾分类,指按一定规定或标准将垃圾分类储存、分类投放和分类搬运,从而转变成公共资源的一系列活动的总称。分类的目的是提高垃圾的资源价值和经济价值,力争物尽其用。智能化垃圾分类系统能能够加速绿色环保的垃圾处理过程,并且对于居民垃圾分类意识的养成有极大的促进作用,对绿色都市和智能化城市管理都有着重大意义。

本项目将采用深度学习的方法,搭建一个垃圾分类识别的训练和测试系统,实现智能化垃圾分类。目前,基于ResNet18的垃圾分类识别,在垃圾数据集dataset2,训练集的Accuracy在94%左右,测试集的Accuracy在92%左右,骨干网络,可支持googlenet, resnet[18,34,50], inception_v3,mobilenet_v2等常用模型。如果想进一步提高准确率,可以尝试:
- 最重要的: 清洗数据集,垃圾数据集dataset1和垃圾数据集dataset2,大部分数据都是网上爬取的,质量并不高,存在很多错误的图片,尽管鄙人已经清洗一部分了,但还是建议你,训练前,再次清洗数据集,不然会影响模型的识别的准确率。
- 使用不同backbone模型,比如resnet50或者更深模型
- 增加数据增强: 已经支持: 随机裁剪,随机翻转,随机旋转,颜色变换等数据增强方式,可以尝试诸如mixup,CutMix等更复杂的数据增强方式
- 样本均衡: 建议进行样本均衡处理
- 调超参: 比如学习率调整策略,优化器(SGD,Adam等)
- 损失函数: 目前训练代码已经支持:交叉熵,LabelSmoothing,可以尝试FocalLoss等损失函数
【源码下载】垃圾分类数据集+垃圾分类识别训练代码(Pytorch)
【尊重原创,转载请注明出处】https://panjinquan.blog.csdn.net/article/details/126419147
2. 垃圾数据集说明
(1)垃圾数据集dataset1
这是通过网上爬虫获取的垃圾数据集,总共包含了可回收物(recyclables)、有害垃圾(hazardous)、厨余垃圾(kitchen)、其他垃圾(other)四大类,以及40个小类。其中可回收物(recyclables)23种、有害垃圾(hazardous)3种、厨余垃圾(kitchen)8种、其他垃圾(other)6种,每种垃圾包含大约400张图片,共1.7万余张图像。
其中Train集16200张图片,平均每个类别405张;Test集800张图片,平均每个类别20张图片
| 垃圾类别 | 样图 |
| 可回收物(recyclables) |   |
| 有害垃圾(hazardous) |   |
| 厨余垃圾(kitchen) |   |
| 其他垃圾(other) |  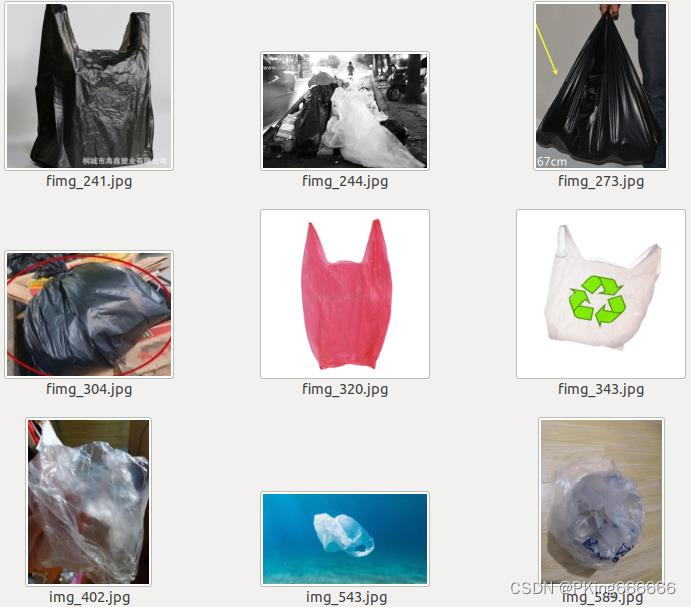 |
下表给出垃圾数据集dataset1的40个类别:
0-other garbage-fast food box
1-other garbage-soiled plastic
2-other garbage-cigarette
3-other garbage-toothpick
4-other garbage-flowerpot
5-other garbage-bamboo chopsticks
6-kitchen waste-meal
7-kitchen waste-bone
8-kitchen waste-fruit peel
9-kitchen waste-pulp
10-kitchen waste-tea
11-kitchen waste-Vegetable
12-kitchen waste-eggshell
13-kitchen waste-fish bone
14-recyclables-powerbank
15-recyclables-bag
16-recyclables-cosmetic bottles
17-recyclables-toys
18-recyclables-plastic bowl
19-recyclables-plastic hanger
20-recyclables-paper bags
21-recyclables-plug wire
22-recyclables-old clothes
23-recyclables-can
24-recyclables-pillow
25-recyclables-plush toys
26-recyclables-shampoo bottle
27-recyclables-glass cup
28-recyclables-shoes
29-recyclables-anvil
30-recyclables-cardboard
31-recyclables-seasoning bottle
32-recyclables-bottle
33-recyclables-metal food cans
34-recyclables-pot
35-recyclables-edible oil barrel
36-recyclables-drink bottle
37-hazardous waste-dry battery
38-hazardous waste-ointment
39-hazardous waste-expired drugs
(2)垃圾数据集dataset2
该垃圾数据集是只包含两个大类,没有细分小类,其中类别Organic表示有机垃圾,类别Recycle表示可回收垃圾。Train集22,566张图片,Test集2,513张图片。
| 垃圾类别 | 样图 |
| Organic有机垃圾 |  |
| Recycle回收垃圾 |  |
(3)自定义数据集
如果需要新增类别数据,或者需要自定数据集进行训练,可以如下进行处理:
- Train和Test数据集,要求相同类别的图片,放在同一个文件夹下;且子目录文件夹命名为类别名称,如
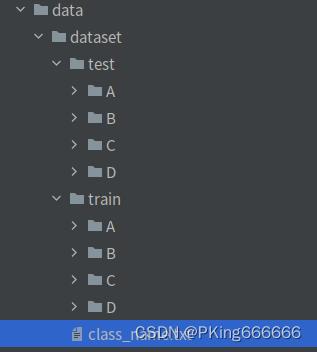
- 类别文件:一行一个列表: class_name.txt
(最后一行,请多回车一行)
A
B
C
D
- 修改配置文件的数据路径:config.yaml
train_data: # 可添加多个数据集
- 'data/dataset/train1'
- 'data/dataset/train2'
test_data: 'data/dataset/test'
class_name: 'data/dataset/class_name.txt'
...
...垃圾数据集dataset1和垃圾数据集dataset2,大部分数据都是网上爬取的,质量并不高,存在很多错误的图片,尽管鄙人已经清洗一部分了,但还是建议你,训练前,再次清洗数据集,不然会影响模型的识别的准确率。
3. 垃圾分类识别模型训练
(1)项目框架说明
整套工程基本框架结构如下:
.
├── classifier # 训练模型相关工具
├── configs # 训练配置文件
├── data # 训练数据
├── libs
├── demo.py # 模型推理demo
├── README.md # 项目工程说明文档
├── requirements.txt # 项目相关依赖包
└── train.py # 训练文件(2)准备Train和Test数据
下载垃圾分类数据集,Train和Test数据集,要求相同类别的图片,放在同一个文件夹下;且子目录文件夹命名为类别名称。
数据增强方式主要采用: 随机裁剪,随机翻转,随机旋转,颜色变换等处理方式
import numbers
import random
import PIL.Image as Image
import numpy as np
from torchvision import transforms
def image_transform(input_size, rgb_mean=[0.5, 0.5, 0.5], rgb_std=[0.5, 0.5, 0.5], trans_type="train"):
"""
不推荐使用:RandomResizedCrop(input_size), # bug:目标容易被crop掉
:param input_size: [w,h]
:param rgb_mean:
:param rgb_std:
:param trans_type:
:return::
"""
if trans_type == "train":
transform = transforms.Compose([
transforms.Resize([int(128 * input_size[1] / 112), int(128 * input_size[0] / 112)]),
transforms.RandomHorizontalFlip(), # 随机左右翻转
# transforms.RandomVerticalFlip(), # 随机上下翻转
transforms.ColorJitter(brightness=0.5, contrast=0.5, saturation=0.5, hue=0.1),
transforms.RandomRotation(degrees=5),
transforms.RandomCrop([input_size[1], input_size[0]]),
transforms.ToTensor(),
transforms.Normalize(mean=rgb_mean, std=rgb_std),
])
elif trans_type == "val" or trans_type == "test":
transform = transforms.Compose([
transforms.Resize([input_size[1], input_size[0]]),
# transforms.CenterCrop([input_size[1], input_size[0]]),
# transforms.Resize(input_size),
transforms.ToTensor(),
transforms.Normalize(mean=rgb_mean, std=rgb_std),
])
else:
raise Exception("transform_type ERROR:".format(trans_type))
return transform修改配置文件数据路径:config.yaml
# 训练数据集,可支持多个数据集
train_data:
- '/path/to/rubbish/dataset2/train'
# 测试数据集
test_data: '/path/to/rubbish/dataset2/test'
# 类别文件
class_name: '/path/to/rubbish/dataset2/class_name.txt'(3)配置文件:config.yaml
- 目前支持的backbone有:googlenet,resnet[18,34,50],inception_v3,mobilenet_v2等, 其他backbone可以自定义添加
- 训练参数可以通过(configs/config.yaml)配置文件进行设置
配置文件:config.yaml说明如下:
# 训练数据集,可支持多个数据集
train_data:
- '/path/to/rubbish/dataset2/train'
# 测试数据集
test_data: '/path/to/rubbish/dataset2/test'
# 类别文件
class_name: '/path/to/rubbish/dataset2/class_name.txt'
train_transform: "train" # 训练使用的数据增强方法
test_transform: "val" # 测试使用的数据增强方法
work_dir: "work_space/" # 保存输出模型的目录
net_type: "resnet18" # 骨干网络,支持:resnet18/50,mobilenet_v2,googlenet,inception_v3
width_mult: 1.0
input_size: [ 224,224 ] # 模型输入大小
rgb_mean: [ 0.5, 0.5, 0.5 ] # for normalize inputs to [-1, 1],Sequence of means for each channel.
rgb_std: [ 0.5, 0.5, 0.5 ] # for normalize,Sequence of standard deviations for each channel.
batch_size: 32
lr: 0.01 # 初始学习率
optim_type: "SGD" # 选择优化器,SGD,Adam
loss_type: "CrossEntropyLoss" # 选择损失函数:支持CrossEntropyLoss,LabelSmoothing
momentum: 0.9 # SGD momentum
num_epochs: 100 # 训练循环次数
num_warn_up: 3 # warn-up次数
num_workers: 8 # 加载数据工作进程数
weight_decay: 0.0005 # weight_decay,默认5e-4
scheduler: "multi-step" # 学习率调整策略
milestones: [ 20,50,80 ] # 下调学习率方式
gpu_id: [ 0 ] # GPU ID
log_freq: 50 # LOG打印频率
progress: True # 是否显示进度条
pretrained: False # 是否使用pretrained模型
finetune: False # 是否进行finetune| 参数 | 类型 | 参考值 | 说明 |
|---|---|---|---|
| train_data | str, list | - | 训练数据文件,可支持多个文件 |
| test_data | str, list | - | 测试数据文件,可支持多个文件 |
| class_name | str | - | 类别文件 |
| work_dir | str | work_space | 训练输出工作空间 |
| net_type | str | resnet18 | backbone类型,resnet18/50,mobilenet_v2,googlenet,inception_v3 |
| input_size | list | [128,128] | 模型输入大小[W,H] |
| batch_size | int | 32 | batch size |
| lr | float | 0.1 | 初始学习率大小 |
| optim_type | str | SGD | 优化器,SGD,Adam |
| loss_type | str | CELoss | 损失函数 |
| scheduler | str | multi-step | 学习率调整策略,multi-step,cosine |
| milestones | list | [30,80,100] | 降低学习率的节点,仅仅scheduler=multi-step有效 |
| momentum | float | 0.9 | SGD动量因子 |
| num_epochs | int | 120 | 循环训练的次数 |
| num_warn_up | int | 3 | warn_up的次数 |
| num_workers | int | 12 | DataLoader开启线程数 |
| weight_decay | float | 5e-4 | 权重衰减系数 |
| gpu_id | list | [ 0 ] | 指定训练的GPU卡号,可指定多个 |
| log_freq | in | 20 | 显示LOG信息的频率 |
| finetune | str | model.pth | finetune的模型 |
| progress | bool | True | 是否显示进度条 |
| distributed | bool | False | 是否使用分布式训练 |
(4)开始训练
整套训练代码非常简单操作,用户只需要将相同类别的数据放在同一个目录下,并填写好对应的数据路径,即可开始训练了。
python train.py -c configs/config.yaml
(5)可视化训练过程
训练过程可视化工具是使用Tensorboard,使用方法:
# 基本方法
tensorboard --logdir=path/to/log/
# 例如
tensorboard --logdir=work_space/mobilenet_v2_1.0_CrossEntropyLoss/log
可视化效果
 | 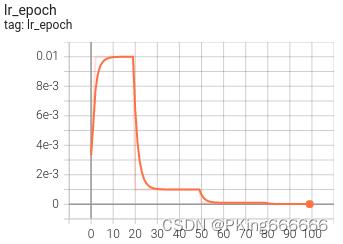 |
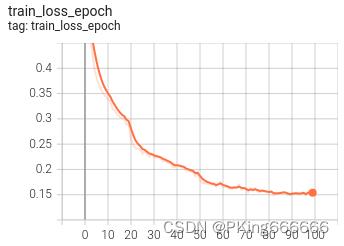 | 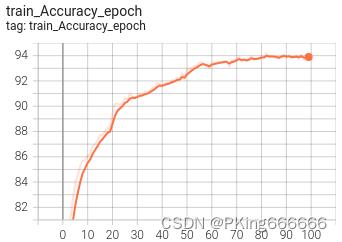 |
 |  |
(6)一些优化建议
训练完成后,在垃圾数据集dataset2训练集的Accuracy在94%左右,测试集的Accuracy在92%左右;而在垃圾数据集dataset1的Accuracy在83%左右,如果想进一步提高准确率,可以尝试:
- 最重要的: 清洗数据集,垃圾数据集dataset1和垃圾数据集dataset2,大部分数据都是网上爬取的,质量并不高,存在很多错误的图片,尽管鄙人已经清洗一部分了,但还是建议你,训练前,再次清洗数据集,不然会影响模型的识别的准确率。
- 使用不同backbone模型,比如resnet50或者更深模型
- 增加数据增强: 已经支持: 随机裁剪,随机翻转,随机旋转,颜色变换等数据增强方式,可以尝试诸如mixup,CutMix等更复杂的数据增强方式
- 样本均衡: 建议进行样本均衡处理
- 调超参: 比如学习率调整策略,优化器(SGD,Adam等)
- 损失函数: 目前训练代码已经支持:交叉熵,LabelSmoothing,可以尝试FocalLoss等损失函数
4. 垃圾分类识别模型测试效果
demo.py文件用于推理和测试模型的效果,填写好配置文件,模型文件以及测试图片即可运行测试了
def get_parser():
# 配置文件
config_file = "data/pretrained/resnet18_1.0_CrossEntropyLoss_20220822153756/config.yaml"
# 模型文件
model_file = "data/pretrained/resnet18_1.0_CrossEntropyLoss_20220822153756/model/best_model_043_92.5587.pth"
# 待测试图片目录
image_dir = "data/test_images/rubbish"
parser = argparse.ArgumentParser(description="Inference Argument")
parser.add_argument("-c", "--config_file", help="configs file", default=config_file, type=str)
parser.add_argument("-m", "--model_file", help="model_file", default=model_file, type=str)
parser.add_argument("--device", help="cuda device id", default="cuda:0", type=str)
parser.add_argument("--image_dir", help="image file or directory", default=image_dir, type=str)
return parser
python demo.py \\
-c "data/pretrained/resnet18_1.0_CrossEntropyLoss_20220822153756/config.yaml" \\
-m "data/pretrained/resnet18_1.0_CrossEntropyLoss_20220822153756/model/best_model_043_92.5587.pth" \\
--image_dir "data/test_images/rubbish"运行测试结果:

|
pred_index:['Organic'],pred_score:[0.9952668] |
pred_index:['Organic'],pred_score:[0.9911327] |
|
pred_index:['Recycle'],pred_score:[0.73851496] |
pred_index:['Recycle'],pred_score:[0.9988349] |




5.项目源码下载
整套项目源码内容包含:
- 垃圾数据集dataset1,其中Train集16200张图片,Test集800张图片
- 垃圾数据集dataset2,其中Train集22,566张图片,Test集2,513张图片
- 支持自定义数据集训练
- 整套垃圾分类训练代码和测试代码(Pytorch版本)
【源码下载】垃圾分类数据集+垃圾分类识别训练代码(Pytorch)
以上是关于垃圾分类数据集+垃圾分类识别训练代码(支持googlenet, resnet, inception_v3, mobilenet_v2)的主要内容,如果未能解决你的问题,请参考以下文章
智能生活垃圾检测与分类系统(UI界面+YOLOv5+训练数据集)