基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
Posted AI吃大瓜
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)相关的知识,希望对你有一定的参考价值。
基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
目录
基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
1. 前言
手势作为一种肢体语言,在人类交流中的使用起着重要作用。一个简单的手势蕴涵着丰富的信息,正因为如此,人与人可以之间通过手势来传达大量的信息,实现高速的通信。将手势运用于计算机,能够很好地改善人机交互的效率。
人类的手势主要分为:
1)交互性手势与操作性手势:前者手的运动表示特定的信息(如乐队指挥),靠视觉来感知,后者不表达任何信息(如弹琴)。
2)自主性手势和非自主性手势:后者与语音配合用来加强或补充某些信息(如演讲者用手势描述动作、空间结构等信息)。
3)离心手势和向心手势:前者直接针对说话人,有明确的交流意图,后者只是反映说话人的情绪和内心的愿望。
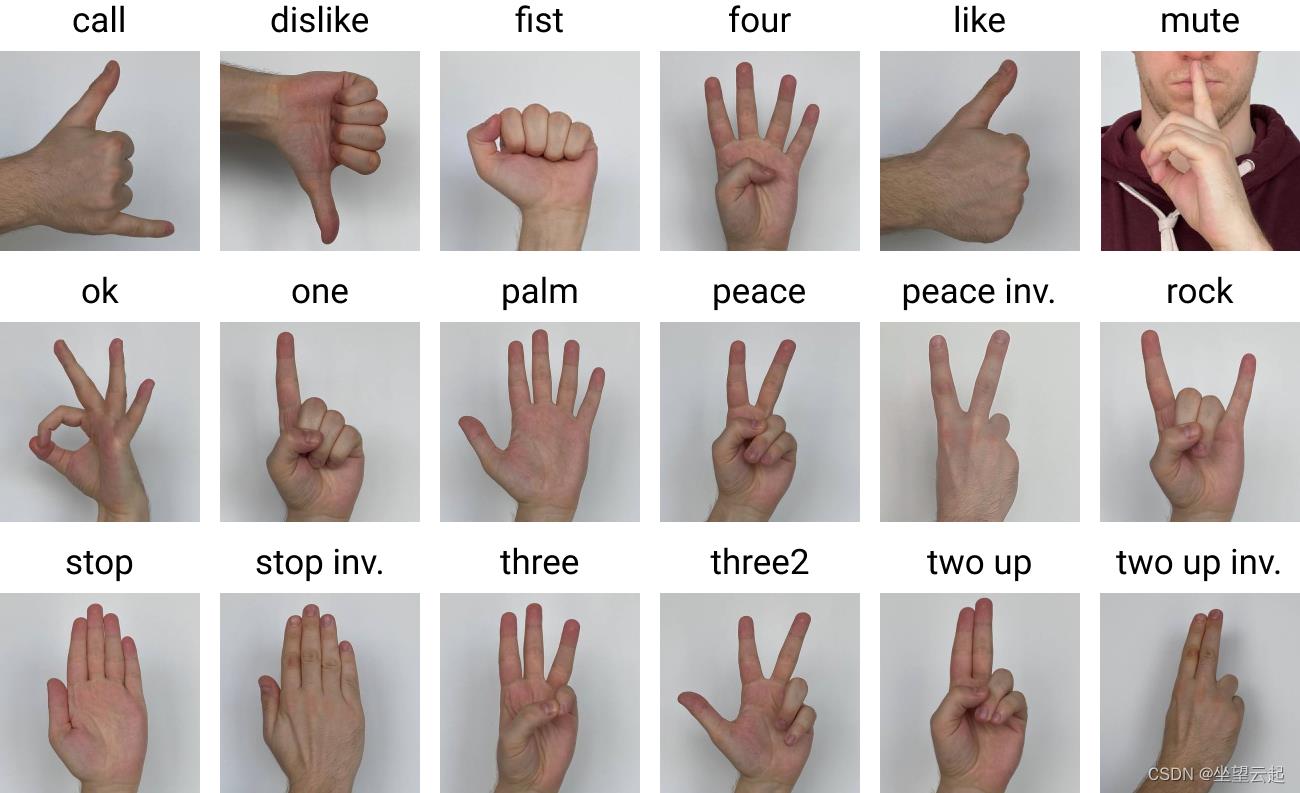
手势识别(HGR)作为人机交互的一部分,在汽车领域、家庭自动化系统、各种视频/流媒体平台等领域具有广泛的实际应用。本篇博客,将基于YOLOv5搭建一个手势识别目标检测系统,支持one,two,ok等18种常见的通用手势动作识别,目前基于多目标检测的手势识别方法YOLOv5s的平均精度平均值mAP_0.5=0.99569,mAP_0.5:0.95=0.87605,基本满足业务的性能需求。
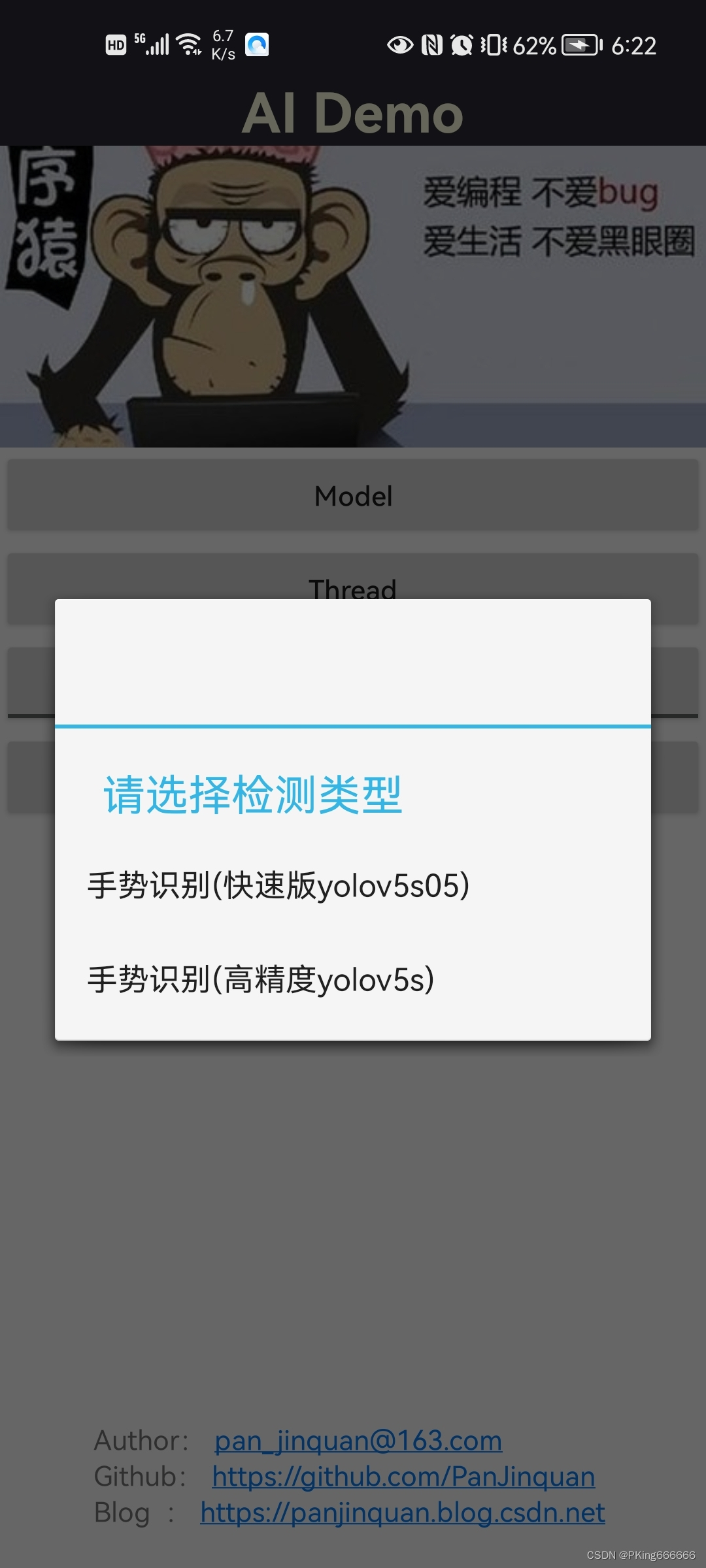
另外,为了能部署在手机android平台,本人对YOLOv5s进行了模型轻量化,开发了一个轻量级的版本,yolov5s05,在普通Android手机上可以达到实时的手势识别效果,CPU(4线程)约30ms左右,GPU约25ms左右 ,基本满足业务的性能需求。
先展示一下Python版本手势识别Demo视频效果:
|
|
|


【源码下载】 基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
【尊重原创,转载请注明出处】https://panjinquan.blog.csdn.net/article/details/126750433
还有更多Android版本的手势识别效果:Android手部检测和手势识别(含训练代码+Android源码+手势识别数据集)_PKing666666的博客-CSDN博客
 |  |  |
2. 手势识别的方法
(1)基于多目标检测的手势识别方法
基于多目标检测的手势识别方法,一步到位,把手势类别直接当成多个目标检测的类别进行训练。
- 该方案采用one-stage的方法,直接端到端训练,任务简单,速度较快;
- 新增类别或者数据,需要人工拉框标注手势,成本较大
- 需要均衡采集的不同手势类别的样本数
- 部署简单
(2)基于手部检测+手势分类识别方法
该方法,先训练一个通用的手部检测模型(不区分手势,只检测手部框),然后裁剪手部区域,再训练一个手势分类器,完成对不同手势的分类识别。
- 该方案采用two-stage方法,可针对性分别提高检测模型和分类模型的性能
- 手部检测模型不区分手势,只检测手部框,检测精度较高,
- 手势分类模型可以做到很轻量
- 手势分类数据比较容易采集(你可以采集一个动手一个视频,这样经过手部检测裁剪下来的图片都是同一个类别的动作,减少人工拉框标注手势的成本)
- 由于采用two-stage方法进行检测-识别,因此速度相对较慢
考虑到HaGRID手势识别数据集,所有图片已经标注了手势类别和检测框,因此采用“基于多目标检测的手势识别方法”更为简单。本篇博客就是基于多目标检测的手势识别方法,多目标检测的的方法较多,比如Faster-RCNN,YOLO系列,SSD等均可以采用,本博客将采用YOLOv5进行多目标检测的手势识别训练。
如果你的数据集仅有部分检测框,但手势分类图片的数据集比较容易采集,建议使用“基于手部检测+手势分类识别方法”,毕竟这方案标注成本比较低。若你需要这个方案,可以微信公众号联系我。
3. 手势识别数据集说明
(1)HaGRID手势识别数据集
原始的HaGRID数据集非常大,图片都是高分辨率(1920 × 1080)200W像素,完整下载HaGRID数据集,至少需要716GB的硬盘空间。另外,由于是外网链接,下载可能经常掉线。
考虑到这些问题,本人对HaGRID数据集进行精简和缩小分辨率,目前整个数据集已经压缩到18GB左右,可以满足手势识别分类和检测的任务需求,为了有别于原始数据集,该数据集称为Light-HaGRID数据集,即一个比较轻量的手势识别数据集。
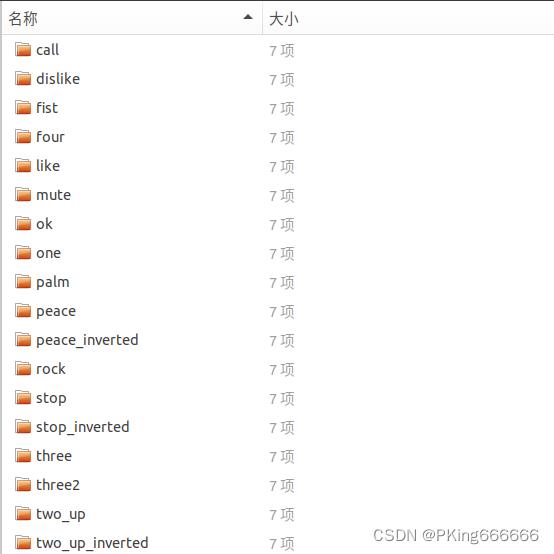
- 提供手势动作识别数据集,共18个手势类别,每个类别约含有7000张图片,总共123731张图片(12W+)
- 提供所有图片的json标注格式文件,即原始HaGRID数据集的标注格式
- 提供所有图片的XML标注格式文件,即转换为VOC数据集的格式
- 提供所有手势区域的图片,每个标注框的手部区域都裁剪下来,并保存在Classification文件夹下
- 可用于手势目标检测模型训练
- 可用于手势分类识别模型训练
关于《HaGRID手势识别数据集使用说明和下载》,请参考鄙人另一篇博客,
https://panjinquan.blog.csdn.net/article/details/126725796
(2)自定义数据集
如果需要增/删类别数据进行训练,或者需要自定数据集进行训练,可参考如下步骤:
- 采集手势图片,建议不少于200张图片
- 使用Labelme等标注工具,对手势拉框标注:labelme工具:GitHub - wkentaro/labelme: Image Polygonal Annotation with Python (polygon, rectangle, circle, line, point and image-level flag annotation).
- 将标注格式转换为VOC数据格式,参考工具:labelme/labelme2voc.py at main · wkentaro/labelme · GitHub
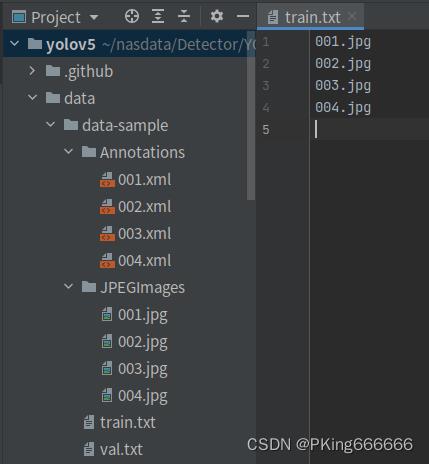
- 生成训练集train.txt和验证集val.txt文件列表
- 修改engine/configs/voc_local.yaml的train和val的数据路径
- 重新开始训练
4. 基于YOLOv5的手势识别训练
(1)YOLOv5说明
训练Pipeline采用YOLOv5: https://github.com/ultralytics/yolov5 , 原始代码训练需要转换为YOLO的格式,不支持VOC的数据格式。为了适配VOC数据,本人新增了LoadVOCImagesAndLabels用于解析VOC数据集进行训练。另外,为了方便测试,还增加demo.py文件,可支持对图片和视频的测试。
Python依赖环境:
matplotlib>=3.2.2
numpy>=1.18.5
opencv-python>=4.1.2
Pillow
PyYAML>=5.3.1
scipy>=1.4.1
torch>=1.7.0
torchvision>=0.8.1
tqdm>=4.41.0
tensorboard>=2.4.1
seaborn>=0.11.0
pandas
thop # FLOPs computation
pybaseutils
(2)准备Train和Test数据
下载HaGRID手势识别数据集,这个数据至少需要716GB的硬盘空间,超大哦;如果你想偷点懒,那就直接采用Light-HaGRID数据集下载,才18GB,数据格式都已经处理好,可以直接拿来使用。关于《HaGRID手势识别数据集使用说明和下载》,请参考鄙人另一篇博客:
(3)配置数据文件
- 修改训练和测试数据的路径:engine/configs/voc_local.yaml (一共有18个手势文件夹,全部加上)
# 数据路径
path: "" # dataset root dir
train:
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/call/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/dislike/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/fist/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/four/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/like/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/mute/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/ok/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/one/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/palm/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/peace/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/peace_inverted/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/rock/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/stop/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/stop_inverted/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/three/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/three2/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/two_up/train.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/two_up_inverted/train.txt"
val:
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/call/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/dislike/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/fist/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/four/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/like/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/mute/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/ok/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/one/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/palm/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/peace/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/peace_inverted/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/rock/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/stop/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/stop_inverted/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/three/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/three2/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/two_up/val.txt"
- "/home/pjq/dataset/csdn/gesture/Light-HaGRID/trainval/two_up_inverted/val.txt"
test: # test images (optional)
data_type: voc
# Classes
nc: 19 # number of classes
names: 'one': 0, 'two_up': 1, 'two_up_inverted': 2, 'three': 3, 'three2': 4,
'four': 5, 'fist': 6, 'palm': 7, 'ok': 8, 'peace': 9,
'peace_inverted': 10, 'like': 11, 'dislike': 12, 'stop': 13, 'stop_inverted': 14,
'call': 15, 'mute': 16, 'rock': 17, 'no_gesture': 18
HaGRID手势识别数据集一共有18个手势,额外还有一个无手势的类别,即no_gesture;如果你想自定义手势类型,比如你希望只训练one,tow,three,four和no_gesture类别,请修改,请修改:
names: 'one': 0, 'two_up': 1, 'three': 2, 'four': 3, 'no_gesture': 4 nc: 5
(4)配置模型文件
官方YOLOv5给出了YOLOv5l,YOLOv5m,YOLOv5s等模型,这里仅仅考虑YOLOv5s模型。考虑到手机端CPU/GPU性能比较弱鸡,直接部署yolov5s运行速度十分慢。所以本人在yolov5s基础上进行模型轻量化处理,即将yolov5s的模型的channels通道数全部都减少一半,并且模型输入由原来的640×640降低到320×320,该轻量化的模型我称之为yolov5s05。从性能来看,yolov5s05比yolov5s快5多倍,而mAP下降了5%(0.87605→0.82706),对于手机端,这精度还是可以接受。
官方YOLOv5: https://github.com/ultralytics/yolov5
下面是yolov5s05和yolov5s的参数量和计算量对比:
| 模型 | input-size | params(M) | GFLOPs | 手势识别mAP(0.5:0.95) |
| yolov5s | 640×640 | 7.2 | 16.5 | 0.87605 |
| yolov5s05 | 320×320 | 1.7 | 1.1 | 0.82706 |
(5)重新聚类Anchor(可选)
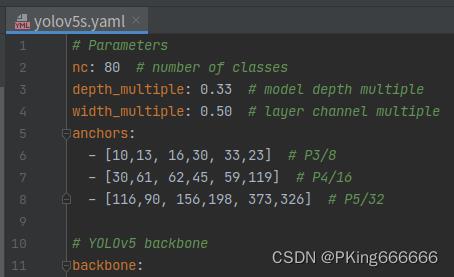
官方yolov5s的Anchor是基于COCO数据集进行聚类获得(详见models/yolov5s.yaml文件)
对于yolov5s05的Anchor,重新聚类的结果:
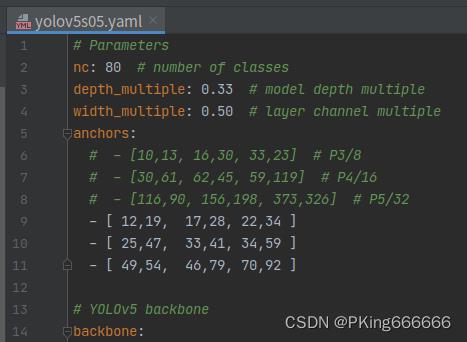
而不同的数据集最优Anchor自然需要重新聚类,做适当的调整 。当然你要是觉得麻烦就跳过,不需要重新聚类Anchor,这个影响不是很大。如果你需要重新聚类,请参考engine/kmeans_anchor/demo.py文件
(6)开始训练
整套训练代码非常简单操作,用户只需要将相同类别的数据放在同一个目录下,并填写好对应的数据路径,即可开始训练了。
- 修改训练超参文件: data/hyps/hyp.scratch-v1.yaml (可以修改训练学习率,数据增强等方式,使用默认即可)
- 编辑train.sh脚本训练,训练yolov5s或轻量化版本yolov5s05 (选择其中一个训练即可)
#!/usr/bin/env bash
#--------------训练yolov5s--------------
# 输出项目名称路径
project="runs/yolov5s"
# 训练和测试数据的路径
data="engine/configs/voc_local.yaml"
# YOLOv5模型配置文件
cfg="yolov5s.yaml"
# 训练超参数文件
hyp="data/hyps/hyp.scratch-v1.yaml"
# 预训练文件
weights="engine/pretrained/yolov5s.pt"
python train.py --data $data --cfg $cfg --hyp $hyp --weights $weights --batch-size 32 --imgsz 640 --workers 12 --project $project
#--------------训练轻量化版本yolov5s05--------------
# 输出项目名称路径
project="runs/yolov5s05"
# 训练和测试数据的路径
data="engine/configs/voc_local.yaml"
# YOLOv5模型配置文件
cfg="yolov5s05.yaml"
# 训练超参数文件
hyp="data/hyps/hyp.scratch-v1.yaml"
# 预训练文件
weights="engine/pretrained/yolov5s.pt"
python train.py --data $data --cfg $cfg --hyp $hyp --weights $weights --batch-size 32 --imgsz 320 --workers 12 --project $project
- 开始训练: bash train.sh
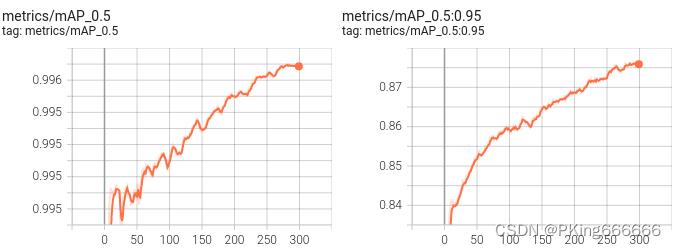
训练完成,可以得到yolov5s手势识别mAP指标大约mAP_0.5=0.99569,mAP_0.5:0.95=0.87605 ;而yolov5s05手势识别mAP指标大约mAP_0.5=0.99421,mAP_0.5:0.95=0.82706
(7)可视化训练过程
训练过程可视化工具是使用Tensorboard,使用方法:
# 基本方法
tensorboard --logdir=path/to/log/
# 例如
tensorboard --logdir ./runs/yolov5s_640 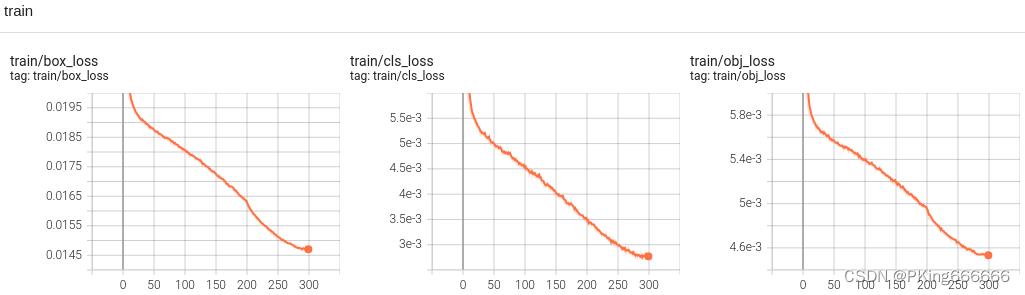 | |
 | |
 | |
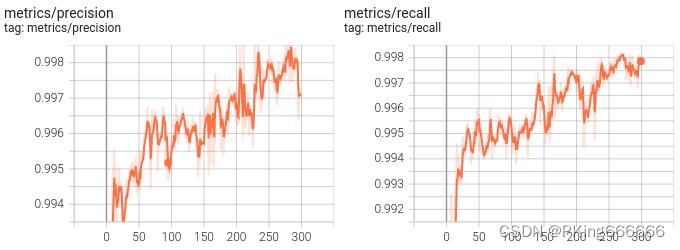 |
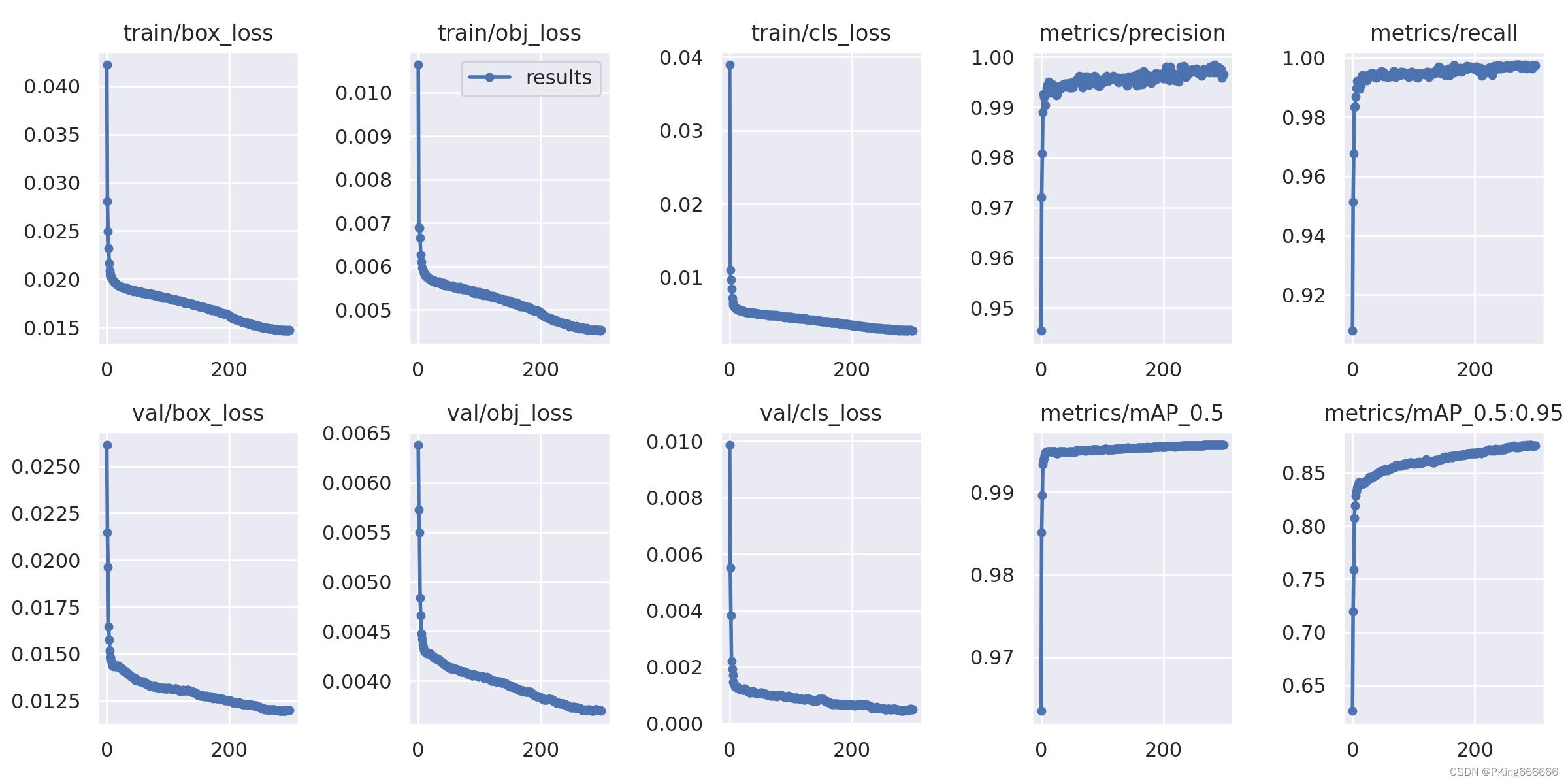
当然,在输出目录,也保存很多性能指标的图片
- 这是训练epoch的可视化图,可以看到mAP随着Epoch训练,逐渐提高
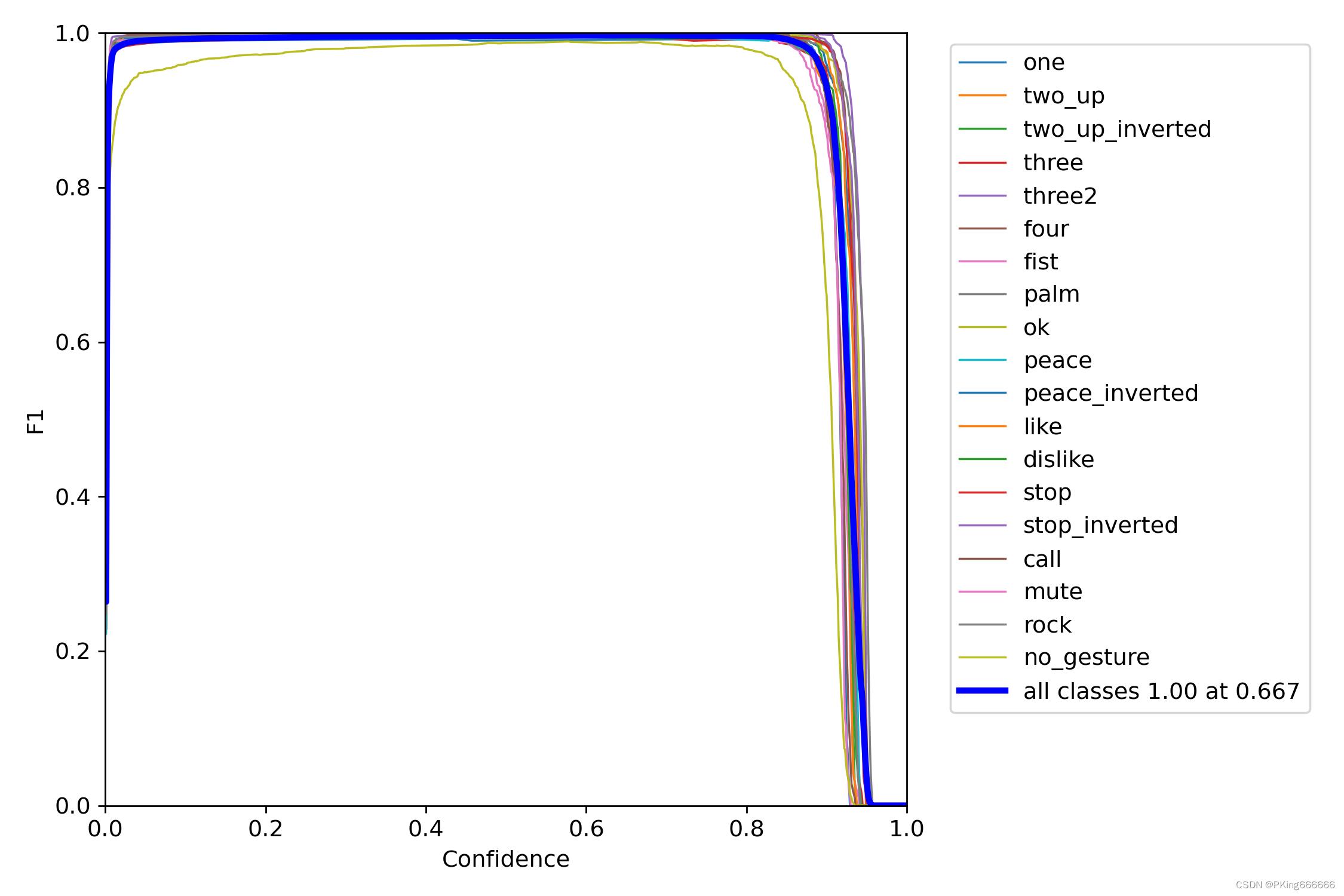
- 这是每个类别的F1-Score分数
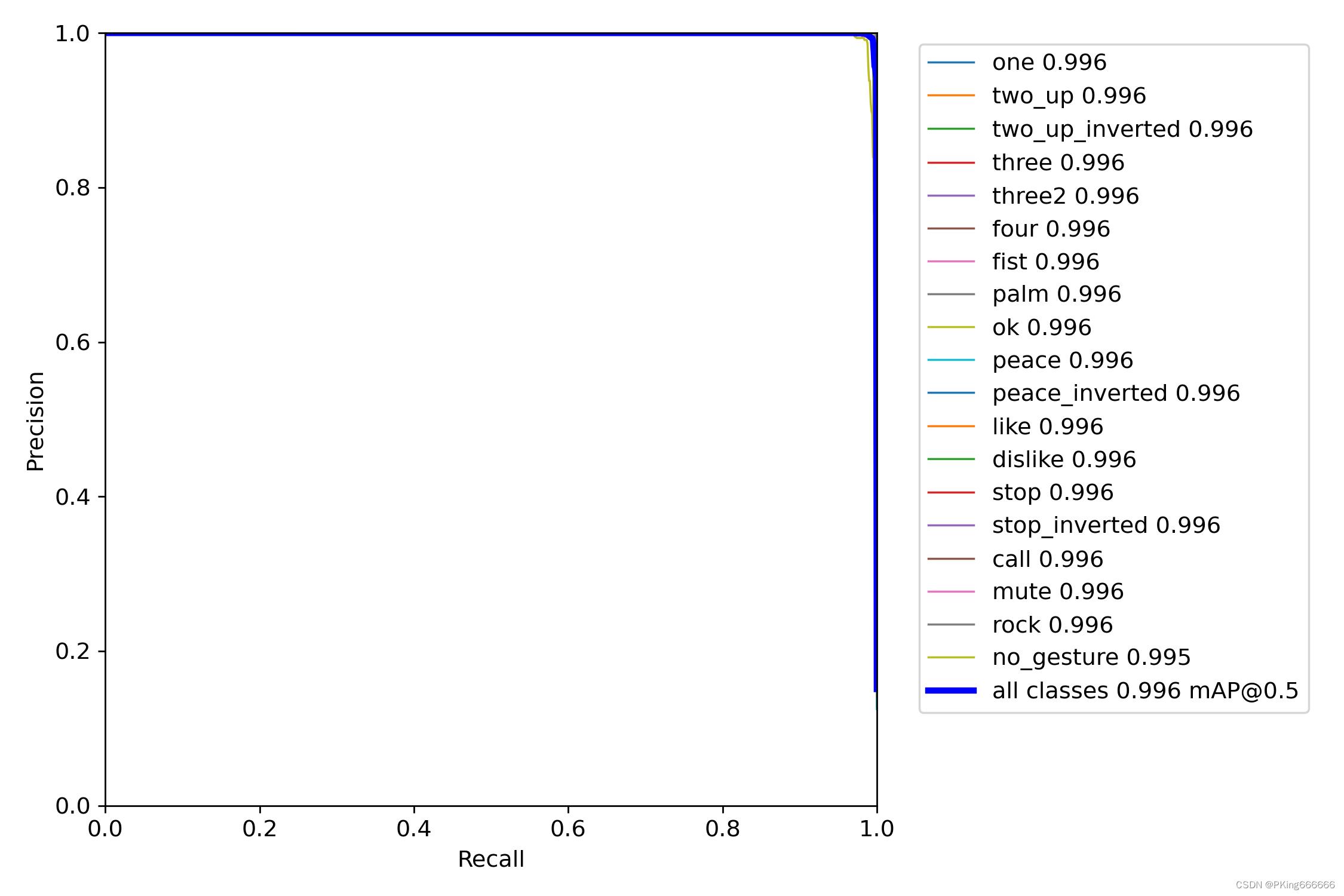
- 这是模型的PR曲线
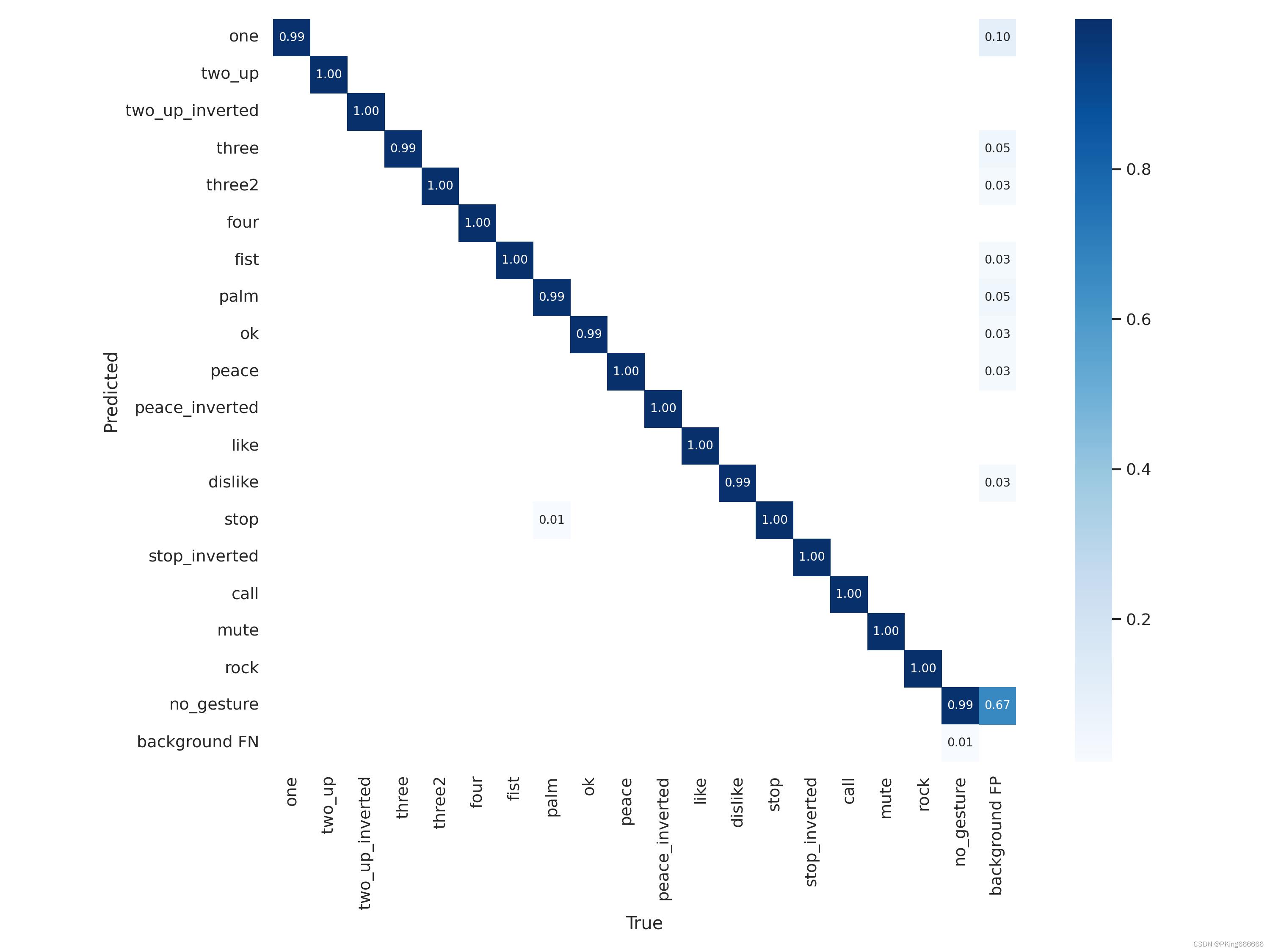
- 这是混淆矩阵:
5. Python版本手势识别测试效果
demo.py文件用于推理和测试模型的效果,填写好配置文件,模型文件以及测试图片即可运行测试了
- 测试图片
image_dir='data/HaGRID-test' # 测试图片的目录
weights="runs/yolov5s_640/weights/best.pt" # 模型文件
out_dir="runs/HaGRID-result" # 保存检测结果
python demo.py --image_dir $image_dir --weights $weights --out_dir $out_dir- 测试视频文件
# 测试视频文件
video_file="path/to/video.mp4" # 测试视频文件,如*.mp4,*.avi等
weights="runs/yolov5s_640/weights/best.pt" # 模型文件
out_dir="runs/HaGRID-result" # 保存检测结果
python demo.py --video_file $video_file --weights $weights --out_dir $out_dir
- 测试摄像头
# 测试摄像头
video_file=0 # 测试摄像头ID
weights="runs/yolov5s_640/weights/best.pt" # 模型文件
out_dir="runs/HaGRID-result" # 保存检测结果
python demo.py --video_file $video_file --weights $weights --out_dir $out_dir
测试Demo效果图:
|
|
|
如果想进一步提高模型的性能,可以尝试:
- 增加样本数据: 原始数据集,基本上都是欧美白色人的图片数据,缺乏亚洲人脸数据集,建议根据自己的业务场景,采集相关数据,提高模型泛化能力
- 使用参数量更大的模型: 本教程使用的YOLOv5s,其参数量才7.2M,而YOLOv5x的参数量有86.7M,理论上其精度更高,但推理速度也较慢。
- 尝试不同数据增强的组合进行训练
6. Android版本手势识别
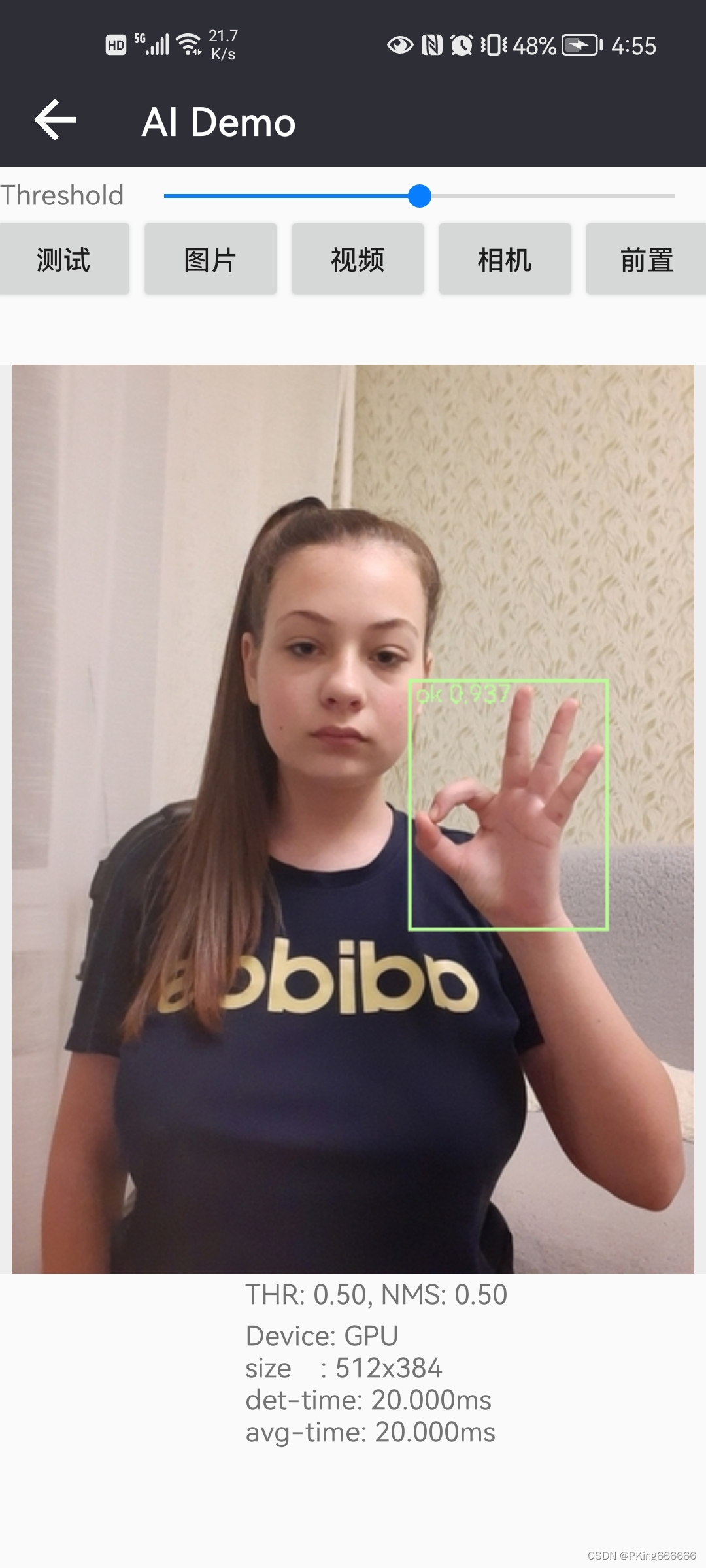
已经完成Android版本的手势识别开发,APP在普通Android手机上可以达到实时的手势识别效果,CPU(4线程)约30ms左右,GPU约25ms左右 ,基本满足业务的性能需求。
Android手部检测和手势识别(含训练代码+Android源码+手势识别数据集)_PKing666666的博客-CSDN博客
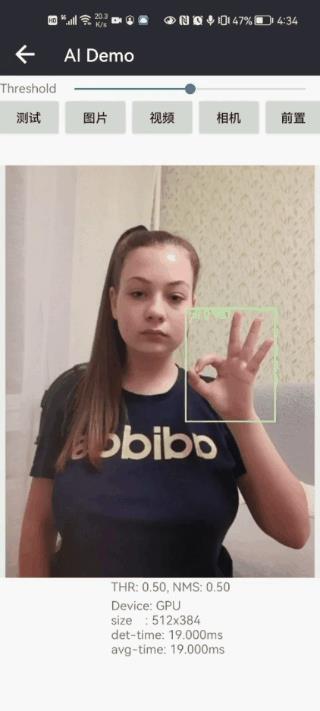
Android Demo效果:
| | |
【Android APP体验】Android实时手势动作识别APPDemo-Android文档类资源-CSDN下载
7.项目源码下载
整套项目源码内容包含Light-HaGRID数据集 + YOLOv5训练代码和测试代码:基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
(1)Light-HaGRID数据集
- 提供手势动作识别数据集,共18个手势类别,每个类别约含有7000张图片,总共123731张图片(12W+)
- 提供所有图片的json标注格式文件,即原始HaGRID数据集的标注格式
- 提供所有图片的XML标注格式文件,即转换为VOC数据集的格式
- 提供所有手势区域的图片,每个标注框的手部区域都裁剪下来,并保存在Classification文件夹下
- 可用于手势目标检测模型训练
- 可用于手势分类识别模型训练
(2)YOLOv5训练代码和测试代码(Pytorch)
- 整套YOLOv5项目工程的训练代码和测试代码
- 支持高精度版本yolov5s训练和测试
- 支持轻量化版本yolov5s05训练和测试,可以用于在Android手机实时手势识别:https://panjinquan.blog.csdn.net/article/details/126994546
- 根据本篇博文说明,简单配置即可开始训练
【源码下载】 基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
如果你需要Android版本的手势识别,请参考文章:Android手部检测和手势识别(含训练代码+Android源码+手势识别数据集)_PKing666666的博客-CSDN博客
以上是关于基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)的主要内容,如果未能解决你的问题,请参考以下文章
基于YOLOv5的手势识别系统(含手势识别数据集+训练代码)
Android手部检测和手势识别(含训练代码+Android源码+手势识别数据集)
Android手部检测和手势识别(含训练代码+Android源码+手势识别数据集)
Android实现手部检测和手势识别(含训练代码+Android源码+手势识别数据集)