EdgeX(14) :使用Intel的EVAM微服务跑通demo-app应用,可以对摄像头的数据进行stream pipline进行流处理,微服务底层使用OpenVINO组件库,可以识别自行车行人
Posted freewebsys
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了EdgeX(14) :使用Intel的EVAM微服务跑通demo-app应用,可以对摄像头的数据进行stream pipline进行流处理,微服务底层使用OpenVINO组件库,可以识别自行车行人相关的知识,希望对你有一定的参考价值。
目录
前言
相关EdgeX Foundry 全部分类:
https://blog.csdn.net/freewebsys/category_9437788.html
本文的原文连接是:
https://blog.csdn.net/freewebsys/article/details/127456918
未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,关于EVAM
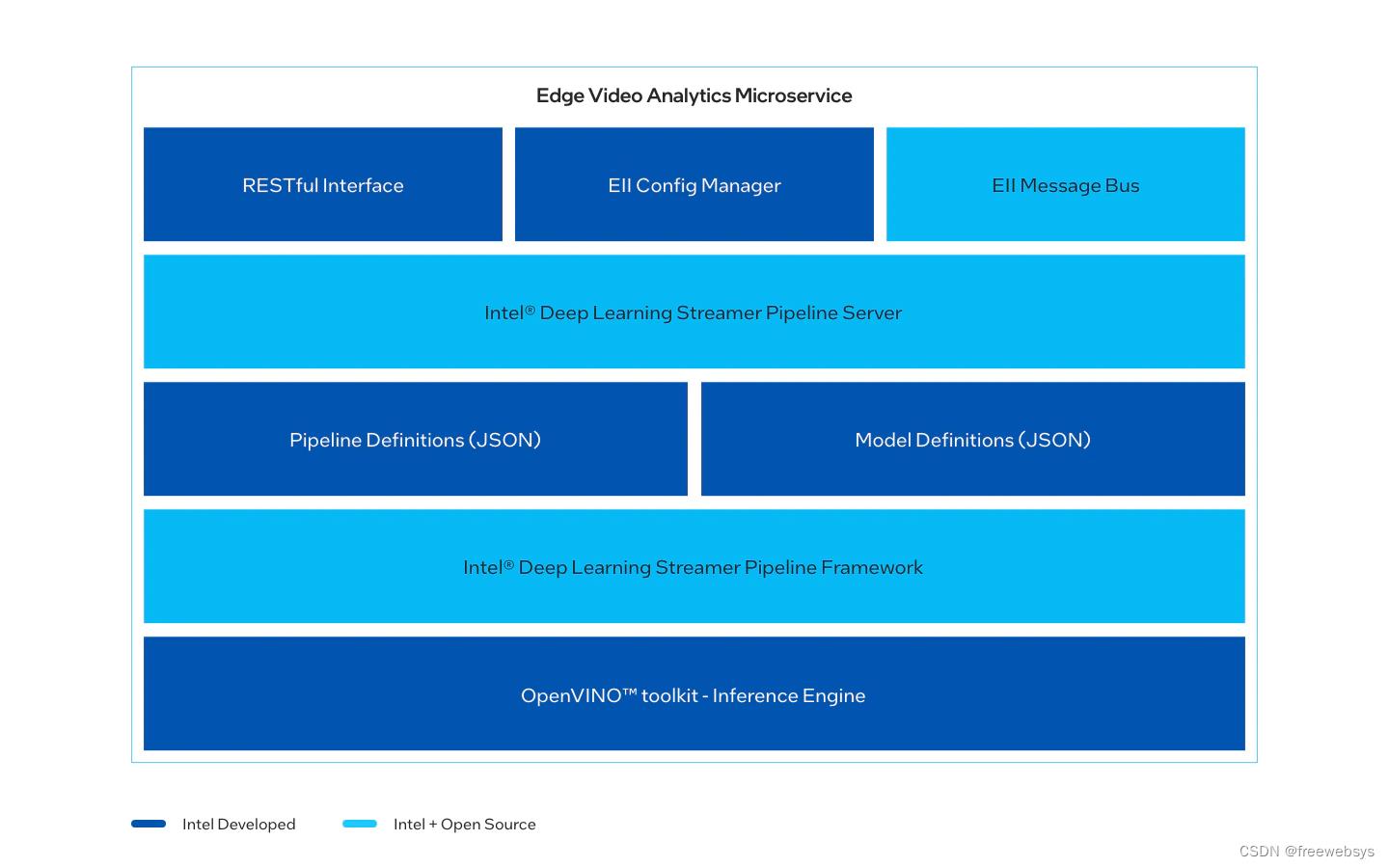
是Intel 开发的组件库 Edge Video Analytics Microservice,边缘端的视频分析微服务。
官方网站:
https://www.intel.com/content/www/us/en/developer/articles/technical/video-analytics-service.html
github地址:
https://github.com/intel/edge-video-analytics-microservice
Docker Hub 地址:
https://hub.docker.com/r/intel/edge_video_analytics_microservice
版本区别:
0.7.2 Aligned with Intel® Deep Learning Streamer Pipeline Server 2022.1.1 release.
0.7.0 Initial release using Intel® Distribution of OpenVINO™ Toolkit 2021.4.2
当然使用 个 2022 版本的。
架构图,底层是OpenVINO的引擎,然后是Intel的深度学习框架,上面是Pipline和模型,然后是Streamer Pipeline 服务。在上面就是应用层。
2,配置EVAM的docker-compose服务
之前已经研究过一遍使用源码的方式自己编译docker镜像然后跑起来。
也可以成功:
https://blog.csdn.net/freewebsys/article/details/126230258?spm=1001.2014.3001.5501
就是构建速度慢,下载好多东西。这次直接使用镜像做服务:
docker-compose.yml
networks:
edgex-network:
driver: bridge
services:
broker:
image: eclipse-mosquitto
hostname: mqtt
container_name: mqtt-broker
volumes:
- ./mosquitto_conf:/mosquitto/config
ports:
- "1883:1883"
- "59001:9001"
networks:
- edgex-network
video-analytics-microservice:
image: intel/edge_video_analytics_microservice:0.7.2
hostname: edgex-video-analytics-microservice
container_name: edgex-video-analytics-microservice
privileged: true
tty: true
entrypoint: ["./run.sh"]
ports:
- '8080:8080'
- '8554:8554'
networks:
- edgex-network
environment:
- ENABLE_RTSP=true
- RTSP_PORT=8554
- ENABLE_WEBRTC=true
- WEBRTC_SIGNALING_SERVER=ws://localhost:59001
- RUN_MODE=EVA
# Default Detection and Classification Device
- DETECTION_DEVICE=CPU
- CLASSIFICATION_DEVICE=CPU
- WRITABLE_INSECURESECRETS_CAMERACREDENTIALS_SECRETS_USERNAME=admin
- WRITABLE_INSECURESECRETS_CAMERACREDENTIALS_SECRETS_PASSWORD=yhy363tp
device_cgroup_rules:
# Default run - device-cgroup-rule='c 189:* rmw'
# NCS2 run - device-cgroup-rule='c 209:* rmw'
# Selective rules can be applied for deployment
- 'c 189:* rmw'
- 'c 209:* rmw'
devices:
# Following devices under /dev filesystem will be needed based on usecase
# dri - GPU
# ion - VPU
# USB camera devices
# Selective mount can be done for deployment as mounting whole /dev is not recommended
- "/dev:/dev"
version: '3.7'
在当前目录创建 mosquitto_conf/mosquitto.conf
需要再配置下 broker 的端口:开启 websocket服务
#
# Copyright (C) 2022 Intel Corporation
#
# SPDX-License-Identifier: Apache-2.0
allow_anonymous true
listener 1883
log_type error
log_type warning
log_type notice
log_type information
log_type subscribe
log_type unsubscribe
log_type websockets
listener 9001
protocol websockets
然后就可以启动服务了
docker-compose up -d
4,创建摄像头应用,启动web服务,端口 59750
首先下载 edgex examples 项目
$ git clone https://github.com/edgexfoundry/edgex-examples.git
# 切换到 camera management 项目
$ cd edgex-examples/application-services/custom/camera-management/
配置摄像头凭证文件。输入账号密码。
$ vi res/configuration.toml
# 设置账号密码
# TODO: Enter your camera's credentials here.
# NOTE: currently this solution is limited to supporting only 1 username/password combination
# for ALL cameras. In the future when then device-onvif-camera service is able to provide
# us with pre-authenticated uris, this can be removed.
[Writable.InsecureSecrets.CameraCredentials]
path = "CameraCredentials"
[Writable.InsecureSecrets.CameraCredentials.Secrets]
username = "admin"
password = "password"
需要golang 环境:
https://golang.google.cn/doc/install
首先删除之前的老版本的文件,然后在解压缩到/usr/local目录下面:需要root权限
$ sudo rm -rf /usr/local/go && sudo tar -C /usr/local -xzf go1.19.2.linux-amd64.tar.gz
$ vi $HOME/.bashrc
增加环境变量
# add golang
export PATH=$PATH:/data/local/go/bin
# 增加代理,下载提速
export GO111MODULE=on
export GOPROXY=https://goproxy.cn
测试
$ go version
go version go1.19.2 linux/amd64
安装工具和依赖:
# 需要安装工具 pkg-config
$ sudo apt install pkg-config
# 安装 zeromq 依赖开发工具包:
$ sudo apt-get install libzmq3-dev
执行构建,没有任何问题代表构建成功!
$ make build-app
go mod tidy
CGO_ENABLED=1 go build -ldflags "-X github.com/edgexfoundry/app-functions-sdk-go/v2/internal.SDKVersion=v2.2.0 -X github.com/edgexfoundry/app-functions-sdk-go/v2/internal.ApplicationVersion=0.0.0" -o app-camera-management
$ make run-app
EDGEX_SECURITY_SECRET_STORE=false ./app-camera-management
.....
level=INFO ts=2022-10-19T08:31:46.13384954Z app=app-camera-management source=service.go:202 msg="StoreAndForward disabled. Not running retry loop."
level=INFO ts=2022-10-19T08:31:46.133856645Z app=app-camera-management source=service.go:205 msg="Camera Management Application Service has started"
level=INFO ts=2022-10-19T08:31:46.133863725Z app=app-camera-management source=server.go:162 msg="Starting HTTP Web Server on address 0.0.0.0:59750"
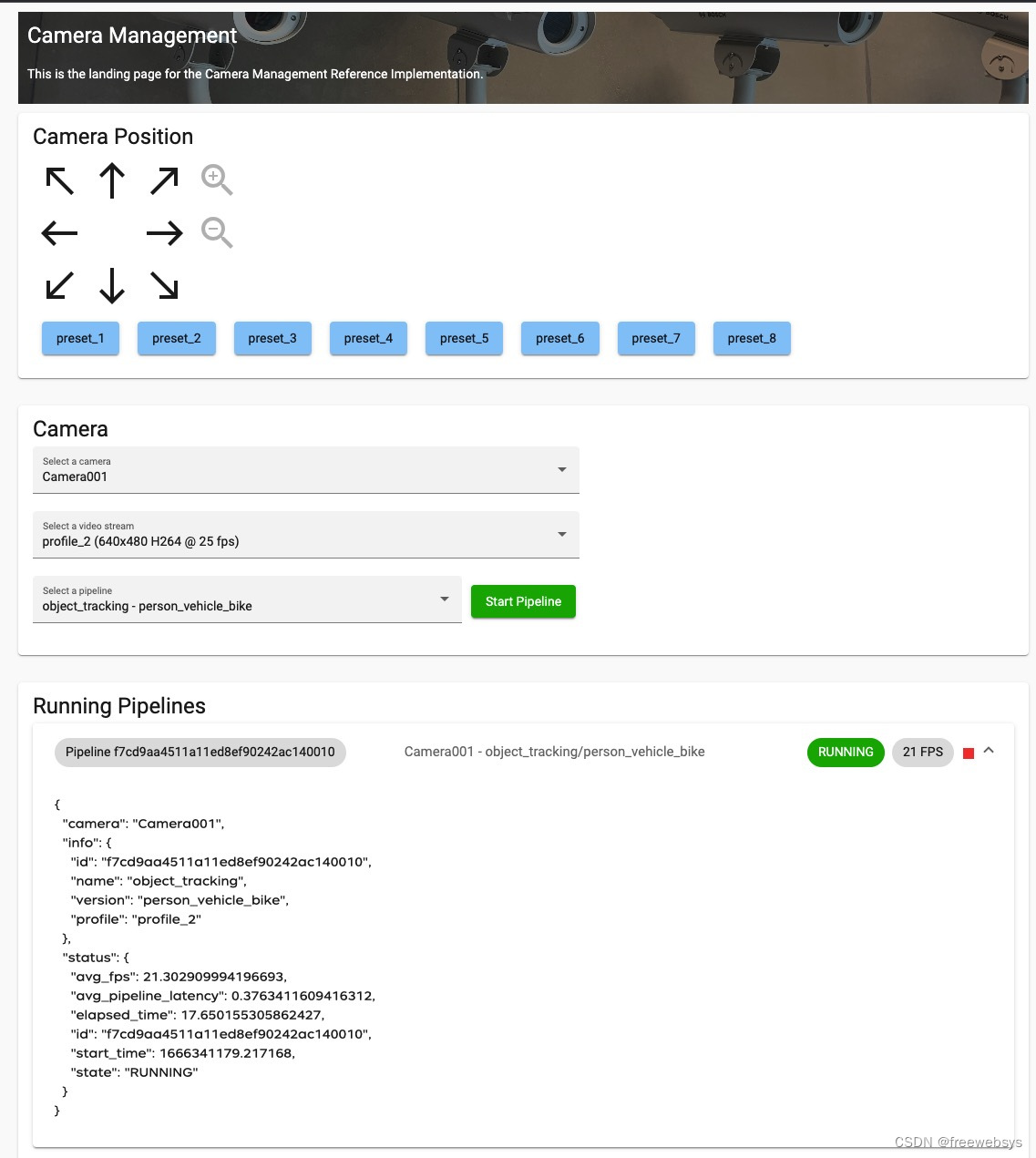
4,启动成功进入web界面
特别需要注意的是这个分辨率。
2304x1296 H264 @ 25 fps
640x480 H264 @ 25 fps
选择下面的640 分辨率,否则太高了,会报错,Picture size 0x0 is invalid
不能查看摄像的实时处理结果了
Input #0, rtsp, from 'rtsp://localhost:8554/Camera001':
Metadata:
title : Session streamed with GStreamer
comment : rtsp-server
Duration: N/A, start: 0.000000, bitrate: N/A
Stream #0:0: Video: mjpeg (Baseline), none(bt470bg/unknown/unknown), 90k tbr, 90k tbn, 90k tbc
[mjpeg @ 0x7f5e4000b480] [IMGUTILS @ 0x7f5e3bffdcd0] Picture size 0x0 is invalid
Last message repeated 18 times
[mjpeg @ 0x7f5e4000b480] [IMGUTILS @ 0x7f5e3bffdcd0] Picture size 0x0 is invalid
实时查看流结果地址。就是带框框的视频流。
# 需要安装 ffmpeg #
sudo apt install ffmpeg
ffplay -rtsp_transport tcp rtsp://localhost:8554/Camera001
在工位,没有车辆行人的视频,用截图代替了。


3,总结
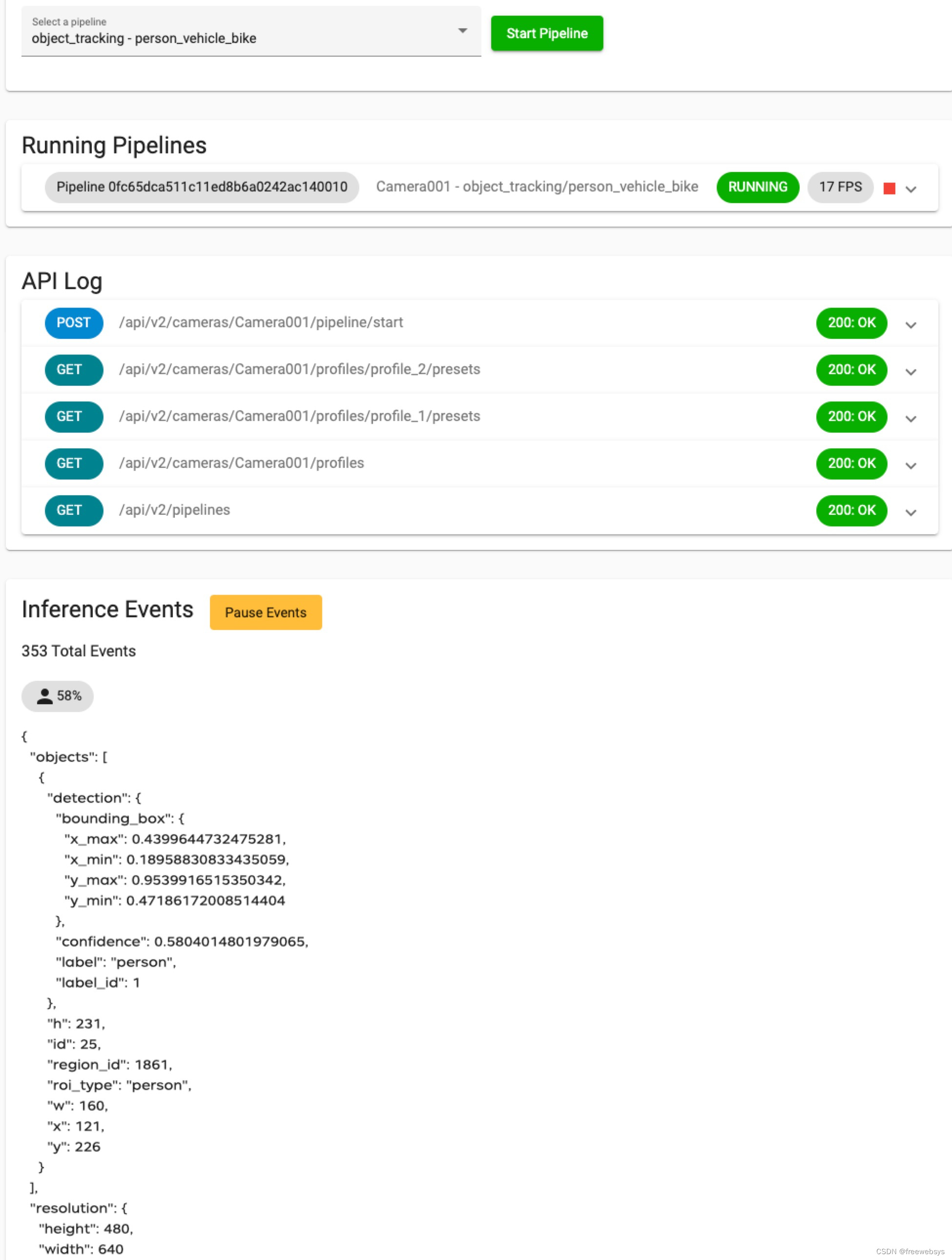
使用Intel的 EVAM 微服务,创建OpenVINO的目标检测跟踪服务,并成功接受到相关坐标数据。
这个官方例子还是非常的丰富的。稍作修改下就可以应用到项目当中了,已经把相关的目标检测模型都放到 OpenVINO 中,
封装成一个docker 服务器启动了。整个流程也通过配置下就可以了。
非常的方便、简单、高效的边缘演示服务!
本文的原文连接是:
https://blog.csdn.net/freewebsys/article/details/127456918
博主地址是:https://blog.csdn.net/freewebsys

以上是关于EdgeX(14) :使用Intel的EVAM微服务跑通demo-app应用,可以对摄像头的数据进行stream pipline进行流处理,微服务底层使用OpenVINO组件库,可以识别自行车行人的主要内容,如果未能解决你的问题,请参考以下文章