GitHub 开源分享 | PointRCNN - 第一个基于原始点云的两阶段3D目标检测
Posted J-A
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GitHub 开源分享 | PointRCNN - 第一个基于原始点云的两阶段3D目标检测相关的知识,希望对你有一定的参考价值。
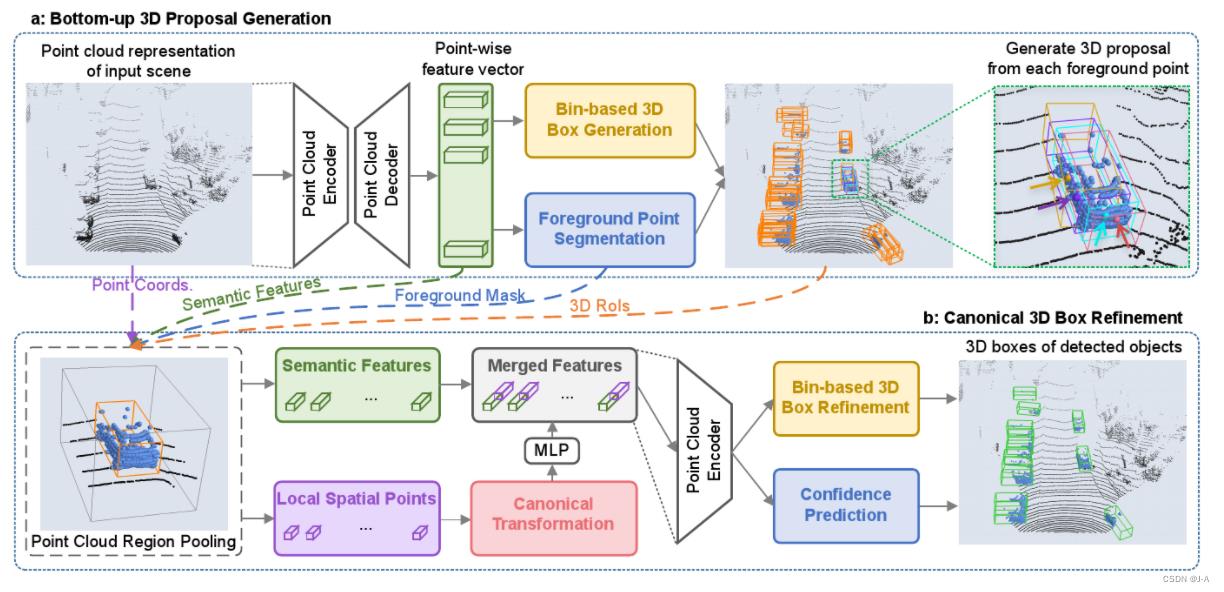
目前作者公布的代码只能对一个类别做检测,假设这个类就是“车”,这也是KITTI数据集中标注最多的类,这个目标检测方法分两个阶段:
(1)第一阶段:生成一大堆很冗余的bounding box。首先,对点云语义分割,对每个点的到一个预测label,比如现在:对所有判断是“车”的点(也叫做前景点),赋予label=1,其他点(也叫做背景点),赋予label=0。
然后,用所有前景点生成bounding box,一个前景点对应一个bounding box。但是必须要保证语义分割结果的准确。然后作者使用了一些去除冗余的方法,继续减少bounding box的数目,这一阶段结束的时候只留下300个bounding box。
(2)第二阶段:继续优化上一阶段生成的bounding box。首先,对前一阶段生成的bounding box做旋转平移,把这些bounding box转换到自己的正规划坐标系下(canonical coordinates)。结合上然后,通过点云池化等操作的到每个bounding box的特征,再结合第一阶段的到的特征,进行bounding box的修正和置信度的打分,从而得到最终的bounding box。
以上是关于GitHub 开源分享 | PointRCNN - 第一个基于原始点云的两阶段3D目标检测的主要内容,如果未能解决你的问题,请参考以下文章