计算机视觉算法——基于Transformer的目标检测(DETR / Deformable DETR / DETR 3D)
Posted Leo-Peng
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了计算机视觉算法——基于Transformer的目标检测(DETR / Deformable DETR / DETR 3D)相关的知识,希望对你有一定的参考价值。
计算机视觉算法——基于Transformer的目标检测(DETR / Deformable DETR / DETR 3D)
计算机视觉算法——基于Transformer的目标检测(DETR / Deformable DETR / DETR 3D)
DETR是DEtection TRansformer的缩写,该方法发表于2020年ECCV,原论文名为《End-to-End Object Detection with Transformers》。
传统的目标检测是基于Proposal、Anchor或者None Anchor的方法,并且至少需要非极大值抑制来对网络输出的结果进行后处理,涉及到复杂的调参过程。而DETR使用了Transformer Encoder-Decoder的结构,并且通过集合预测损失实现了真正意义上的端到端的目标检测方法。Transformer Encoder-Decoder是怎么实现的?集合预测损失是什么?后文具体介绍。
对于目标检测方向不是很了解的同学可以参考计算机视觉算法——目标检测网络总结。
1. DETR
DETR网络结构如下图所示:
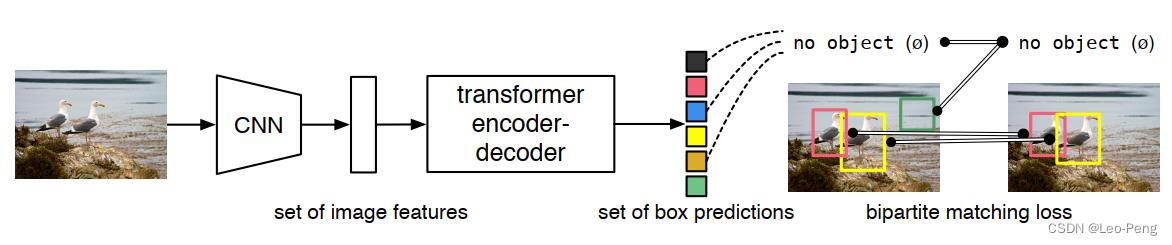
首先第一步是通过一个CNN对输入图片抽取特征,然后将特征图拉直输入Transformer Encoder-Decoder。第二步的Transformer Encoder部分就是使得网络更好地去学习全局的特征;第三步使用Transformer Decoder以及Object Query从特征中学习要检测的物体;第四步就是将Object Query的结果和真值进行二分图匹配(Set-to-Set Loss),最后在匹配上的结果上计算分类Loss和位置回归Loss。
以上是训练的基本过程,推理过程唯一的区别就是在第四步,第四步通过对Object Query设置一个阈值来输出最终检测的结果,这个结果不再需要进行进行任何后处理,而是直接作为最终的输出。
下面我们结合代码具体展开Transformer Encoder-Decoder和Set-to-Set Loss的细节:
1.1 Transformer Encoder-Decoder
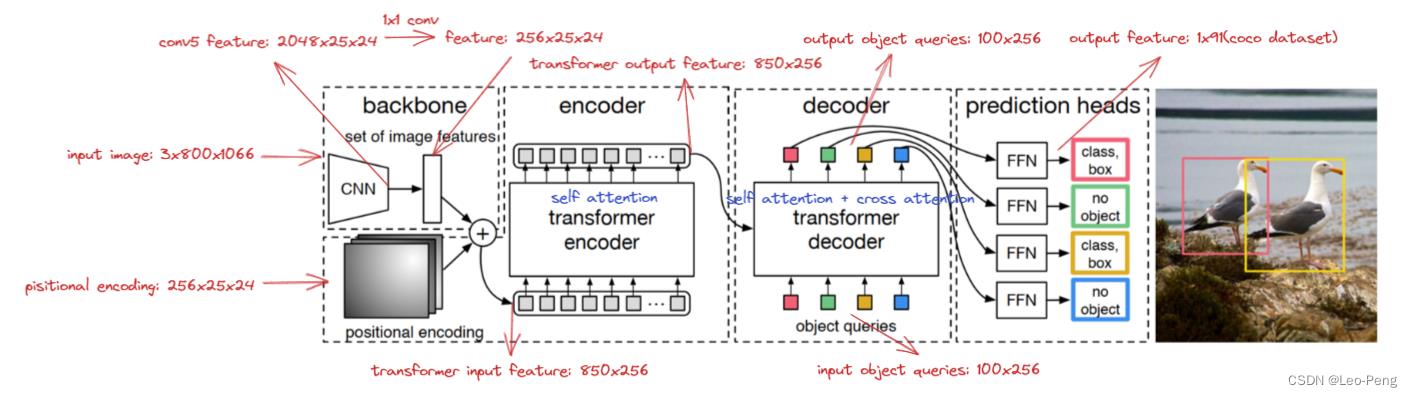
Transformer Encoder-Decoder结构如下图所示,其中红色注释为输入为
3
×
800
×
1066
3\\times 800\\times 1066
3×800×1066大小的图片后各个步骤Feature大小。
Transformer Encoder-Decoder的forward函数如下:
def forward(self, src, mask, query_embed, pos_embed):
# flatten NxCxHxW to HWxNxC
bs, c, h, w = src.shape
src = src.flatten(2).permute(2, 0, 1)
pos_embed = pos_embed.flatten(2).permute(2, 0, 1)
query_embed = query_embed.unsqueeze(1).repeat(1, bs, 1)
mask = mask.flatten(1)
tgt = torch.zeros_like(query_embed)
memory = self.encoder(src, src_key_padding_mask=mask, pos=pos_embed)
hs = self.decoder(tgt, memory, memory_key_padding_mask=mask,
pos=pos_embed, query_pos=query_embed)
return hs.transpose(1, 2), memory.permute(1, 2, 0).view(bs, c, h, w)
其中
src为Backbone抽取后的特征,输入Encoder前需要先对其进行展平处理;
pos_embed为位置编码,在DETR中位置编码是一个值固定的位置编码,具体参见下文有1.3中的介绍;
query_embed是一个可学习的位置编码,也就是上文体到的Object Query,其作用在Decoder中就是通过Encoder后的Feature和query_embed不断做Cross Attention,最query_embed的每一维就是一个检测结果的输出;
mask是DETR为了兼容不同分辨率图像作为输入,会在输入时将不同分别的图像Zero Padding成固定分辨率,Zero Padding部分不包含任何信息,因此不能用来计算Attention,因此作者在这里保留将Zero Padding部分传入了src_key_padding_mask。
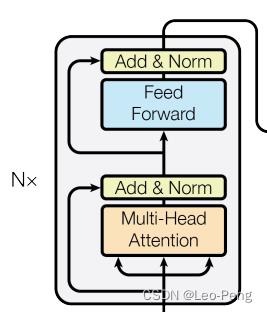
接下来的Encoder-Decoder部分和《Attention is All You Need》中几乎一致,Encoder层结构如下图所示:
 代码如下:
代码如下:
def forward_post(self,
src,
src_mask: Optional[Tensor] = None,
src_key_padding_mask: Optional[Tensor] = None,
pos: Optional[Tensor] = None):
q = k = self.with_pos_embed(src, pos)
src2 = self.self_attn(q, k, value=src, attn_mask=src_mask,
key_padding_mask=src_key_padding_mask)[0]
src = src + self.dropout1(src2)
src = self.norm1(src)
src2 = self.linear2(self.dropout(self.activation(self.linear1(src))))
src = src + self.dropout2(src2)
src = self.norm2(src)
return src
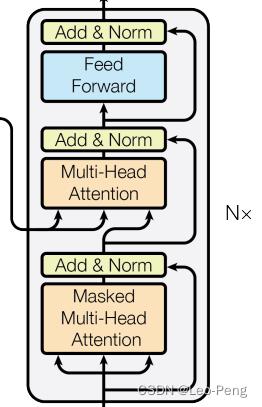
Decoder结构如下图所示:
 代码如下:
代码如下:
def forward_post(self, tgt, memory,
tgt_mask: Optional[Tensor] = None,
memory_mask: Optional[Tensor] = None,
tgt_key_padding_mask: Optional[Tensor] = None,
memory_key_padding_mask: Optional[Tensor] = None,
pos: Optional[Tensor] = None,
query_pos: Optional[Tensor] = None):
q = k = self.with_pos_embed(tgt, query_pos)
tgt2 = self.self_attn(q, k, value=tgt, attn_mask=tgt_mask,
key_padding_mask=tgt_key_padding_mask)[0]
tgt = tgt + self.dropout1(tgt2)
tgt = self.norm1(tgt)
tgt2 = self.multihead_attn(query=self.with_pos_embed(tgt, query_pos),
key=self.with_pos_embed(memory, pos),
value=memory, attn_mask=memory_mask,
key_padding_mask=memory_key_padding_mask)[0]
tgt = tgt + self.dropout2(tgt2)
tgt = self.norm2(tgt)
tgt2 = self.linear2(self.dropout(self.activation(self.linear1(tgt))))
tgt = tgt + self.dropout3(tgt2)
tgt = self.norm3(tgt)
return tgt
这里有个细节,除了第一层之外,query_embed在做Cross Attention之前,都需必须要做一次Self Attention,Self-Attention各个Query了解其他Query掌握的信息。
最后总结下,Transformer Encoder-Decoder有什么好处呢?
我觉得Transformer Encoder-Decoder应该是Set-to-Set成功的原因之一,在DETR之前其实也有一些文章提出Set-to-Set的想法,但是由于网络使用的Backbone不够强,因此并没有取得很好的效果。而Transformer Encoder-Decoder学习的是全局的特征,它可以使得其中某一个特征与全局里的其他特征都有了交互,网络就能更加清楚的知道哪里是一个物体,哪里是另外一个物体,一个物体应该就是对应一个输出,这也就更加符合Set-to-Set的假设。
1.2 Set-to-Set Loss
所谓Set-to-Set Loss就是将在计算网络损失前加一个二分图匹配的过程,使得最后预测结果只和匹配上的真值计算损失,如下公式所示: σ ^ = arg min σ ∈ S N ∑ i N L match ( y i , y ^ σ ( i ) ) \\hat\\sigma=\\underset\\sigma \\in \\mathfrakS_N\\arg \\min \\sum_i^N \\mathcalL_\\operatornamematch\\left(y_i, \\haty_\\sigma(i)\\right) σ^=σ∈SNargmini∑NLmatch(yi,y^σ(i))其中 y i y_i yi为真值, y ^ σ ( i ) \\haty_\\sigma(i) y^σ(i)为预测值, L match \\mathcalL_\\operatornamematch Lmatch为二分图匹配算法,对二分图匹配不熟悉的同学可以参考视觉SLAM总结——SuperPoint / SuperGlue中的介绍,区别是,在DETR代码码实现中调用的是scipy库中的linear_sum_assignment函数,该函数输入一个 M × N M\\times N M×N大小的Cost矩阵能计算 M M M和 N N N之间的匹配关系,在DETR中Cost矩阵由分类损失 p ^ σ ( i ) ( c i ) \\hatp_\\sigma(i)\\left(c_i\\right) p^σ(i)(ci)和Box损失 L b o x ( b i , b ^ σ ( i ) ) \\mathcalL_\\mathrmbox\\left(b_i, \\hatb_\\sigma(i)\\right) Lbox(bi,b^σ(i))两部分构成,分类损失为负的Softmax后的概率,Box损失为L1损失和Generalized IOU损失两部分构成如下:
def forward(self, outputs, targets):
""" Performs the matching
Params:
outputs: This is a dict that contains at least these entries:
"pred_logits": Tensor of dim [batch_size, num_queries, num_classes] with the classification logits
"pred_boxes": Tensor of dim [batch_size, num_queries, 4] with the predicted box coordinates
targets: This is a list of targets (len(targets) = batch_size), where each target is a dict containing:
"labels": Tensor of dim [num_target_boxes] (where num_target_boxes is the number of ground-truth
objects in the target) containing the class labels
"boxes": Tensor of dim [num_target_boxes, 4] containing the target box coordinates
Returns:
A list of size batch_size, containing tuples of (index_i, index_j) where:
- index_i is the indices of the selected predictions (in order)
- index_j is the indices of the corresponding selected targets (in order)
For each batch element, it holds:
len(index_i) = len(index_j) = min(num_queries, num_target_boxes)
"""
bs, num_queries = outputs["pred_logits"].shape[:2]
# We flatten to compute the cost matrices in a batch
out_prob = outputs["pred_logits"].flatten(0, 1).softmax(-1) # [batch_size * num_queries, num_classes]
out_bbox = outputs["pred_boxes"].flatten(0, 1) # [batch_size * num_queries, 4]
# Also concat the target labels and boxes
tgt_ids = torch.cat([v["labels"] for v in targets])
tgt_bbox = torch.cat([v["boxes"] for v in targets])
# Compute the classification cost. Contrary to the loss, we don't use the NLL,
# but approximate it in 1 - proba[target class].
# The 1 is a constant that doesn't change the matching, it can be ommitted.
cost_class = -out_prob[:, tgt_ids]
# Compute the L1 cost between boxes
cost_bbox = torch.cdist(out_bbox, tgt_bbox, p=1)
# Compute the giou cost betwen boxes
cost_giou = -generalized_box_iou(box_cxcywh_to_xyxy(out_bbox), box_cxcywh_to_xyxy(tgt_bbox))
# Final cost matrix
C = self.cost_bbox * cost_bbox + self.cost_class * cost_class + self.cost_giou * cost_giou
C = C.view(bs, num_queries, -1).cpu()
sizes = [len(v["boxes"]) for v in targets]
indices = [linear_sum_assignment(c[i]) for i, c in enumerate(C.split(sizes, -1))]
return [(torch.as_tensor(i, dtype=torch.int64), torch.as_tensor(j, dtype=torch.int64)) for i, j in indices]
在求得匹配结果 σ ^ \\hat\\sigma σ^后最终的损失大小为: L Hungarian ( y , y ^ ) = ∑ i = 1 N [ − log p ^ σ ^ ( i ) ( c i ) + 1 c i ≠ ∅ L b o x ( b i , b ^ σ ^ ( i ) ) ] \\mathcalL_\\text Hungarian (y, \\haty)=\\sum_i=1^N\\left[-\\log \\hatp_\\hat\\sigma(i)\\left(c_i\\right)+\\mathbb1_\\left\\c_i \\neq \\varnothing\\right\\ \\mathcalL_\\mathrmbox\\left(b_i, \\hatb_\\hat\\sigma(i)\\right)\\right] LHungarian (y,y^)=i=1∑N[−logp^σ^(i)(ci)+1ci=∅Lbox(bi,b以上是关于计算机视觉算法——基于Transformer的目标检测(DETR / Deformable DETR / DETR 3D)的主要内容,如果未能解决你的问题,请参考以下文章