SX1281驱动学习笔记一:Lora驱动移植
Posted 无痕幽雨
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了SX1281驱动学习笔记一:Lora驱动移植相关的知识,希望对你有一定的参考价值。
目录
一、资料下载
最近要用SX1281做一款产品,把学习过程记录下,以便后期查阅。
1、中文手册下载地址:
DS_SX1280-1-2_V3.0_SC.zip_sx1280中文手册-其它文档类资源-CSDN下载
2、英文手册下载地址:
SX1281 | 长距离低功耗 2.4 GHz 射频收发器 | Semtech
3、固件下载地址:
SX1281 | 长距离低功耗 2.4 GHz 射频收发器 | Semtech

4、SX1281的速率计算器下载地址:
SX1280 | 长距离低功耗 2.4 GHz 射频收发器 | Semtech
5、SX128X区别:

SX1281不支持测距功能;SX1280支持普通测试功能,不支持高级测距功能;SX1282支持普通测距和高级测距功能。如果仅仅用作数据传输,三款芯片没有区别。
二、驱动讲解
下载SX1281DemoCodeDriver-C.zip固件包,解压缩后,打开工程,环境如下:
1)软件:MDK V5;
2)MCU型号:STM32L476RGTx;
3)固件版本为:Firmware Version: 170919A;
工程如下图所示:
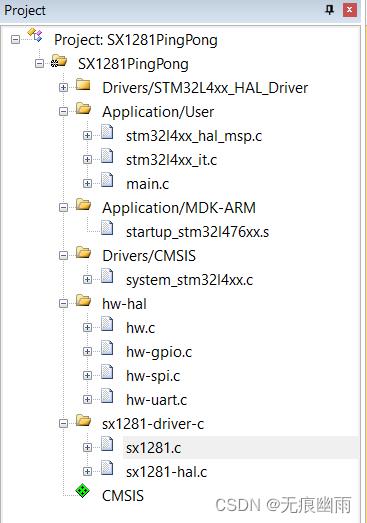
和SX1281相关文件如下图所示,一共5个文件:

1、radio.h文件
其中radio.h为接口抽象文件,把和SX128X相关操作,全部抽象为API接口,官方提供,无需更改。
struct Radio_s
/*!
* \\brief Initializes the radio
*
* \\param [IN] callbacks Structure containing the driver callback functions
*/
void ( *Init )( RadioCallbacks_t *callbacks );
/*!
* \\brief Resets the radio
*/
void ( *Reset )( void );
/*!
* \\brief Gets the current radio status
*
* \\retval status Radio status
*/
Radiostatus_t ( *GetStatus )( void );
/*!
* \\brief Writes the given command to the radio
*
* \\param [in] opcode Command opcode
* \\param [in] buffer Command parameters byte array
* \\param [in] size Command parameters byte array size
*/
void ( *WriteCommand )( RadioCommands_t opcode, uint8_t *buffer, uint16_t size );
/*!
* \\brief Reads the given command from the radio
*
* \\param [in] opcode Command opcode
* \\param [in] buffer Command parameters byte array
* \\param [in] size Command parameters byte array size
*/
void ( *ReadCommand )( RadioCommands_t opcode, uint8_t *buffer, uint16_t size );
/*!
* \\brief Writes multiple radio registers starting at address
*
* \\param [in] address First Radio register address
* \\param [in] buffer Buffer containing the new register's values
* \\param [in] size Number of registers to be written
*/
void ( *WriteRegisters )( uint16_t address, uint8_t *buffer, uint16_t size );
/*!
* \\brief Writes the radio register at the specified address
*
* \\param [in] address Register address
* \\param [in] value New register value
*/
void ( *WriteRegister )( uint16_t address, uint8_t value );
/*!
* \\brief Reads multiple radio registers starting at address
*
* \\param [in] address First Radio register address
* \\param [out] buffer Buffer where to copy the registers data
* \\param [in] size Number of registers to be read
*/
void ( *ReadRegisters )( uint16_t address, uint8_t *buffer, uint16_t size );
/*!
* \\brief Reads the radio register at the specified address
*
* \\param [in] address Register address
*
* \\retval value The register value
*/
uint8_t ( *ReadRegister )( uint16_t address );
/*!
* \\brief Writes Radio Data Buffer with buffer of size starting at offset.
*
* \\param [in] offset Offset where to start writing
* \\param [in] buffer Buffer pointer
* \\param [in] size Buffer size
*/
void ( *WriteBuffer )( uint8_t offset, uint8_t *buffer, uint8_t size );
/*!
* \\brief Reads Radio Data Buffer at offset to buffer of size
*
* \\param [in] offset Offset where to start reading
* \\param [out] buffer Buffer pointer
* \\param [in] size Buffer size
*/
void ( *ReadBuffer )( uint8_t offset, uint8_t *buffer, uint8_t size );
/*!
* \\brief Gets the current status of the radio DIOs
*
* \\retval status [Bit #3: DIO3, Bit #2: DIO2,
* Bit #1: DIO1, Bit #0: BUSY]
*/
uint8_t ( *GetDioStatus )( void );
/*!
* \\brief Return firmware version
*
* \\retval firmware The firmware version
*/
uint16_t ( *GetFirmwareVersion )( void );
/*!
* \\brief Sets the power regulators operating mode
*
* \\param [in] mode [0: LDO, 1:DC_DC]
*/
void ( *SetRegulatorMode )( RadioRegulatorModes_t mode );
/*!
* \\brief Sets the radio in configuration mode
*
* \\param [in] mode The standby mode to put the radio into
*/
void ( *SetStandby )( RadioStandbyModes_t mode );
/*!
* \\brief Sets the radio for the given protocol
*
* \\param [in] packetType [PACKET_TYPE_GFSK, PACKET_TYPE_LORA,
* PACKET_TYPE_FLRC, PACKET_TYPE_BLE]
*
* \\remark This method has to be called before SetRfFrequency,
* SetModulationParams and SetPacketParams
*/
void ( *SetPacketType )( RadioPacketTypes_t packetType );
/*!
* \\brief Set the modulation parameters
*
* \\param [in] modParams A structure describing the modulation parameters
*/
void ( *SetModulationParams )( ModulationParams_t *modParams );
/*!
* \\brief Sets the packet parameters
*
* \\param [in] packetParams A structure describing the packet parameters
*/
void ( *SetPacketParams )( PacketParams_t *packetParams );
/*!
* \\brief Sets the RF frequency
*
* \\param [in] frequency RF frequency [Hz]
*/
void ( *SetRfFrequency )( uint32_t frequency );
/*!
* \\brief Sets the data buffer base address for transmission and reception
*
* \\param [in] txBaseAddress Transmission base address
* \\param [in] rxBaseAddress Reception base address
*/
void ( *SetBufferBaseAddresses )( uint8_t txBaseAddress, uint8_t rxBaseAddress );
/*!
* \\brief Sets the transmission parameters
*
* \\param [in] power RF output power [-18..13] dBm
* \\param [in] rampTime Transmission ramp up time
*/
void ( *SetTxParams )( int8_t power, RadioRampTimes_t rampTime );
/*!
* \\brief Sets the IRQ mask and DIO masks
*
* \\param [in] irqMask General IRQ mask
* \\param [in] dio1Mask DIO1 mask
* \\param [in] dio2Mask DIO2 mask
* \\param [in] dio3Mask DIO3 mask
*/
void ( *SetDioIrqParams )( uint16_t irqMask, uint16_t dio1Mask, uint16_t dio2Mask, uint16_t dio3Mask );
/*!
* \\brief Sets the Sync Word given by index used in GFSK, FLRC and BLE protocols
*
* \\remark 5th byte isn't used in FLRC and BLE protocols
*
* \\param [in] syncWordIdx Index of SyncWord to be set [1..3]
* \\param [in] syncWord SyncWord bytes ( 5 bytes )
*
* \\retval status [0: OK, 1: NOK]
*/
uint8_t ( *SetSyncWord )( uint8_t syncWordIdx, uint8_t *syncWord );
/*!
* \\brief Sets the radio in reception mode
*
* \\param [in] timeout Structure describing the reception timeout value
*/
void ( *SetRx )( TickTime_t timeout );
/*!
* \\brief Reads the payload received. If the received payload is longer
* than maxSize, then the method returns 1 and do not set size and payload.
*
* \\param [out] payload A pointer to a buffer into which the payload will be copied
* \\param [out] size A pointer to the size of the payload received
* \\param [in] maxSize The maximal size allowed to copy into the buffer
*/
uint8_t ( *GetPayload )( uint8_t *payload, uint8_t *size, uint8_t maxSize );
/*!
* \\brief Sends a payload
*
* \\param [in] payload A pointer to the payload to send
* \\param [in] size The size of the payload to send
* \\param [in] timeout The timeout for Tx operation
*/
void ( *SendPayload )( uint8_t *payload, uint8_t size, TickTime_t timeout );
/*!
* \\brief Set the driver in polling mode.
*
* In polling mode the application is responsible to call ProcessIrqs( ) to
* execute callbacks functions.
* The default mode is Interrupt Mode.
* @code
* // Initializations and callbacks declaration/definition
* radio = SX1281( mosi, miso, sclk, nss, busy, int1, int2, int3, rst, &callbacks );
* radio.Init( );
* radio.SetPollingMode( );
*
* while( true )
*
* // IRQ processing is automatically done
* radio.ProcessIrqs( ); // <-- here, as well as callback functions
* // calls
* // Do some applicative work
*
* @endcode
*
* \\see SX1281SetInterruptMode
*/
void ( *SetPollingMode )( void );
/*!
* \\brief Set the driver in interrupt mode.
*
* In interrupt mode, the driver communicate with the radio during the
* interruption by direct calls to ProcessIrqs( ). The main advantage is
* the possibility to have low power application architecture.
* This is the default mode.
* @code
* // Initializations and callbacks declaration/definition
* radio = SX1281( mosi, miso, sclk, nss, busy, int1, int2, int3, rst, &callbacks );
* radio.Init( );
* radio.SetInterruptMode( ); // Optionnal. Driver default behavior
*
* while( true )
*
* // Do some applicative work
*
* @endcode
*
* \\see SX1281SetPollingMode
*/
void ( *SetInterruptMode )( void );
/*!
* \\brief Initializes the radio registers to the recommended default values
*/
void ( *SetRegistersDefault )( void );
/*!
* \\brief Gets the current Operation Mode of the Radio
*
* \\retval RadioOperatingModes_t last operating mode
*/
RadioOperatingModes_t ( *GetOpMode )( void );
/*!
* \\brief Sets the radio in sleep mode
*
* \\param [in] sleepConfig The sleep configuration describing data
* retention and RTC wake-up
*/
void ( *SetSleep )( SleepParams_t sleepConfig );
/*!
* \\brief Sets the radio in FS mode
*/
void ( *SetFs )( void );
/*!
* \\brief Sets the radio in transmission mode
*
* \\param [in] timeout Structure describing the transmission timeout value
*/
void ( *SetTx )( TickTime_t timeout );
/*!
* \\brief Sets the Rx duty cycle management parameters
*
* \\param [in] rxTime Structure describing reception timeout value
* \\param [in] sleepTime Structure describing sleep timeout value
*/
void ( *SetRxDutyCycle )( RadioTickSizes_t Step, uint16_t NbStepRx, uint16_t RxNbStepSleep );
/*!
* \\brief Sets the radio in CAD mode
*
* \\see SX1281::SetCadParams
*/
void ( *SetCad )( void );
/*!
* \\brief Sets the radio in continuous wave transmission mode
*/
void ( *SetTxContinuousWave )( void );
/*!
* \\brief Sets the radio in continuous preamble transmission mode
*/
void ( *SetTxContinuousPreamble )( void );
/*!
* \\brief Gets the current radio protocol
*
* \\retval packetType [PACKET_TYPE_GFSK, PACKET_TYPE_LORA,
* PACKET_TYPE_FLRC, PACKET_TYPE_BLE, PACKET_TYPE_NONE]
*/
RadioPacketTypes_t ( *GetPacketType )( void );
/*!
* \\brief Sets the number of symbols to be used for Channel Activity
* Detection operation
*
* \\param [in] cadSymbolNum The number of symbol to use for Channel Activity
* Detection operations [LORA_CAD_01_SYMBOL, LORA_CAD_02_SYMBOL,
* LORA_CAD_04_SYMBOL, LORA_CAD_08_SYMBOL, LORA_CAD_16_SYMBOL]
*/
void ( *SetCadParams )( RadioLoRaCadSymbols_t cadSymbolNum );
/*!
* \\brief Gets the last received packet buffer status
*
* \\param [out] payloadLength Last received packet payload length
* \\param [out] rxStartBuffer Last received packet buffer address pointer
*/
void ( *GetRxBufferStatus )( uint8_t *payloadLength, uint8_t *rxStartBuffer );
/*!
* \\brief Gets the last received packet payload length
*
* \\param [out] pktStatus A structure of packet status
*/
void ( *GetPacketStatus )( PacketStatus_t *pktStatus );
/*!
* \\brief Returns the instantaneous RSSI value for the last packet received
*
* \\retval rssiInst Instantaneous RSSI
*/
int8_t ( *GetRssiInst )( void );
/*!
* \\brief Returns the current IRQ status
*
* \\retval irqStatus IRQ status
*/
uint16_t ( *GetIrqStatus )( void );
/*!
* \\brief Clears the IRQs
*
* \\param [in] irq IRQ(s) to be cleared
*/
void ( *ClearIrqStatus )( uint16_t irq );
/*!
* \\brief Calibrates the given radio block
*
* \\param [in] calibParam The description of blocks to be calibrated
*/
void ( *Calibrate )( CalibrationParams_t calibParam );
/*!
* \\brief Saves the current selected modem configuration into data RAM
*/
void ( *SetSaveContext )( void );
/*!
* \\brief Sets the chip to automatically send a packet after the end of a packet reception
*
* \\remark The offset is automatically compensated inside the function
*
* \\param [in] time The delay in us after which a Tx is done
*/
void ( *SetAutoTx )( uint16_t time );
/*!
* \\brief Sets the chip to automatically receive a packet after the end of a packet transmission
*
* \\remark The offset is automatically compensated inside the function
*
* \\param [in] time The delay in us after which a Rx is done
*/
void ( *SetAutoFS )( uint8_t enable );
/*!
* \\brief Enables or disables long preamble detection mode
*
* \\param [in] enable [0: Disable, 1: Enable]
*/
void ( *SetLongPreamble )( uint8_t enable );
/*!
* \\brief Saves the payload to be send in the radio buffer
*
* \\param [in] payload A pointer to the payload
* \\param [in] size The size of the payload
*/
void ( *SetPayload )( uint8_t *payload, uint8_t size );
/*!
* \\brief Sets the Sync Word given by index used in GFSK, FLRC and BLE protocols
*
* \\remark 5th byte isn't used in FLRC and BLE protocols
*
* \\param [in] syncWordIdx Index of SyncWord to be set [1..3]
* \\param [in] syncWord SyncWord bytes ( 5 bytes )
*
* \\retval status [0: OK, 1: NOK]
*/
void ( *SetSyncWordErrorTolerance )( uint8_t errorBits );
/*!
* \\brief Sets the Initial value for the LFSR used for the CRC calculation
*
* \\param [in] seed Initial LFSR value ( 4 bytes )
*
*/
void ( *SetCrcSeed )( uint16_t seed );
/*!
* \\brief Set the Access Address field of BLE packet
*
* \\param [in] accessAddress The access address to be used for next BLE packet sent
*
* \\see SX1281::SetBleAdvertizerAccessAddress
*/
void ( *SetBleAccessAddress )( uint32_t accessAddress );
/*!
* \\brief Set the Access Address for Advertizer BLE packets
*
* All advertizer BLE packets must use a particular value for Access
* Address field. This method sets it.
*
* \\see SX1281::SetBleAccessAddress
*/
void ( *SetBleAdvertizerAccessAddress )( void );
/*!
* \\brief Sets the seed used for the CRC calculation
*
* \\param [in] seed The seed value
*
*/
void ( *SetCrcPolynomial )( uint16_t seed );
/*!
* \\brief Sets the Initial value of the LFSR used for the whitening in GFSK, FLRC and BLE protocols
*
* \\param [in] seed Initial LFSR value
*/
void ( *SetWhiteningSeed )( uint8_t seed );
/*!
* \\brief Return the Estimated Frequency Error in LORA operations
*
* \\retval efe The estimated frequency error [Hz]
*/
double ( *GetFrequencyError )( void );
;
2、sx1281.c文件
sx1281.c为实现文件,实现上述所有接口,官方提供,无需更改。
3、sx1281-hal.c文件
sx1281-hal.c为SX1281驱动和用户之间提供实现层:
1)Radio变量提供radio.h抽象的实例,便于用于通过它调用sx1281.c的函数。
2)需要用户提供:HAL_Delay()、GpioWrite()、GpioRead、SpiInOut()、SpiIn()等函数。
3)HAL_Delay()函数实现:这个函数就是一个延时函数,根据手册自己设定,为了调试,这里实现了一个ms级的软件延时函数。
4)GpioWrite()函数实现:
HAL库:
void GpioWrite( GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, uint32_t value )
HAL_GPIO_WritePin( GPIOx, GPIO_Pin , ( GPIO_PinState ) value );
LL库:
#define GpioWrite(__PORT,__PIN,VALUE) do \\
if(VALUE) \\
LL_GPIO_SetOutputPin(__PORT,__PIN); \\
else \\
LL_GPIO_ResetOutputPin(__PORT,__PIN);\\
\\
while(0);4)GpioRead()函数实现:
HAL库:
uint32_t GpioRead( GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin )
return HAL_GPIO_ReadPin( GPIOx, GPIO_Pin );
LL库:
#define GPIO_READ_BIT(__GPIO,__PIN) LL_GPIO_IsInputPinSet(__GPIO,__PIN)
#define GpioRead(__GPIO,__PIN) GPIO_READ_BIT(__GPIO,__PIN)5)SpiInOut()函数实现:
HAL库:
/*!
* @brief Sends txBuffer and receives rxBuffer
*
* @param [IN] txBuffer Byte to be sent
* @param [OUT] rxBuffer Byte to be sent
* @param [IN] size Byte to be sent
*/
void SpiInOut( uint8_t *txBuffer, uint8_t *rxBuffer, uint16_t size )
HAL_SPIEx_FlushRxFifo( &SpiHandle );
#ifdef USE_DMA
blockingDmaFlag = true;
HAL_SPI_TransmitReceive_DMA( &SpiHandle, txBuffer, rxBuffer, size );
WAIT_FOR_BLOCKING_FLAG
#else
HAL_SPI_TransmitReceive( &SpiHandle, txBuffer, rxBuffer, size, HAL_MAX_DELAY );
#endif
这里有传入了一个发送数组首地址、一个接收数组首地址,还有一个长度;我的疑问是先把数据发送出去,再接收,还是发送一个字节,接收一个字节。往下看底层函数HAL_SPI_TransmitReceive(因为HAL_SPI_TransmitReceive_DMA和HAL_SPI_TransmitReceive实现功能是一样的):
while ((hspi->TxXferCount > 0U) || (hspi->RxXferCount > 0U))
/* check TXE flag */
if (txallowed && (hspi->TxXferCount > 0U) && (__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_TXE)))
if (hspi->TxXferCount > 1U)
hspi->Instance->DR = *((uint16_t *)pTxData);
pTxData += sizeof(uint16_t);
hspi->TxXferCount -= 2U;
else
*(__IO uint8_t *)&hspi->Instance->DR = (*pTxData++);
hspi->TxXferCount--;
/* Next Data is a reception (Rx). Tx not allowed */
txallowed = 0U;
#if (USE_SPI_CRC != 0U)
/* Enable CRC Transmission */
if ((hspi->TxXferCount == 0U) && (hspi->Init.CRCCalculation == SPI_CRCCALCULATION_ENABLE))
/* Set NSS Soft to received correctly the CRC on slave mode with NSS pulse activated */
if (((hspi->Instance->CR1 & SPI_CR1_MSTR) == 0U) && ((hspi->Instance->CR2 & SPI_CR2_NSSP) == SPI_CR2_NSSP))
SET_BIT(hspi->Instance->CR1, SPI_CR1_SSM);
SET_BIT(hspi->Instance->CR1, SPI_CR1_CRCNEXT);
#endif /* USE_SPI_CRC */
/* Wait until RXNE flag is reset */
if ((hspi->RxXferCount > 0U) && (__HAL_SPI_GET_FLAG(hspi, SPI_FLAG_RXNE)))
if (hspi->RxXferCount > 1U)
*((uint16_t *)pRxData) = hspi->Instance->DR;
pRxData += sizeof(uint16_t);
hspi->RxXferCount -= 2U;
if (hspi->RxXferCount <= 1U)
/* set fiforxthresold before to switch on 8 bit data size */
SET_BIT(hspi->Instance->CR2, SPI_RXFIFO_THRESHOLD);
else
(*(uint8_t *)pRxData++) = *(__IO uint8_t *)&hspi->Instance->DR;
hspi->RxXferCount--;
/* Next Data is a Transmission (Tx). Tx is allowed */
txallowed = 1U;
if ((Timeout != HAL_MAX_DELAY) && ((HAL_GetTick() - tickstart) >= Timeout))
errorcode = HAL_TIMEOUT;
goto error;
从代码分析是发送一个字节,接收一个字节,我的实现:
uint8_t Spi1InOut( uint8_t outData )
uint8_t RxData=0;
while(!LL_SPI_IsActiveFlag_TXE(SPI1));
LL_SPI_TransmitData8(SPI1,outData);
//Soft_delay_us(100);
while(!LL_SPI_IsActiveFlag_TXE(SPI1));
while(!LL_SPI_IsActiveFlag_RXNE(SPI1));
RxData = LL_SPI_ReceiveData8(SPI1);
return RxData;
void SpiInOut( uint8_t *txBuffer, uint8_t *rxBuffer, uint16_t size )
uint16_t i=0;
if(NULL == txBuffer || NULL == rxBuffer || !size)
return;
for(i=0;i<size;i++)
rxBuffer[i] = Spi1InOut(txBuffer[i]);
6)SpiIn()函数实现:
HAL库:
void SpiIn( uint8_t *txBuffer, uint16_t size )
#ifdef USE_DMA
blockingDmaFlag = true;
HAL_SPI_Transmit_DMA( &SpiHandle, txBuffer, size );
WAIT_FOR_BLOCKING_FLAG
#else
HAL_SPI_Transmit( &SpiHandle, txBuffer, size, HAL_MAX_DELAY );
#endif
我的实现:
void SpiIn( uint8_t *txBuffer, uint16_t size )
uint16_t i=0;
if(NULL == txBuffer || !size)
return;
for(i=0;i<size;i++)
Spi1InOut(txBuffer[i]);
7)GpioSetIrq()函数屏蔽掉
8)SPI初始化:
HAL库:
void SpiInit( void )
SpiHandle.Instance = SPI1;
SpiHandle.Init.Mode = SPI_MODE_MASTER;
SpiHandle.Init.Direction = SPI_DIRECTION_2LINES;
SpiHandle.Init.DataSize = SPI_DATASIZE_8BIT;
SpiHandle.Init.CLKPolarity = SPI_POLARITY_LOW;
SpiHandle.Init.CLKPhase = SPI_PHASE_1EDGE;
SpiHandle.Init.NSS = SPI_NSS_SOFT;
SpiHandle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_16;
SpiHandle.Init.FirstBit = SPI_FIRSTBIT_MSB;
SpiHandle.Init.TIMode = SPI_TIMODE_DISABLE;
SpiHandle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
SpiHandle.Init.CRCPolynomial = 7;
SpiHandle.Init.CRCLength = SPI_CRC_LENGTH_DATASIZE;
SpiHandle.Init.NSSPMode = SPI_NSS_PULSE_DISABLE;
if ( HAL_SPI_Init( &SpiHandle ) != HAL_OK )
Error_Handler( );
我的实现:
/**
* @brief SPI1 Initialization Function
* @param None
* @retval None
*/
static void spi1_init(void)
/* USER CODE BEGIN SPI1_Init 0 */
/* USER CODE END SPI1_Init 0 */
//LL_SPI_InitTypeDef SPI_InitStruct = 0;
//LL_GPIO_InitTypeDef GPIO_InitStruct;
/* Peripheral clock enable */
LL_IOP_GRP1_EnableClock(LL_IOP_GRP1_PERIPH_GPIOA);
LL_APB2_GRP1_EnableClock(LL_APB2_GRP1_PERIPH_SPI1);
//
LL_SPI_Disable(SPI1);
/**SPI1 GPIO Configuration
PA5 ------> SPI1_SCK
PA6 ------> SPI1_MISO
PA7 ------> SPI1_MOSI
*/
do
const static LL_GPIO_InitTypeDef c_tGPIO_InitStruct =
.Pin = LL_GPIO_PIN_5,
.Mode = LL_GPIO_MODE_ALTERNATE,
.Speed = LL_GPIO_SPEED_FREQ_VERY_HIGH,
.OutputType = LL_GPIO_OUTPUT_PUSHPULL,
.Pull = LL_GPIO_PULL_UP,
.Alternate = LL_GPIO_AF_0,
;
LL_GPIO_Init(GPIOA, (LL_GPIO_InitTypeDef*)&c_tGPIO_InitStruct);
while(0);
do
const static LL_GPIO_InitTypeDef c_tGPIO_InitStruct =
.Pin = LL_GPIO_PIN_6,
.Mode = LL_GPIO_MODE_ALTERNATE,
.Speed = LL_GPIO_SPEED_FREQ_HIGH,
.OutputType = LL_GPIO_OUTPUT_PUSHPULL,
.Pull = LL_GPIO_PULL_UP,
.Alternate = LL_GPIO_AF_0,
;
LL_GPIO_Init(GPIOA, (LL_GPIO_InitTypeDef*)&c_tGPIO_InitStruct);
while(0);
do
const static LL_GPIO_InitTypeDef c_tGPIO_InitStruct =
.Pin = LL_GPIO_PIN_7,
.Mode = LL_GPIO_MODE_ALTERNATE,
.Speed = LL_GPIO_SPEED_FREQ_HIGH,
.OutputType = LL_GPIO_OUTPUT_PUSHPULL,
.Pull = LL_GPIO_PULL_UP,
.Alternate = LL_GPIO_AF_0,
;
LL_GPIO_Init(GPIOA, (LL_GPIO_InitTypeDef*)&c_tGPIO_InitStruct);
while(0);
/* SPI1 interrupt Init */
NVIC_SetPriority(SPI1_IRQn, 0);
NVIC_DisableIRQ(SPI1_IRQn);
//NVIC_EnableIRQ(SPI1_IRQn);
/* SPI1 parameter configuration*/
/* USER CODE BEGIN SPI1_Init 1 */
/* USER CODE END SPI1_Init 1 */
do
const static LL_SPI_InitTypeDef c_tSPI_InitStruct =
.TransferDirection = LL_SPI_FULL_DUPLEX,
.Mode = LL_SPI_MODE_MASTER, //
.DataWidth = LL_SPI_DATAWIDTH_8BIT, //
.ClockPolarity = LL_SPI_POLARITY_LOW, //
.ClockPhase = LL_SPI_PHASE_1EDGE, //
.NSS = LL_SPI_NSS_SOFT, //
.BaudRate = LL_SPI_BAUDRATEPRESCALER_DIV16, //
.BitOrder = LL_SPI_MSB_FIRST, //
.CRCCalculation = LL_SPI_CRCCALCULATION_DISABLE,
.CRCPoly = 7,
;
LL_SPI_Init(SPI1, (LL_SPI_InitTypeDef*)&c_tSPI_InitStruct);
//LL_SPI_SetDataWidth(SPI1,LL_SPI_DATAWIDTH_8BIT);
while(0);
LL_SPI_SetStandard(SPI1, LL_SPI_PROTOCOL_MOTOROLA);
LL_SPI_DisableNSSPulseMgt(SPI1);
/* USER CODE BEGIN SPI1_Init 2 */
/* USER CODE END SPI1_Init 2 */
/* Configure the SPI1 FIFO Threshold */
LL_SPI_SetRxFIFOThreshold(SPI1, LL_SPI_RX_FIFO_TH_QUARTER);
/* Configure SPI1 transfer interrupts */
/* Enable TXE Interrupt */
//LL_SPI_EnableIT_TXE(SPI1);
/* Enable RXNE Interrupt */
//LL_SPI_EnableIT_RXNE(SPI1);
/* Enable SPI1 Error Interrupt */
//LL_SPI_EnableIT_ERR(SPI1);
LL_SPI_Enable(SPI1);
如果能够打印出来如下信息,则表示SPI驱动移植成功。
4、main.c文件
1)官网驱动main.c中其它和Lora相关的拷贝过来:
2)switch( AppState )屏蔽掉
3)增加delay()
while(1)
SX1281ProcessIrqs( );
my_delay_ms(1000);
4)修改5个函数
void OnTxDone( void )
AppState = APP_TX;
printf( "<>>>>>>>>OnTxDone\\n\\r" );
Radio.SetDioIrqParams( TxIrqMask, TxIrqMask, IRQ_RADIO_NONE, IRQ_RADIO_NONE );
Radio.SendPayload((uint8_t*)"12345",5, ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, TX_TIMEOUT_VALUE );
void OnRxDone( void )
AppState = APP_RX;
//printf( "<>>>>>>>>OnRxDone\\n\\r" );
BufferSize = 0;
Radio.GetPayload( Buffer, &BufferSize, BUFFER_SIZE );
Buffer[BufferSize+1] = 0;
//printf("size = %d ,%s",BufferSize,Buffer);
MY_PRINTF("OnRxDone\\r\\n",Buffer,BufferSize);
//Radio.SetRx( ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, RX_TIMEOUT_VALUE );
void OnTxTimeout( void )
AppState = APP_TX_TIMEOUT;
printf( "<>>>>>>>>TXE\\n\\r" );
Radio.SetDioIrqParams( TxIrqMask, TxIrqMask, IRQ_RADIO_NONE, IRQ_RADIO_NONE );
Radio.SendPayload((uint8_t*)"12345",5, ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, TX_TIMEOUT_VALUE );
void OnRxTimeout( void )
AppState = APP_RX_TIMEOUT;
printf( "<>>>>>>>>OnRxTimeout\\n\\r" );
//Radio.SetRx( ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, RX_TIMEOUT_VALUE );
Radio.SetRx( ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, 0xFFFF );
void OnRxError( IrqErrorCode_t errorCode )
AppState = APP_RX_ERROR;
printf( "RXE<>>>>>>>>\\n\\r" );
Radio.SetRx( ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, RX_TIMEOUT_VALUE );
void OnCadDone( bool channelActivityDetected )
printf( "<>>>>>>>>OnCadDone\\n\\r" );
5)SpreadingFactor配置:

增加:
Radio.SetStandby( STDBY_RC );
switch(modulationParams.Params.LoRa.SpreadingFactor)
case LORA_SF5:
case LORA_SF6:
Radio.WriteRegister(0x0925,0x1E);
break;
case LORA_SF7:
case LORA_SF8:
Radio.WriteRegister(0x0925,0x37);
break;
case LORA_SF9:
case LORA_SF10:
case LORA_SF11:
case LORA_SF12:
Radio.WriteRegister(0x0925,0x32);
break;
6)接收相关:

通过如下配置为接收:
Radio.SetDioIrqParams( RxIrqMask, RxIrqMask, IRQ_RADIO_NONE, IRQ_RADIO_NONE );
//Radio.SetRx( ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, RX_TIMEOUT_VALUE );
Radio.SetRx( ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, 0xFFFF );7)通过如下配置为发送:
Radio.SetDioIrqParams( TxIrqMask, TxIrqMask, IRQ_RADIO_NONE, IRQ_RADIO_NONE );
Radio.SendPayload((uint8_t*)"12345",5, ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, TX_TIMEOUT_VALUE );8)屏蔽掉SX1281SetPollingMode( );增加SX1281SetInterruptMode();因为SX1281ProcessIrqs( )函数中,如下逻辑不对:
if( PollingMode == true )
if( IrqState == true )
__disable_irq( );
IrqState = false;
__enable_irq( );
else
return;
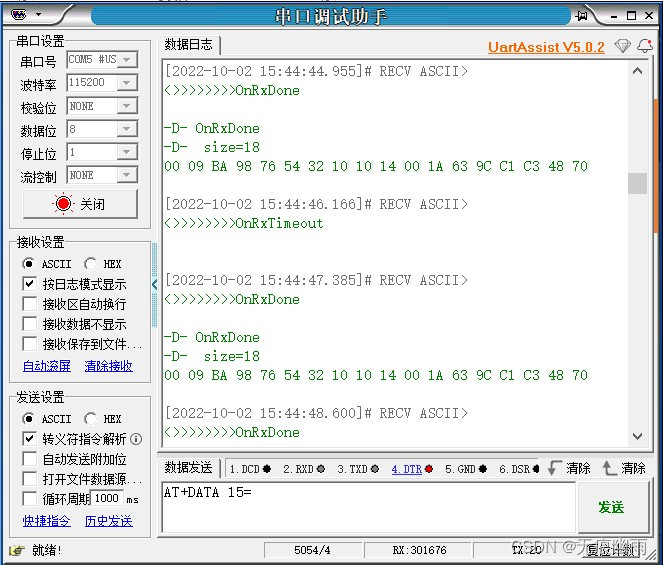
下面是接收其他数据效果图:
<----------------------------------------------------------------------------------------------------------------------------->
三、问题汇总
2022.10.03
1、接收数据长度问题
显现:就是发送5个字节,但是接收是128字节
参数配置:
/*!
* \\brief Defines the buffer size, i.e. the payload size
*/
#define BUFFER_SIZE 128
packetParams.PacketType = PACKET_TYPE_LORA;
packetParams.Params.LoRa.PreambleLength = 6;
packetParams.Params.LoRa.HeaderType = LORA_PACKET_VARIABLE_LENGTH;
packetParams.Params.LoRa.PayloadLength = BUFFER_SIZE;
packetParams.Params.LoRa.CrcMode = LORA_CRC_ON;
packetParams.Params.LoRa.InvertIQ = LORA_IQ_NORMAL;发送配置:
Buffer[0] = 1;
Buffer[1] = 2;
Buffer[2] = 3;
Buffer[3] = 4;
Buffer[4] = 5;
Radio.SendPayload(Buffer,5, ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, TX_TIMEOUT_VALUE );接收显示:
Radio.GetPayload( Buffer, &BufferSize, BUFFER_SIZE );
MY_PRINTF("OnRxDone\\r\\n",Buffer,BufferSize);结果:
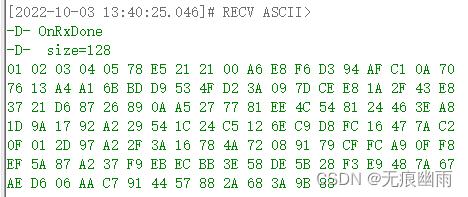
查遍了手册和官方提供的SX1281PingPong历程,没有解决;问官方支持,也没有解决。于是查看官方sx1280-devKit-v1p6历程,看到:
case PER_TX_START:
Eeprom.EepromData.DemoSettings.CntPacketTx++;
DemoInternalState = APP_IDLE;
Buffer[0] = ( Eeprom.EepromData.DemoSettings.CntPacketTx >> 24 ) & 0xFF;
Buffer[1] = ( Eeprom.EepromData.DemoSettings.CntPacketTx >> 16 ) & 0xFF;
Buffer[2] = ( Eeprom.EepromData.DemoSettings.CntPacketTx >> 8 ) & 0xFF;
Buffer[3] = Eeprom.EepromData.DemoSettings.CntPacketTx & 0xFF;
Buffer[4] = PerMsg[0];
Buffer[5] = PerMsg[1];
Buffer[6] = PerMsg[2];
for( i = 7; i < Eeprom.EepromData.DemoSettings.PayloadLength; i++ )
Buffer[i] = i;
TX_LED = !TX_LED;
IrqMask = IRQ_TX_DONE | IRQ_RX_TX_TIMEOUT;
UpdateRadioFrequency( Channels[CurrentChannel] );
Radio.SetRfFrequency( Channels[CurrentChannel] );
Radio.SetDioIrqParams( IrqMask, IrqMask, IRQ_RADIO_NONE, IRQ_RADIO_NONE );
Radio.SendPayload( Buffer, Eeprom.EepromData.DemoSettings.PayloadLength,
( TickTime_t ) RX_TIMEOUT_TICK_SIZE, Eeprom.EepromData.DemoSettings.TimeOnAir << 1 );继续追代码:
ModulationParams.Params.LoRa.SpreadingFactor = ( RadioLoRaSpreadingFactors_t ) Eeprom.EepromData.DemoSettings.ModulationParam1;
ModulationParams.Params.LoRa.Bandwidth = ( RadioLoRaBandwidths_t ) Eeprom.EepromData.DemoSettings.ModulationParam2;
ModulationParams.Params.LoRa.CodingRate = ( RadioLoRaCodingRates_t ) Eeprom.EepromData.DemoSettings.ModulationParam3;
PacketParams.Params.LoRa.PreambleLength = Eeprom.EepromData.DemoSettings.PacketParam1;
PacketParams.Params.LoRa.HeaderType = ( RadioLoRaPacketLengthsModes_t )Eeprom.EepromData.DemoSettings.PacketParam2;
PacketParams.Params.LoRa.PayloadLength = Eeprom.EepromData.DemoSettings.PacketParam3;
PacketParams.Params.LoRa.Crc = ( RadioLoRaCrcModes_t ) Eeprom.EepromData.DemoSettings.PacketParam4;
PacketParams.Params.LoRa.InvertIQ = ( RadioLoRaIQModes_t ) Eeprom.EepromData.DemoSettings.PacketParam5;
Eeprom.EepromData.DemoSettings.PayloadLength = PacketParams.Params.LoRa.PayloadLength;于是明白了,发送的字长是由PacketParams.Params.LoRa.PayloadLength参数决定的,并不是由Radio.SendPayload()函数传入的参数决定。于是进行如下修改:
void rf_send(uint8_t* pchBuffer,uint16_t hwSize)
if(NULL == pchBuffer || !hwSize)
return;
if(hwSize != packetParams.Params.LoRa.PayloadLength)
packetParams.Params.LoRa.PayloadLength = hwSize;
Radio.SetPacketParams( &packetParams );
Radio.SendPayload(pchBuffer,hwSize, ( TickTime_t ) RX_TIMEOUT_TICK_SIZE, TX_TIMEOUT_VALUE );
结果:

注意:经过测试,在显示包头格式下,PacketParams.Params.LoRa.PayloadLength参数不影响接收数据长度,也就是说这个参数设置多少无所谓,接收数据根据实际发送字长接收;隐士包头格式未测试。
以上是关于SX1281驱动学习笔记一:Lora驱动移植的主要内容,如果未能解决你的问题,请参考以下文章