模型并行 | 大规模语言模型架构 Megatron
Posted 幻方AI小编
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了模型并行 | 大规模语言模型架构 Megatron相关的知识,希望对你有一定的参考价值。
随着AI模型的规模越来越大,分布式训练技术越来越被广泛使用。现行的分布式训练方法主要包含两个部分:数据并行(Data Parallel)和模型并行(Model Parallel)。数据并行是将模型完整拷贝到多张显卡中,对批次数据进行并行计算,适合规模小而数据多的训练场景;而模型并行适合超大规模参数的模型训练,将模型不同的部分分别加载到不同的显卡中,依次计算得出结果。
Megratron是NVIDIA提出的一种分布式训练大规模语言模型的架构,针对Transformer进行了专门的优化,主要采用的是模型并行的方案。这篇文章将描述幻方AI对于NVIDIA Megatron在萤火二号平台上运行的一些实验,以及与我们目前的方法的对比。
模型:GPT
代码:GitHub - NVIDIA/Megatron-LM: Ongoing research training transformer models at scale
环境:幻方萤火二号,16个节点共128张A100(A100-40GB x128)
Megatron简介
Megatron是NVIDIA提出的一种由于分布式训练大规模语言模型的架构,针对Transformer进行了专门的优化(也就是大矩阵乘法)。
第一篇论文发表于2019年9月:Megatron-LM: Training Multi-Billion Parameter Language Models Using Model Parallelism,主要提出了通过将矩阵分块提高并行度的方法。
第二篇论文发表于2021年4月:Efficient Large-Scale Language Model Training on GPU Clusters Using Megatron-LM,对于分布式中的一些重要的设计,如tensor parallel、pipeline parallel、micro batch size等进行了一些分析与讨论。同时提出了更加精细的pipeline结构与communication模式。
Megatron作者提供的性能结果如下:
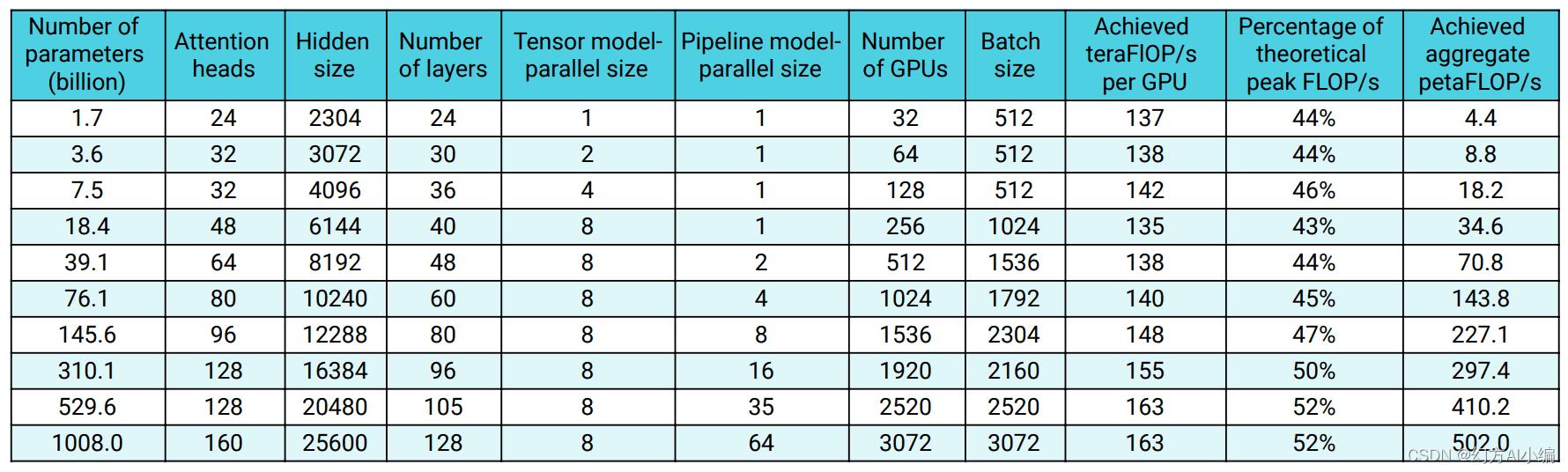
这些测试是基于DGX A100-80GB集群完成的。和萤火二号的测试环境相比,硬件环境上主要存在着如下区别:
- DGX配备了NVLINK、NVSWITCH与IB,使得AllReduce的效率非常高。萤火二号的通讯效率相对更低,尤其是在不使用hfreduce的前提下。
- Megatron使用了A100-80GB而萤火二号使用了A100-40GB。除了显存大小不同之外,二者的内存带宽也不同(2.0T/s vs 1.6T/s)。
除此之外,除去实现细节上的差异,Megatron和我们的方法的主要不同在于
- Megaton支持tensor parallel,并相应地优化了数据传输。
- Megatron对于pipeline机制进行了一些优化(原论文Fig.4)。
- Megatron自行实现了一套DDP框架,而非使用pytorch提供的DDP。
- Megatron自行实现了一些fused kernels,但是为了公平对比被我们disable掉了。
我们关心的问题是,在萤火平台上,Megatron的架构能够达到怎样的训练效率。
我们用于测试的模型配置为:
- hidden size = 3072
- layers = 32
- attention heads = 32
- batch size = 512
- context size = 1024
- vocabulary size = 50264
- micro batch size = 4
总参数量为 3.8 B,单次迭代计算量为 16.53 PFLOP。
Tensor Parallel vs. Pipeline Parallel
在Megatron的论文中,作者的建议是在节点内尽量使用tensor-parallel。pipeline-parallel主要在节点间使用,目的在于增大可用显存,而且应当尽量少。这一观点的原因在于pipeline会不可避免地引入bubble而降低效率。然而,另一方面,tensor-parallel需要更多的AllReduce操作,不适合在带宽较低的设备之间进行。
在这一节中我们测试不同的tensor parallel与pipeline parallel的训练效率。我们的实验观察到了与论文结论相反的现象:
| TP = 1, PP = 4 | TP = 2, PP = 2 | TP = 4, PP = 1 | |
|---|---|---|---|
| time (s) | 4.43 | 5.41 | 9.54 |
| percentage of peak | 9.4% | 7.6% | 4.3% |
其中,TP = tensor parallel,PP = pipeline parallel。为了避免跨numa,每个进程使用4块GPU。更细致的log显示,无论是forward还是backward,在使用tensor parallel后的时间开销都显著增加。此外,GPU利用率远远低于论文中的结果(48%)。
为了排除数据传输的影响,我们在单卡上跑了一个小模型作为测试,单次迭代需要的计算量约为119.4 TFLOP,时间约为1950ms,那么也只有理论峰值的 19.6%。
Model Shape
第二个有趣的发现是,在总运算量一定的情况下,不同的(layers,hidden size)组合的计算效率会有较大的差别。
| layer, hidden | 20, 3872 | 32, 3072 | 52, 2400 | 80, 1920 | 80, 2048 |
|---|---|---|---|---|---|
| PFLOP | 16.4 | 16.5 | 16.5 | 16.5 | 18.6 |
| Params (B) | 3.99 | 3.94 | 3.84 | 3.74 | 4.24 |
| Megatron (s/iter) | 5.79 | 4.34 | 7.48 | 8.07 | 5.90 |
| Ours (s/iter) | 8.47 | 6.31 | 8.00 | 8.11 | 7.76 |
| Megatron / Ours | 68.4% | 68.8% | 93.5% | 99.5% | 76.0% |
在一些特殊的形状下,(也就是GPU恰好效率不高的形状下),我们的方法和Megatron还是很接近的…在最优的形状下,差距还是很明显。猜测Megatron的论文里选用这个形状也是因为它的执行效率最高。背后的原因可能是某种尺寸的矩阵的GEMM效率最高。由此进一步推测,tensor parallel也能由于类似的原因实现优化。
Mixed Precision
Megatron默认是使用mixed precision(fp16)进行计算的。而且在前面的图里也能看到A100对于FP16的算力是TF32的两倍。我们做了一个简单的实验对比fp16与tf32在Megatron上的性能差异:
| FP16 | TF32 | |
|---|---|---|
| s/iter | 4.43 | 7.53 |
TF32的时间开销增加了约70%,这个结果是符合预期的。
但是:
- 我们在过去的测试中,发现开关AMP并没有产生太大的性能差距
- Megatron在TF32下的迭代时间与我们的方法有些接近
因此,一个怀疑是,尽管我们在代码中加入了torch.cuda.amp,它并没有真正生效,又或者是使用的方法并不是最恰当的。这可能是我们的方法和Megatron的性能差距的一个来源。当然,也有可能是Megatron完全使用了fp16(而不是mixed precision),这个问题还有待检查。
更新2022 Feb 17:经过检查代码,Megatron 的 —fp16 应该是启用了 mixed precision 的。在 optimizer.py 中可以看到对 fp32 参数的维护。
Pipeline Parallel vs DDP
然而,另一个问题在于,当总GPU数量固定为n时,p 越小,data parallel的进程数 d=n/p 就越多。如果节点间的数据交换需要通过一个中心交换机的话,数据传输的效率可能成为一个问题。
在Megatron中,tensor parallel与pipeline parallel都是将大模型装进显存的方法。但前面的实验已经验证了,在萤火二号的平台上,需要大量带宽的tensor parallel并不合适。那么,理论上,只需要选取最小的 ppp 使得模型能够装入显存就可以了。
接下来是一个关于pipeline的简单实验。为了能够将模型装入单个GPU,我们将hidden size缩小到2048。
| pipeline parallel | 1 | 2 | 4 | 8 | 16 |
|---|---|---|---|---|---|
| Megatron (s/iter) | 2.84 | 3.25 | 3.19 | 3.01 | 3.40 |
| Ours (s/iter) | OOM | 2.80 | 4.40 | 7.69 | not supported |
| Megatron / Ours | 116% | 72.5% | 39.1% |
对于Megatron来说,单卡是最快的,这个符合预期。然而,2卡反而是最慢的,8卡也并没有因为跨numa而显著变慢,16卡也没有因为跨node而显著变慢。作为对比,我们的方法随着pipeline parallel规模的增加,性能下降非常明显。猜测是因为Megatron的pipeline实现更加高效。
补充 2022 Feb 17:在上表中,Megatron 的 pipeline parallel 没有因为跨numa/node而显著性能下降是因为其显卡分配方式本来就是优先跨node的。即使当pipeline深度仅仅为2时,两块显卡也分布在不同的节点上。详见这份文档。
此外,我们的方法在单卡下会OOM而Megatron不会,可能是同样是因为我们没有正确地启用fp16,又或者是我们的实现有一些粗糙(考虑到我们只是调用torch,Megatron也是,按理说不该有很大差别)。
PyTorch自带的pipeline基于RPC实现,无法支持跨节点的pipeline。Megatron中的pipeline应该是作者自行实现的,还有待确认。
另外,上述关于pipeline的分析均基于一个假设:在pipeline的每一步,GPU都能够跑满。然而,实际情况可能并非如此。
先放张示意图:
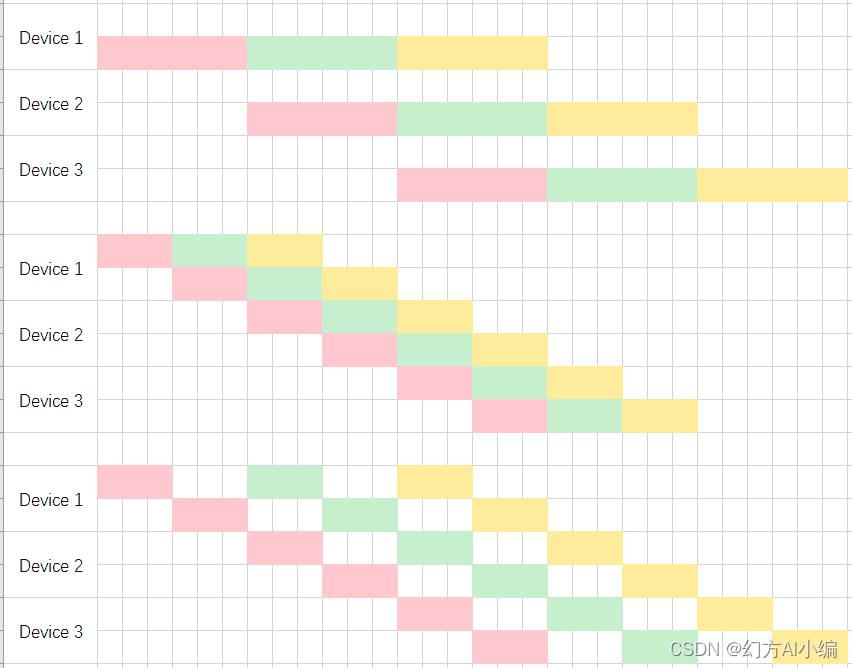
为了简单,只画了forward部分,backward本质上是一样的。现在假设每个GPU的算力没有跑满,所以它有两行。最上面的图表示一个常规的做法,分成3个micro batch。中间的图表示,如果GPU没有跑满的话,可以拆成6步流水线,每个GPU处理两步,那么效率会明显高于3步流水线。而最下面的图表示了另一种可能:尽管我们拆成了6步流水线,但是每一步都会把GPU跑满,体现为每个时间点GPU都只在处理一步运算。然而,在这种情况下,也并不会比拆成3步流水线的情况差。
由于Megatron的实现已经固定了每个GPU只能承载流水线中的一步,我们用我们自己的实现做个实验。
| pipeline stages | 4 | 8 | 16 | 32 |
|---|---|---|---|---|
| forward | 0.63 | 0.64 | 0.66 | 0.70 |
| backward | 4.53 | 4.19 | 3.83 | 3.59 |
| total | 5.50 | 5.11 | 4.74 | 4.53 |
可以看到,随着流水线变深,时间开销缩减到了原来的 83%。尽管foward小幅变慢,但是backward时间显著缩短。
需要指出的是,类似的提升 并不 总是能够在任何模型结构上都会发生。推测这是由于一些特殊的矩阵形状在GPU上的执行效率不高导致GPU没有跑满。上述结果来自于 layers = 54,hidden size = 1920,attention head = 20。这个实验仅仅提示在某些情况下,这样做可能带来加速。
在这些分析中,我们并没有考虑到pipeline带来的sync等overhead。但是从实验结果来看,这些开销是可以接受的。
实际上,我们真正应该减少的是pipeline所占用的GPU数量,而非总的流水线步骤。当我们观察到GPU并没有跑满的时候,在单个GPU内增加pipeline数量是有可能提高效率的:存在着某一个配置,能够平衡过多的pipeline数量带来的overhead与GPU利用率之间的关系。但是理论计算很难给出这个结果,因为overhead受到大量因素的影响。我们更可能需要经验性的实验去寻找这个平衡。显而易见的是,在节点,或者numa内部去分割pipeline的开销是注定远小于跨节点的pipeline的。
一般而言,总的GPU数量是一定的。在这种情况下,pipeline占用更多的GPU,就意味着其它“完美并行”(无bubble)的方式会占用更少的GPU,比如DDP与tensor parallel。二者中,DDP的传输可以和backward并行,但tensor parallel不行,所以会更加显著地受到带宽的限制。一个经验性的建议是,应该尽量减少单个进程占据的GPU的数量,但是可以考虑适当增加每个GPU内的pipeline数量。最后,我们再来解释一下Megatron的pipeline。
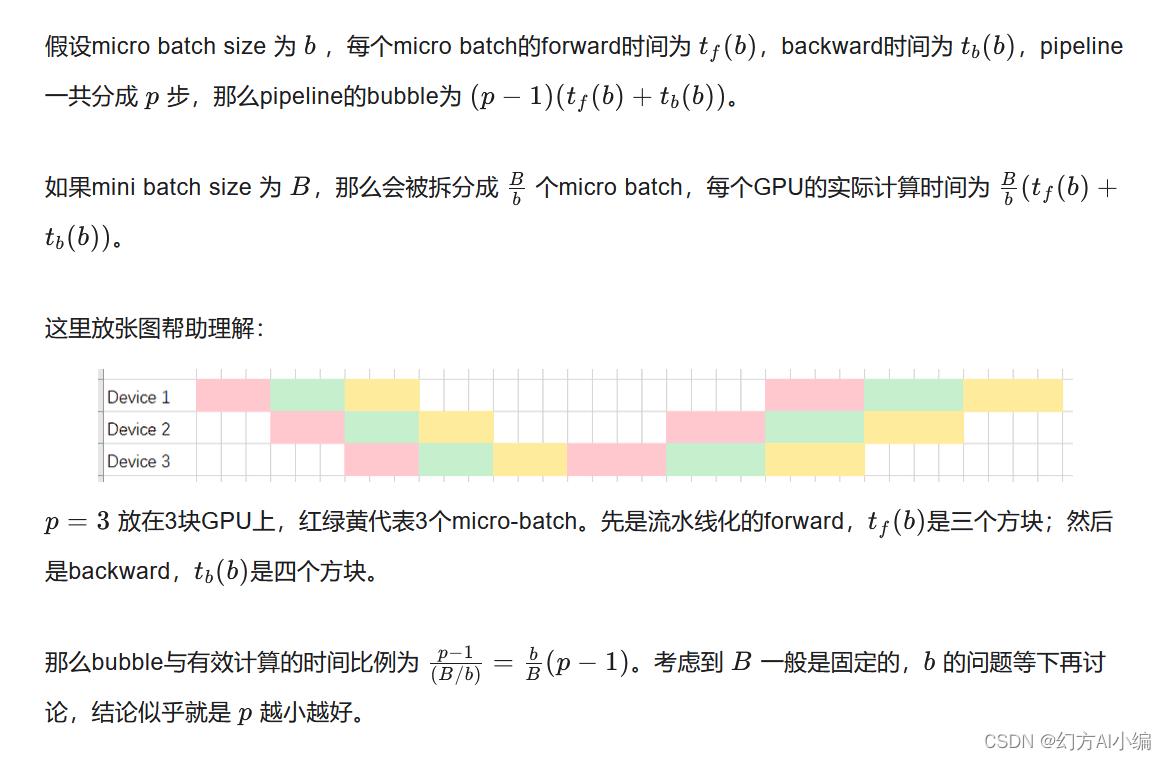
本质上,pipeline的bubble来自于启动时GPU i 要等待GPU i-1 的计算结果。每个GPU执行的时间越久,等待的时间就越久,bubble也会更大。核心的思路在于,如何减少GPU处理每个stage的时间。一方面,我们可以通过减少micro batch size的大小,这个接下来会有讨论。另一方面,我们可以把stage拆得更细致,让每个stage的执行时间更短。这实际上就是Megatron中提出的pipeline的做法。
这里放一张图帮助理解:

假设三个颜色分别代表3个micro batch,总的forward时间为18个格子,backward时间为24个格子。
在默认做法中,我们将计算平均分配到三个GPU上,每个GPU分到6个格子,执行完再传给流水线上的下一个GPU。对应上半个示意图。
另一种方式是,我们将计算拆成6份,每个GPU负责 不连续 的两份,以”interleaved”的方式进行分配。这样,GPU i只需要三个单位的时间就能够执行完毕传递给 GPU i + 1。本质上就是让启动时间尽量短。
这样做带来的额外开销是,数据的传输量增加了。假设每个GPU负责 v 个stage,那么传输量就变为了原来的 v 倍。
Megatron论文里的图片把forward和backward拆散了,看起来不那么直观。注意backward和forward是否并行都不会影响pipeline的执行效率,因为GPU已经跑满了(没跑满的话可以参照前面的讨论)。
Megatron拆开forward和backward的目的在于节约显存占用。如果等待forward全部完成后再进行backward,那么全部的micro batch都要被存下来留着backward时用。但是如果拆散forward与backward,可以理解为对于每一个单独的micro batch都尽可能早地完成forward+backward(而不是等待所有forward都完成后再一起backward),完成backward后就不需要再保留micro batch的数据了,所以节约了显存。
如果等待全部forward完成再进行backward的话,需要保存的数据量正比于micro batch的数量 m;如果拆散了的话,需要保存的数据量正比于pipeline的深度 p。考虑到 m≫p,拆散了更好。
Micro Batch Size
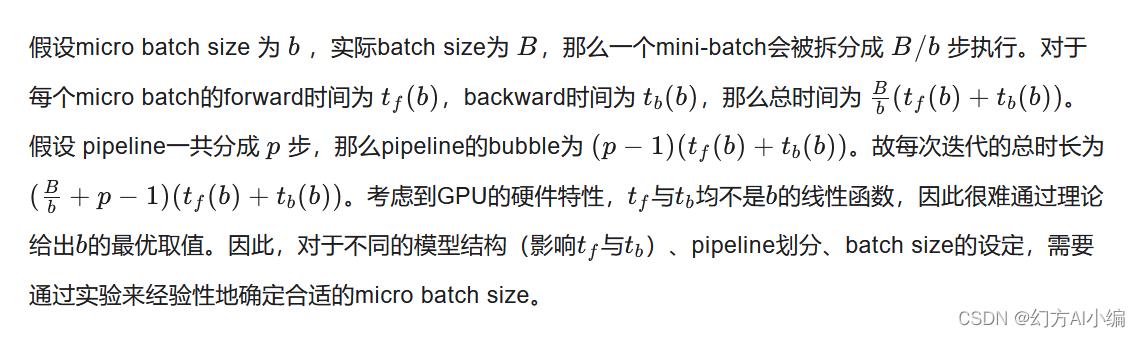
在Megatron上,一个经验性的实验是:
| micro batch size | 2 | 4 | 8 |
|---|---|---|---|
| time (s) | 4.79 | 4.43 | 5.69 |
Checkpoint Layers
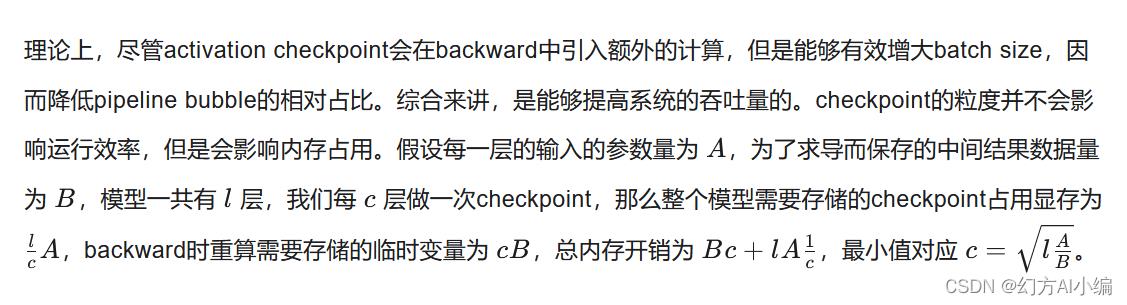
由于 c的取值理论上并不会影响训练效率,最终不超过显存容量即可。根据Megatron论文中的建议,c取1或2是比较合适的值。
在Megatron上的实验验证了checkpoint的粒度并不会对效率产生显著的影响,浮动约为8%:
| checkpoint layers | 1 | 2 | 4 | 8 |
|---|---|---|---|---|
| total | 4.39 | 4.43 | 4.74 | 4.55 |
在我们的方法上得到的结果类似,浮动仅为4%:
| checkpoint layers | 1 | 2 | 4 | 8 | 16 | 32 |
|---|---|---|---|---|---|---|
| forward | 0.60 | 0.59 | 0.60 | 0.60 | 0.60 | 0.59 |
| backward | 5.64 | 5.62 | 5.38 | 5.38 | 5.40 | 5.42 |
| total | 6.41 | 6.37 | 6.15 | 6.14 | 6.16 | 6.18 |
Fused Kernels
Megatron的作者提供了一些fused kernels来提高计算效率。通过将bias-gelu和masked-softmax两个fusion,模型能获得约8.5%的提升,单次迭代时间从4.43s提高到4.08s。
总结
-
pipeline优化。pytorch自带的pipeline还是有比较大的改进空间的,尤其是在发生跨numa的时候,与Megatron的实现产生了非常大的差距(而且pytoch的pipe不支持跨节点)。好的pipeline实现是训练大模型必不可少的一部分,可以考虑像hfreduce一样实现一个hfpipe。
-
关注硬件特性。不同的 (layers, hidden size) 的组合,即使具有相同的理论计算量,实际执行起来的效率差异可以高达85+%。背后的原因应该是矩阵形状的不同。尽管在设计一个模型的时候,训练效率并不是第一考量,但是我们可以通过轻微的调整来追求更高的训练效率。与此同时,另一个可行的做法是通过tensor parallel将矩阵变为最合适的形状。
-
当硬件架构、带宽已经确定后,tensor parallel能否被高效执行是存疑的。但是依旧可能存在某种专门的实现,使tensor parallel的传输开销能够小于pipeline parallel的bubble开销,来达到Megatron中所宣称的执行效率。
OneFlow的大模型分片保存和加载策略

撰文 | 李响
1、大规模模型分片存储简介
在模型比较小时(如 100G 以下),还有可能采用单机存储。当模型参数量比较大时,要求的样本数也更大,训练后做 dump 出来的模型也会很大,单机肯定放不下。
比如,由 DeepSpeed 和 Megatron 驱动的 Megatron 图灵自然语言生成模型(MT-NLG)具有 5300 亿个参数,是迄今为止训练过的最大和最强大的单片 Transformer 语言模型,支持这样的大规模语言模型需要分片保存和加载,不会使用单机内存。此外,在其他 CV、搜索、推荐和广告类等场景下,读取样本量增多和模型复杂度增加都会带来模型存储上的难题。
本文将介绍 OneFlow 的大模型分片保存、加载策略以及使用方法。
2
OneFlow 模型分片保存和加载
OneFlow 的大模型分片保存和加载的实现基于全局视角(Global View,https://docs.oneflow.org/master/cookies/global_tensor.html)的概念,既利用 Placement 与 SBP 完成模型文件(下文都用 state dict 表示)在各个物理设备上的切分,适用于当模型大到无法在单个设备的内存或显存上容纳下的场景。
flow.utils.global_view.to_global() 接口介绍
为了更好理解下文保存模型和加载模型两个部分的内容,首先对 flow.utils.global_view.to_global() 接口和其实现思路进行分析。
区别于现有的 Tensor.to_global() 模式(可以处理普通的 Tensor,https://oneflow.readthedocs.io/en/master/generated/oneflow.Tensor.to_global.html?highlight=to_global%28%29),提供了多种类型的输入支持,包括 None、Tensor、List、Tuple、nn.Module 的 state dict 、nn.Graph 的 state dict 和几种类型的任意组合,既将 List/Tuple/Dict 中的输入 Tensor 转换为 Global Tensor。值得注意的是,其传入参数中的 SBP 支持用户自定义一个 (x, tensor) -> sbp 的函数来解决不同 Tensor 对应不同 SBP 的需求。
并且,与 to_global() 对应的还有 flow.utils.global_view.to_local() 接口。可以参考 API 文档中关于 to_global() 和 to_local() 更详细的介绍(https://oneflow.readthedocs.io/en/master/utils.global_view.html)。在 flow.utils.global_view.to_global() 的实现(https://github.com/Oneflow-Inc/oneflow/blob/master/python/oneflow/utils/global_view/to_global.py)中,支持了多种输入类型适用于现有的 Tensor.to_global() 接口。实现的整体思路大致为检查输入、广播(空)结构,遍历节点、调用回调函数和返回 to_global() 后的结果。
再回到我们关注的地方,这个接口如何做到模型分片保存和加载?
比如对于模型并行/流水并行,模型的参数分散在多个 Rank 上,在保存模型前通过 flow.utils.global_view.to_global() 将 state dict 里的每个 Tensor 在指定 Placement 上转为 Global Tensor,SBP 的类型为 flow.sbp.split,可以设置在特定维度上的切分。同样的,模型也可以按 Split 被加载。当然,SBP 也可以为 Broadcast,支持不同的 SBP 和 Placement 组合。这样,超大规模模型分片存储的问题就被非常好地解决了。
保存模型
大致了解 flow.utils.global_view.to_global() 接口后,在这一部分演示了如何分片保存模型,代码如下:
# 自定义 get_sbp 函数。
def get_sbp(state_dict, tensor):
if tensor is state_dict["System-Train-TrainStep"]:
return flow.sbp.broadcast
if tensor is state_dict["module_pipeline"]["m_stage3.linear.weight"]:
return flow.sbp.split(1)
if tensor is state_dict["module_pipeline"]["m_stage3.linear.bias"]:
return flow.sbp.broadcast
return flow.sbp.split(0)
model_file_state_dict = flow.utils.global_view.to_global(
state_dict, placement=model_file_placement, sbp=get_sbp,
) # 使用 sbp=get_sbp 处理特殊的键,也支持指定普通的 SBP。
rank_id = flow.env.get_rank()
# 保存模型分片的路径,一个 rank 对应一个路径。
state_dict_dir = "./graph_save_load_global_" + str(rank_id)
if flow.env.get_rank() in model_file_placement.ranks:
flow.save(
flow.utils.global_view.to_local(model_file_state_dict),
state_dict_dir,
)首先,将原模型(state_dict)转化到模型文件的 Placement 和 SBP 上,model_file_placement 为要分片保存模型的设备阵列,也就是将 state dict 按 split(0) 分片到 model_file_placement 上。
这里之所以自定义 get_sbp 函数,是因为用户可以传进来一个 (x, tensor) -> sbp 的函数来解决特殊 Tensor 对应不同 SBP 的需求。
举个例子(当前例子基于 Graph 模式),对于 state_dict["System-Train-TrainStep"] 这种 shape 为 [1] 的 Tensor,我们就不能按 split(0) 分片了,SBP 可以选用 broadcast。而 state_dict["module_pipeline"]["m_stage3.linear.weight"] 只能在第 1 维度切分,对于 state_dict["module_pipeline"]["m_stage3.linear.bias"] 这种不可切分的小 Tensor(s),SBP 可以选用 broadcast。这样支持用户 DIY SBP 的处理,更加灵活。
在后面的处理中,使用 flow.utils.global_view.to_local() 接口得到 model_file_state_dict 的本地分量,并调用 save() 保存模型。其中,state_dict_dir 是带有设备 id 的目录,需要区分不同设备,推荐一个 rank 对应一个路径,路径名用 rank id 的方式。
加载模型
在指定设备上分片保存模型后,加载模型的代码如下:
if cur_rank in model_file_placement.ranks:
local_state_dict = flow.load(state_dict_dir)
else:
local_state_dict = None
global_state_dict = flow.utils.global_view.to_global(
local_state_dict, placement=model_file_placement, sbp=get_sbp,
)
graph_model.load_state_dict(global_state_dict)首先,用 load() 方法在每个保存切片的设备上加载 state dict。对应的,需要把 local rank 上的 state dict 转换到模型文件的 placement 和 sbp 上,得到了 global_state_dict。这一步和保存模型应该是对应的,SBP 和 Placement 也是一致的。
最后,global_state_dict 可以成功加载到 graph_model(nn.Graph) 中。当然,nn.Module 和 nn.Graph 处理方法是一致的。
将 state dict 加载到 nn.Module 中
除了以上两个特征外,在将 state dict 加载到 nn.Module 时,OneFlow 提供了 SBP 和 Placement 的自动转换。
在下面的例子中,首先构造一个 m(nn.Module)对象,再将 global_state_dict 的 SBP 设置为 split(0),而 m 的 SBP 为 broadcast。同时 placement 也放生了变化,从 placement("cpu", ranks=[0, 1]) 到 flow.placement("cpu", ranks=[0])。这时用户不需要其他操作,OneFlow 会自动做 SBP 和 placement 的转换过程。
import oneflow as flow
m = flow.nn.Linear(2,6)
model_file_placement = flow.placement("cpu", ranks=[0, 1])
state_dict = "weight":flow.ones(3,2), "bias":flow.zeros(3)
global_state_dict = flow.utils.global_view.to_global(
state_dict, placement=model_file_placement, sbp=flow.sbp.split(0),
)
m.to_global(placement=flow.placement("cpu", ranks=[0]), sbp=flow.sbp.broadcast)
m.load_state_dict(global_state_dict)
print(m.state_dict())使用 2 卡运行上面的代码,可以看到,我们自己构造的字典中的全局张量,已经被加载到 m Module 中。此外,输出 OrderedDict 的 tensor 的 SBP 已经从 split(0) 自动转换为 broadcast,'weight' 对应 tensor 的形状也是我们期待的 [6, 2],'bias' 形状为 [6]。
OrderedDict([('weight', tensor([[1., 1.],
[1., 1.],
[1., 1.],
[1., 1.],
[1., 1.],
[1., 1.]], placement=oneflow.placement(type="cpu", ranks=[0]), sbp=(oneflow.sbp.broadcast,), dtype=oneflow.float32,
requires_grad=True)), ('bias', tensor([0., 0., 0., 0., 0., 0.], placement=oneflow.placement(type="cpu", ranks=[0]), sbp=(oneflow.sbp.broadcast,),
dtype=oneflow.float32, requires_grad=True))])3
一个完整示例
上面演示了如何分片保存和加载模型。在这一部分,提供一份完整的代码参考,下面的例子为 4 个 ranks 上的流水并行,模拟了模型分片保存和加载的过程。
import os
import numpy as np
import oneflow as flow
model_tensor_placement = flow.placement("cuda", ranks=[0, 1, 2, 3])
# model_file_placement 为存储模型分片的设备的 placement,表示在 Rank 2 和 Rank 3 上可为 None。
model_file_placement = flow.placement("cpu", ranks=[0, 1])
P0 = flow.placement(model_tensor_placement.type, ranks=[0])
P1 = flow.placement(model_tensor_placement.type, ranks=[1])
P2 = flow.placement(model_tensor_placement.type, ranks=[2])
P3 = flow.placement(model_tensor_placement.type, ranks=[3])
def get_sbp(state_dict, tensor):
if tensor is state_dict["System-Train-TrainStep"]:
return flow.sbp.broadcast
if tensor is state_dict["module_pipeline"]["m_stage3.linear.weight"]:
return flow.sbp.split(1)
if tensor is state_dict["module_pipeline"]["m_stage3.linear.bias"]:
return flow.sbp.broadcast
return flow.sbp.split(0)
class Stage0Module(flow.nn.Module):
def __init__(self):
super().__init__()
self.linear = flow.nn.Linear(16, 8)
self.relu = flow.nn.ReLU()
def forward(self, x):
return self.relu(self.linear(x))
class Stage1Module(flow.nn.Module):
def __init__(self):
super().__init__()
self.linear = flow.nn.Linear(8, 4)
self.relu = flow.nn.ReLU()
def forward(self, x):
return self.relu(self.linear(x))
class Stage2Module(flow.nn.Module):
def __init__(self):
super().__init__()
self.linear = flow.nn.Linear(4, 2)
self.relu = flow.nn.ReLU()
def forward(self, x):
return self.relu(self.linear(x))
class Stage3Module(flow.nn.Module):
def __init__(self):
super().__init__()
self.linear = flow.nn.Linear(2, 1)
def forward(self, x):
return self.linear(x)
# 模拟 4 个 ranks 上的流水并行
class PipelineModule(flow.nn.Module):
def __init__(self):
super().__init__()
self.m_stage0 = Stage0Module()
self.m_stage1 = Stage1Module()
self.m_stage2 = Stage2Module()
self.m_stage3 = Stage3Module()
self.m_stage0.to_global(placement=P0, sbp=flow.sbp.broadcast)
self.m_stage1.to_global(placement=P1, sbp=flow.sbp.broadcast)
self.m_stage2.to_global(placement=P2, sbp=flow.sbp.broadcast)
self.m_stage3.to_global(placement=P3, sbp=flow.sbp.broadcast)
def forward(self, x):
out_stage0 = self.m_stage0(x)
in_stage1 = out_stage0.to_global(placement=P1, sbp=flow.sbp.broadcast)
out_stage1 = self.m_stage1(in_stage1)
in_stage2 = out_stage1.to_global(placement=P2, sbp=flow.sbp.broadcast)
out_stage2 = self.m_stage2(in_stage2)
in_stage3 = out_stage2.to_global(placement=P3, sbp=flow.sbp.broadcast)
out_stage3 = self.m_stage3(in_stage3)
return out_stage3
class PipelineGraph(flow.nn.Graph):
def __init__(self, module_pipeline):
super().__init__()
self.module_pipeline = module_pipeline
self.module_pipeline.m_stage0.config.set_stage(0, P0)
self.module_pipeline.m_stage1.config.set_stage(1, P1)
self.module_pipeline.m_stage2.config.set_stage(2, P2)
self.module_pipeline.m_stage3.config.set_stage(3, P3)
self.config.set_gradient_accumulation_steps(2)
self.add_optimizer(
flow.optim.SGD(self.module_pipeline.parameters(), lr=0.001)
)
def build(self, x):
out = self.module_pipeline(x)
out = out.sum()
out.backward()
return out
def train_with_graph(call_cnt=0, state_dict_dir=None, last_state_dict=None):
# 形状为 [2, 16] 的固定输入张量
x = flow.tensor(
[
[
0.4286,
0.7402,
0.4161,
0.6103,
0.7394,
1.1330,
-0.2311,
-0.1013,
0.8537,
0.9757,
-0.9842,
0.3839,
-0.5551,
-0.8832,
0.7820,
0.7421,
],
[
-0.1581,
-1.0319,
1.8430,
0.3576,
0.7288,
-0.6912,
0.9966,
1.0840,
-1.1760,
1.5683,
-0.2098,
-1.6439,
-2.7049,
0.1949,
1.6377,
0.0745,
],
],
dtype=flow.float32,
placement=P0,
sbp=flow.sbp.broadcast,
)
module_pipeline = PipelineModule()
graph_model = PipelineGraph(module_pipeline)
cur_rank = flow.env.get_rank()
if call_cnt == 1:
if cur_rank in model_file_placement.ranks:
local_state_dict = flow.load(state_dict_dir)
else:
local_state_dict = None
# 使用 sbp=get_sbp 处理特殊的键
global_state_dict = flow.utils.global_view.to_global(
local_state_dict, placement=model_file_placement, sbp=get_sbp,
)
graph_model.load_state_dict(global_state_dict)
graph_model(x)
state_dict = graph_model.state_dict()
if call_cnt == 0:
model_file_state_dict = flow.utils.global_view.to_global(
state_dict, placement=model_file_placement, sbp=get_sbp,
)
if flow.env.get_rank() in model_file_placement.ranks:
flow.save(
flow.utils.global_view.to_local(model_file_state_dict),
state_dict_dir,
)
if __name__=="__main__":
rank_id = flow.env.get_rank()
# 保存路径,一个 rank 对应一个路径。
state_dict_dir = "./graph_save_load_global_" + str(rank_id)
# 保存模型
train_with_graph(0, state_dict_dir)
# 加载模型
train_with_graph(1, state_dict_dir)4
结语
本文从简单介绍大规模模型分片存储开始,最终演示了 OneFlow 的如何做模型分片保存和加载的过程,后续 OneFlow 的大模型分片存储的接口还会不断完善。
其他人都在看
 https://github.com/Oneflow-Inc/oneflow/
https://github.com/Oneflow-Inc/oneflow/以上是关于模型并行 | 大规模语言模型架构 Megatron的主要内容,如果未能解决你的问题,请参考以下文章