暴力拆解《Numerical Optimization》之信任域方法(下)——Dogleg(狗腿方法)
Posted xiaopihaierletian
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了暴力拆解《Numerical Optimization》之信任域方法(下)——Dogleg(狗腿方法)相关的知识,希望对你有一定的参考价值。
这一节,我们来介绍一下DogLeg方法。
还记得模型函数吗:
 = f_k + g_k^Tp+\\frac12p^TB_kp\\quad\\left \\| p \\right \\|\\leqslant \\bigtriangleup _k")
在Dogleg方法中,要求模型函数中的B必须是正定矩阵。至于为什么,先卖个关子,学完之后你自然就明白了。
现在我们正式开始学习吧~:
由于B是正定矩阵,那么,有前面几篇博客的介绍可知,在无约束条件下,模型函数 的极值在点
的极值在点 取到。那么,
取到。那么,

当
时,由于约束
的存在,我们可以把
看做一个很小的项:
那么,
的方强我们可以确定为
。
现在我们将结合这个方向和
方向在信任域内找一个适合的,能让
值下降方向。
我们再捋一捋之前的步骤:

a.若
,那么
b.若
的方向为
,目标函数的梯度负方向。
现在我们处在第二种情况。
现在我们知道方向了,但是我们还不知道步长,该怎么办呢?
柯西点中使用的步长是
的步长值,这里我们换一个方法,我们来讨论下面这个函数:
利用在前面介绍的方法,将这个函数对
求导,可以求得
。
面对我们现在的这种情况,将
的情况代入上面求出的
。
令
,
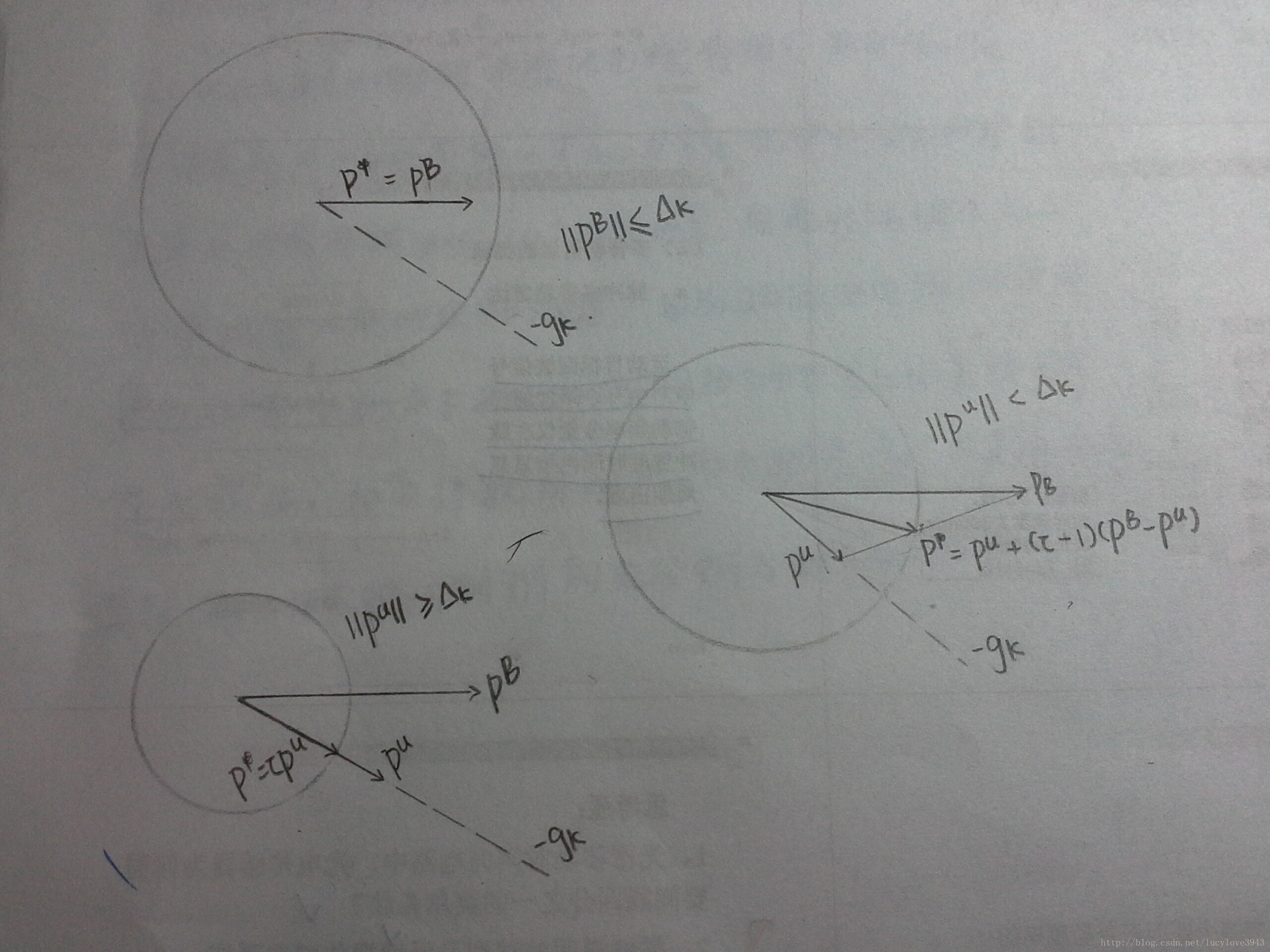
a.若
,那么,在信任域内,选择
为下降方向
b.若
,那么,令
,选择
为下降方向。
c.若
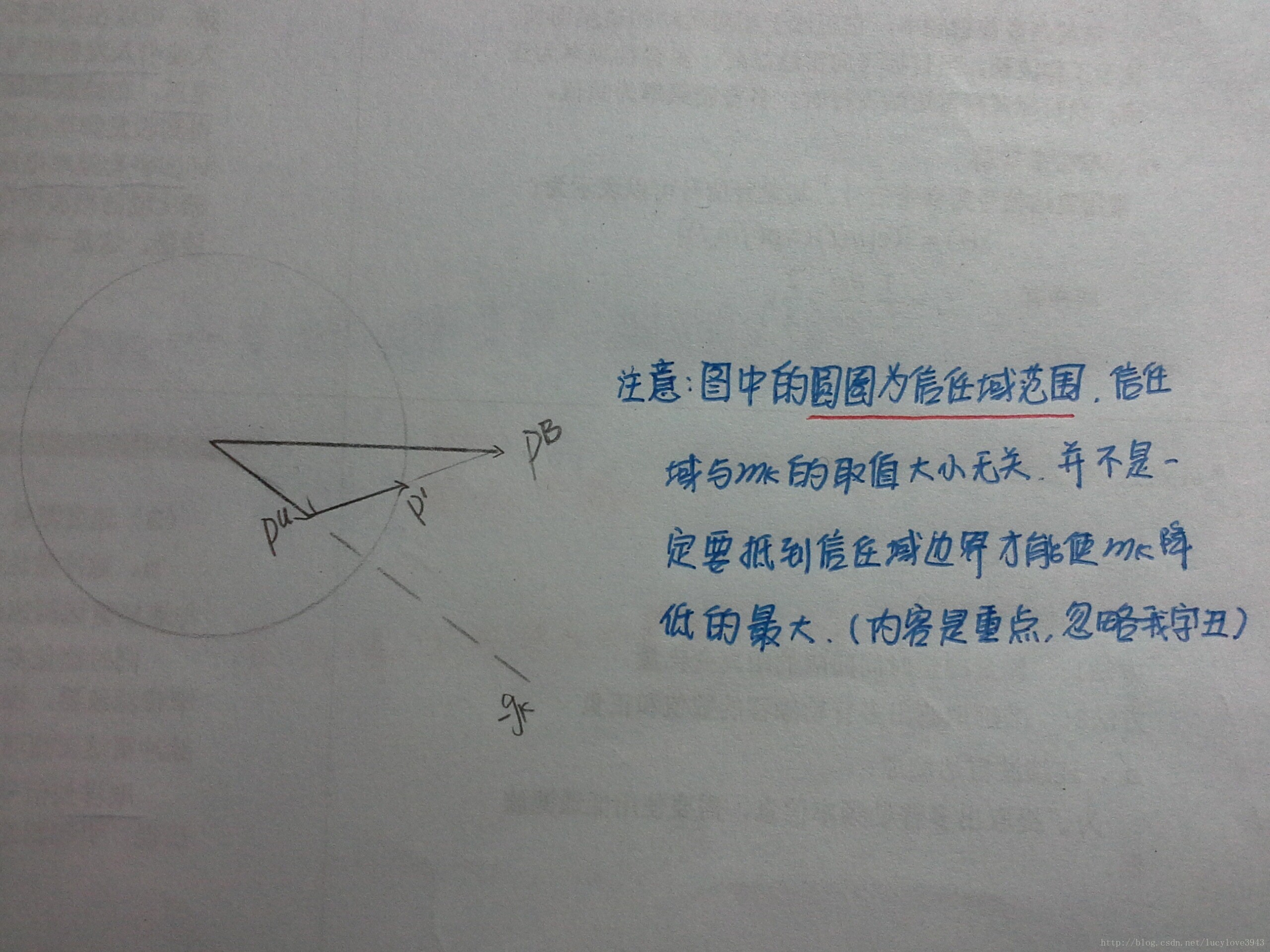
,那么,我们看下图
看到这个图,有没有产生这样一种想法,既然
看到这里就能理解为什么要叫DogLeg方法了吧,因为在
综上,
其中
的求解过程如下:
配图如下:
现在我们来解释为什么B一定要是正定矩阵:
因为若果B不是正定矩阵的话,

(p^B-p^u) & \\text 1\\leqslant \\tau \\leqslant 2 \\endcases")
(p^B-p^u) \\right \\| = \\bigtriangleup _k& \\text 1\\leqslant \\tau \\leqslant 2 \\endcases")
以上是关于暴力拆解《Numerical Optimization》之信任域方法(下)——Dogleg(狗腿方法)的主要内容,如果未能解决你的问题,请参考以下文章