<ROS;ROS Control之Transmission
Posted 小贝也沉默
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了<ROS;ROS Control之Transmission相关的知识,希望对你有一定的参考价值。
目录
1. 说在前面
在我上一篇博客上, 简单介绍了关于URDF和XACRO的东西. 利用现有的模型, 是能够很容易建立出一个现成的模型. 这里, 直接使用上一篇博客中提到的UR5 + Barrett(为了方便, 后面我都称之为ur5bh). 这篇博客的目的本来是想利用Gazebo + ROS Control + MoveIt! 让模型动起来, 但是在编辑的过程中, 为了让所有事情变得更清晰, 最终导致博客太长了, 预计分作几篇博客来完成这件事.
回顾:
第一篇 – 机器人描述: http://blog.csdn.net/sunbibei/article/details/52297524
本篇作为第二篇, 主要介绍在机器人描述文件中, 关于transmission相关的一些内容, 以及怎么将一个模型导入到Gazebo中.
该系列, 主要是以具体任务为向导, 将我所了解到的一些东西分享出来, 尽可能的让所有事情知其所以然. 如果有误或不清晰的地方, 还请指出来, 谢谢…
1.1. ROS Control
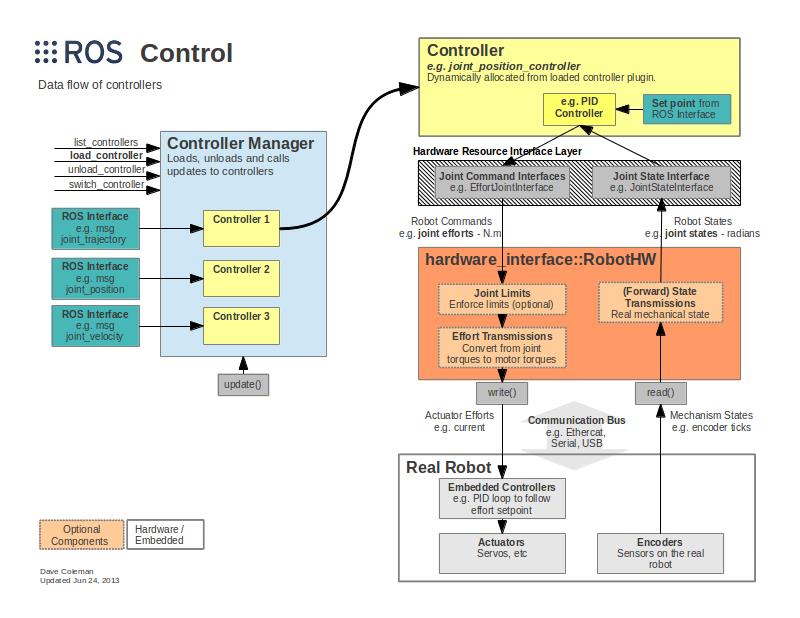
无论因为什么而做机器人相关的工作, 控制是绝对避开不了的一个话题. 怎么让机器人动起来, 或者怎么控制机器人上挂载的传感器等等问题, 如何避免不同控制器对硬件资源的冲突. 这些都是很繁琐的工作, 并且必然存在大量的重复工作. ROS Control为这些问题提出了一种解决方案, 当然, 其功能会更强大. ROS Control, 脱胎于pr2_mechanism, 在此基础上, 将其抽象, 使之成为一个框架, 而不限于pr2. 整体架构如下图所示. (pr2_mechanism也是一个很好的软件系统. 如果有时间, 后面也整理出来分享给大家)
1.2. 机器人 – ur5bh
既然是给定的任务, 那么必然需要一个载体. 后面都将统一使用下图模型.
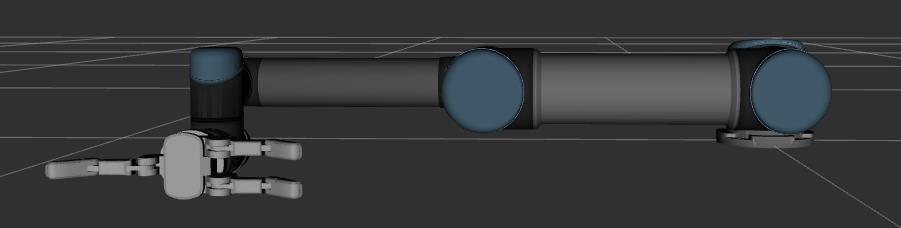
该模型的描述文件, 在第一篇博客中也提到了, 其实很简单. 就是如下所示的内容:
<?xml version="1.0"?>
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="ur5bh" >
<!-- common stuff -->
<xacro:include filename="$(find ur_description)/urdf/common.gazebo.xacro" />
<!-- ur5 -->
<xacro:include filename="$(find ur_description)/urdf/ur5.urdf.xacro" />
<!-- barrett hand -->
<xacro:include filename="$(find bhand_description)/urdf/bh282.urdf.xacro" />
<!-- arm -->
<xacro:ur5_robot prefix="" joint_limited="true"/>
<link name="world" />
<joint name="world_joint" type="fixed">
<parent link="world" />
<child link = "base_link" />
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</joint>
<!-- end effector -->
<xacro:bhand_macro parent="ee_link" name="bh">
<origin xyz="0.012 0.0 0.0" rpy="$pi/2.0 $pi/2.0 $pi/2.0"/>
</xacro:bhand_macro>
</robot>当然, 前述文件需要编译成功的话, 是需要依赖于你电脑上是有安装两个ROS Package – ur_dscription and bhand_description.
1.3. Step by Step
为了统一环境和路径这种, 后面, 我会记录我运行的每一步. 首先我在~/.bashrc中注释掉了自己的所有工作空间. 依次执行下列命令:
$ mkdir -p ~/csdn_ws/src && cd ~/csdn_ws/src
$ catkin_init_workspace
# 下载bhand包, 得到bhand_description
$ git clone -b hydro-devel https://github.com/RobotnikAutomation/barrett_hand.git
$ cd .. && catkin_make
$ echo "source ~/csdn_ws/devel/setup.bash" >> ~/.bashrc
$ source ~/.bashrc
$ cd ~/csdn_ws/src/ && catkin_create_pkg ur5bh_description ur_description bhand_description
$ cd ~/csdn_ws && catkin_make
$ mkdir src/ur5bh_description/urdf && cd src/ur5bh_description/urdf
$ gedit ur5bh.urdf.xacro上述命令很简单, 就不多作解释了吧? 最后打开编辑器之后, 将上述内容xml内容复制到该文本中, 保存. 另外, 如果在$ cd ~/csdn_ws && catkin_make这一步出现找不到ur_description包的错误, 在命令行里面通过apt-get来安装, 命令如下:
# 若提示ur_description包找不到的错误, 则执行下述命令
$ sudo apt-get install ros-indigo-ur-description
# 所有都OK的话, 可以用如下命令来查看模型效果
$ roslaunch urdf_tutorial xacrodisplay.launch model:=ur5bh.urdf.xacro如果没有问题, 最后使用urdf_tutorial包可以可视化模型, 就是前图所示的状态.
2. 解析URDF
想要搞清楚后面的事情, 读懂URDF文件是很重要的一件事情. 现在我们建立好了ur5bh, 可以通过如下命令, 将XACRO文件转换成URDF.
# 默认情况下rosrun xacro xacro.py ur5bh.urdf.xacro将会直接将所有转换后的内容输出到命令行
$ rosrun xacro xacro.py ur5bh.urdf.xacro >> ur5bh.urdf在该目录下, 将会在当前目录下生成一个ur5bh.urdf文件, 是解析之后得到的所有内容. 在使用过程中, 最终上传到ROS 参数服务器中的”robot_description”的内容一模一样. 我摘录其中值得说道的内容如下:
<gazebo>
<plugin filename="libgazebo_ros_control.so" name="ros_control">
<!--robotNamespace>/</robotNamespace-->
<!--robotSimType>gazebo_ros_control/DefaultRobotHWSim</robotSimType-->
</plugin>
</gazebo>
... ...
<transmission name="shoulder_pan_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="shoulder_pan_joint">
<hardwareInterface>PositionJointInterface</hardwareInterface>
</joint>
<actuator name="shoulder_pan_motor">
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
... ...
<transmission name="bh_j32_transmission">
<type>transmission_interface/SimpleTransmission</type>
<joint name="bh_j32_joint"/>
<actuator name="bh_j32">
<hardwareInterface>PositionJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
<motorTorqueConstant>1</motorTorqueConstant>
</actuator>
</transmission>其中第一条Tag gazebo的内容, 在文件的第一行, 作用是导入gazebo_ros_control, 如果该文件被Gazebo加载的话, Gazebo将会为该模型添加默认的Gazebo_ros_control库. 该库究竟有什么作用, 后面我会细说. 这儿我先详细解析一下, transmission是一个什么鬼. 其实从下面这张图中, 可以窥视一些端倪.
在前述ROS Control的数据流图中可以看得到, transmission是硬件抽象层中的一部分. 从图中可以看到, transmission的任务很清晰, 主要是两个方向的任务:
- Actuator <–> Joint: 定义Joint的Pos, Vel, Tor与Motor的Pos, Vel, Tor.
- State: 将编码器(例如角度, 力矩传感器等)的数据, 传递给对应的Joint, 变成最终的RobotState.
2.1. TransmissionInfo
此处所指的是第一种transmission. 每一个transmission主要由两部分构成, 从上面xml内容中也可以看出来, 分别是joint和actuator. 转换成代码, 如下所示(transmission_interface/transmission_info.h):
/**
* \\brief Contains semantic info about a given joint loaded from XML (URDF)
*/
struct JointInfo
std::string name_;
std::vector<std::string> hardware_interfaces_;
std::string role_;
std::string xml_element_;
;
/**
* \\brief Contains semantic info about a given actuator loaded from XML (URDF)
*/
struct ActuatorInfo
std::string name_;
std::vector<std::string> hardware_interfaces_;
std::string xml_element_;
;
/**
* \\brief Contains semantic info about a given transmission loaded from XML (URDF)
*/
struct TransmissionInfo
std::string name_;
std::string type_;
std::vector<JointInfo> joints_;
std::vector<ActuatorInfo> actuators_;
;2.2. TransmissionLoader
那这些信息又是怎么加载的呢? 以及, 每一个Tag里面的子Tag又是些什么鬼啊? 答案都可以在TransmissionLoader这个类里面找到答案. 这是一个抽象类, 实现的每一个Transmission的子类, 都要配套实现一个TransmissionLoader. 该基类的定义如下(只是摘录了部分):
class TransmissionLoader
public:
virtual ~TransmissionLoader()
typedef boost::shared_ptr<Transmission> TransmissionPtr;
virtual TransmissionPtr load(const TransmissionInfo& transmission_info) = 0;
protected:
enum ParseStatus
SUCCESS,
NO_DATA,
BAD_TYPE
;
... ...
static ParseStatus getActuatorReduction(
const TiXmlElement& parent_el,
const std::string& actuator_name,
const std::string& transmission_name,
bool required,
double& reduction);
static ParseStatus getJointReduction(
const TiXmlElement& parent_el,
const std::string& joint_name,
const std::string& transmission_name,
bool required,
double& reduction);
static ParseStatus getJointOffset(
const TiXmlElement& parent_el,
const std::string& joint_name,
const std::string& transmission_name,
bool required,
double& offset);
static ParseStatus getActuatorRole(
const TiXmlElement& parent_el,
const std::string& actuator_name,
const std::string& transmission_name,
bool required,
std::string& role);
static ParseStatus getJointRole(
const TiXmlElement& parent_el,
const std::string& joint_name,
const std::string& transmission_name,
bool required,
std::string& role);
中间省略了几个静态函数, 主要用以判断数据格式是否正确等. 上面是TransmissionLoader基类的定义, 其中包含一个纯虚函数. 其他都是一些工具函数. 其中关于几个子标签的数据读取, 其中mechanicalReduction在getActuatorReduction()中读取, 源码如下, 类似的, Joint也是可以有mechanicalReduction标签的. 除了这个标签外, Actuator和Joint还可以有role标签, joint还有一个独有的标签offset.
TransmissionLoader::ParseStatus
TransmissionLoader::getActuatorReduction(
const TiXmlElement& parent_el,
const std::string& actuator_name,
const std::string& transmission_name,
bool required,
double& reduction )
// Get XML element
const TiXmlElement* reduction_el =
parent_el.FirstChildElement("mechanicalReduction");
if(!reduction_el)
if (required)
ROS_ERROR_STREAM_NAMED("parser",
"Actuator '" << actuator_name << "' of transmission '"
<< transmission_name <<
"' does not specify the required <mechanicalReduction> element.");
else
ROS_DEBUG_STREAM_NAMED("parser",
"Actuator '" << actuator_name << "' of transmission '"
<< transmission_name <<
"' does not specify the optional <mechanicalReduction> element.");
return NO_DATA;
// Cast to number
try
reduction = boost::lexical_cast<double>(reduction_el->GetText());
catch (const boost::bad_lexical_cast&)
ROS_ERROR_STREAM_NAMED("parser",
"Actuator '" << actuator_name << "' of transmission '"
<< transmission_name <<
"' specifies the <mechanicalReduction> element, but is not a number.");
return BAD_TYPE;
return SUCCESS;
2.3. SimpleTransmission
transmission的类型是transmission_interface/SimpleTransmission, 实质是指transmission_interface::SimpleTransmission类, 该类完成简单的传递, 定义如下:
class SimpleTransmission : public Transmission
public:
SimpleTransmission(const double reduction,
const double joint_offset = 0.0);
void actuatorToJointEffort(
const ActuatorData& act_data,
JointData& jnt_data);
void actuatorToJointVelocity(
const ActuatorData& act_data,
JointData& jnt_data);
void actuatorToJointPosition(
const ActuatorData& act_data,
JointData& jnt_data);
void jointToActuatorEffort(
const JointData& jnt_data,
ActuatorData& act_data);
void jointToActuatorVelocity(
const JointData& jnt_data,
ActuatorData& act_data);
void jointToActuatorPosition(
const JointData& jnt_data,
ActuatorData& act_data);
// 从代码中看到, 强制要求只能有一个Actuator和一个Joint
// 后面在TransmissionLoader中也会对其进行判错.
std::size_t numActuators() const return 1;
std::size_t numJoints() const return 1;
double getActuatorReduction() const return reduction_;
double getJointOffset() const return jnt_offset_;
private:
double reduction_;
double jnt_offset_;
;SimpleTransmission是建模Actuator和Joint通过减速器(reductor)或放大器(amplifier), 结构图如下:

上图是SimpleTransimission的典型建模场景. 各个关系如下所示:
| Type | Effort | Velocity | Position |
|---|---|---|---|
| Actuator to Joint | τj=nτa | x˙j=x˙an | xj=xan+xoff |
| Joint to actuator | τa=τjn | x˙a=nx˙j | xa=n(xj−xoff) |
其中:
- 公式中 x , x˙ and τ 分别代表 position, velocity and effort.
- 下标 a and j 用来标记actuator 和 joint.
- xoff 标记电机与joint zeros之间的偏移量(用joint position值表示).
-
n
是传递比例(the transmission ratio), 能够通过传动带的输入输出半径之比或齿轮的齿数来计算.
- 若 n>1 , 则这个系统是速度减速器/力矩放大器; 若