首次飞行和调校
Posted EmotionFlying
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了首次飞行和调校相关的知识,希望对你有一定的参考价值。
文章目录
前言
本节涵盖了你第一次飞行需要了解的信息,以及一些基本配置,以使你的旋翼机能合理地飞行。
在这个"首次飞行检查"的视频中也涵盖了其中的一些内容。
请按照下面的每个链接进行操作。
- Pre-arm Safety Check
- Arming and Disarming
- Pre-Flight Checklist
- Getting Off the Ground – Tips for New Operators
- Tuning
- Measuring Vibration
- Setting Hover Throttle
- Save Trim & Auto Trim
- Thrust Loss and Yaw Imbalance Warnings
- Indoor Flying
5.1 预解锁安全检查
篇幅过多,另起一篇介绍:
5.2 解锁和加锁
篇幅过多,另起一篇介绍:
5.3 飞行前检查清单(Copter)
篇幅过多,另起一篇介绍:
5.4 给新飞行员的建议
篇幅过多,另起一篇介绍:
5.5 调优
在默认的 PID 设置下,ArduPilot 可以在开箱后安全地飞行大多数遥控飞行器。要想飞得好,在风中有严密的导航和可靠的性能,你要调整你的自动驾驶仪参数。下面的主题告诉你如何做。
- Tuning Process Instructions
- Setting the Aircraft Up for Tuning
- Mission Planner Helper
- Initial Tuning Flight
- Evaluating the Tune
- Manual Tuning
- AUTOTUNE
- Input Shaping
- Transmitter Based Tuning
- Configuring Notch Filtering
- Configuring In-Flight FFT
5.6 测量振动
篇幅过多,另起一篇介绍:
5.7 设置悬停油门
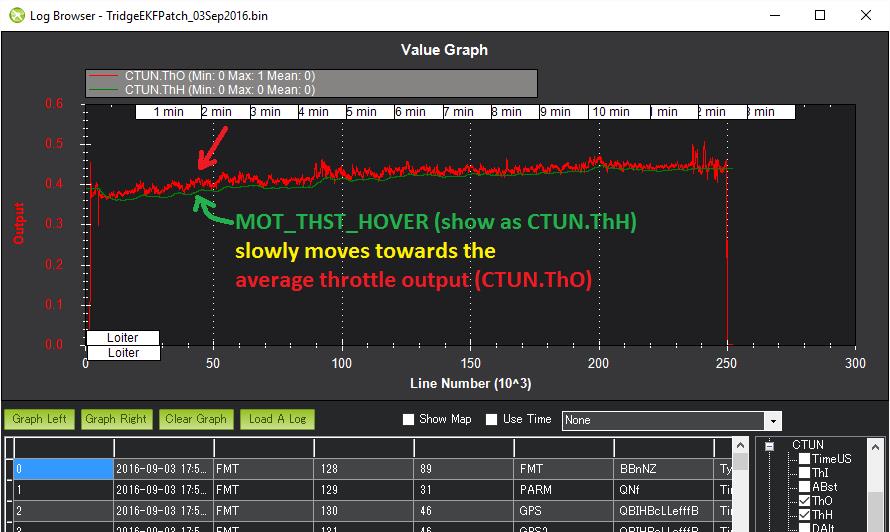
Copter 包括自动学习悬停油门(以前称为"中油门"),只要飞行器在非手动飞行模式下(即除自稳和 Acro 外的所有模式)保持稳定的悬停,MOT_THST_HOVER 值将慢慢向平均电机输出移动。
如果你想手动设置 MOT_THST_HOVER 值,最好是下载一个数据闪存日志,并将该值设置为 CTUN.ThO 字段中的内容。这个值应该在 0.2 和 0.8 之间。
如果由于某种原因,你希望禁止学习,你可以将 MOT_HOVER_LEARN 参数设置为 0。
5.8 保存微调和自动微调
篇幅过多,另起一篇介绍:
5.9 推力损失和偏航不平衡警告
篇幅过多,另起一篇介绍:
5.10 室内飞行指南
篇幅过多,另起一篇介绍:
Swift-020无人机在日本进行首次自主飞行演示
8月2日报道,Swift工程公司与日本神户Kobe计算机研究所合作开发的的Swift020垂直起降无人机在日本神户进行了首次自主飞行演示。这种垂直起降无人机无需额外设备即可在空中过渡至固定翼飞行模式。Swift020可以用于各种领域,包括基础设施监测,石油和天然气监测,海事任务,紧急服务,快递业务,农业,科学研究,安全监视等。该无人机采用电力推进,续航时间2小时,有效载荷1公斤。

-
客服号
以上是关于首次飞行和调校的主要内容,如果未能解决你的问题,请参考以下文章