ROS 机器人操作系统:版本说明
Posted 阿基米东
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS 机器人操作系统:版本说明相关的知识,希望对你有一定的参考价值。
ROS 和 ROS2
由于历史原因,ROS 有两个大版本 —— ROS1(通常用 ROS 替代)和 ROS2,两者的差别如下图所示。
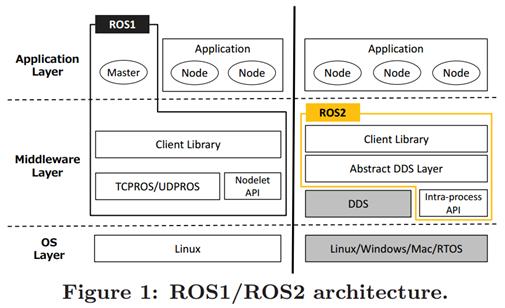
我们知道 ROS 始于2007年11月,最早是“柳树车库”用于 PR2 机器人的开发,同时希望 ROS 能用于其他机器人。因此,柳树车库花费了大量精力定义了抽象级别(通常是通过消息的接口),允许软件重用。按照最初的设想,ROS 是用于单个机器人、板载工作站级别的计算资源、没有实时性需求,以及理想的网络连接场景的学术研究项目。ROS 强调最大的灵活性,没有过多的约定或者禁止。
然而,出乎意料的是,ROS 发布以来就被应用于各种各样的机器人,包括轮式机器人、腿式机器人、工业手臂、室外无人车辆、自动驾驶汽车、无人机、无人艇等等。随着大量基于 ROS 的产品进入市场,比如制造业机器人、农业机器人、商业清洁机器人等,甚至连 NASA 也将运行 ROS 的 Robonaut 2 部署到国际空间站。ROS 已经从最初的学术研究项目,演变成一个工业界应用广泛的商业项目,已经成为机器人领域的事实标准。
随着应用场景的扩大,ROS 最初设计时的局限性已经难以满足更多新需求。比如说实时性和网络延迟,以及 ROS 严重依赖 Ubuntu 系统,导致无法在小型嵌入式平台运行等等。因此,社区开发者对新一代 ROS 的呼声越来越大,ROS2.0 的消息也不绝于耳。
在 ROSCon 2014 上,新一代 ROS 的设计架构(Next-generation ROS:Building on DDS)正式公布。2015年8月第一个 ROS2.0 的 Alpha 版本落地,2016年12月 ROS2.0 的 Beta 版本正式发布,2017年12月8日,万众瞩目的 ROS2.0 终于发布了第一个正式版 —— Ardent Apalone。
ROS2 的核心是 DDS(Data Distribution Service,数据分发服务),它是由对象管理组织 OMG(Object Management Group)在 2014 年发布的一种专门为实时系统设计的数据分发/订阅标准。关于 DDS 的更多介绍我们将在后面进行讲解。
版本代号
Ubuntu 和 ROS1 部分版本对应关系及官方支持结束时间如下表所示。
| Ubuntu | ROS1 | 发布时间 | 支持期限 |
|---|---|---|---|
| 14.04 LTS | Indigo Igloo | 2014年5月 | 2019年4月 |
| 16.04 LTS | Kinetic Kame | 2016年5月 | 2021年4月 |
| 18.04 LTS | Melodic Morenia | 2018年5月 | 2023年5月 |
| 20.04 LTS | Noetic Ninjemys | 2020年5月 | 2025年5月 |
| 22.04 LTS | - | - | - |
Ubuntu 和 ROS2 部分版本对应关系及官方支持结束时间如下表所示。
| Ubuntu | ROS2 | 发布时间 | 支持期限 |
|---|---|---|---|
| 18.04 LTS | Crystal Clemmys | 2018年12月 | 2019年12月 |
| 18.04 LTS | Dashing Diademata | 2019年5月 | 2021年5月 |
| 20.04 LTS | Foxy Fitzroy | 2020年6月 | 2023年5月 |
| 22.04 LTS | Humble Hawksbill | 2022年5月 | 2027年5月 |
更多 >> ROS Distributions、ROS2 Distributions
以上是关于ROS 机器人操作系统:版本说明的主要内容,如果未能解决你的问题,请参考以下文章