C++编程中的system终端命令与thread并行基础和进阶(含ROS2 CLI)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了C++编程中的system终端命令与thread并行基础和进阶(含ROS2 CLI)相关的知识,希望对你有一定的参考价值。
由简单到复杂一步一步来吧。
hello ros2为例:
#include <iostream>
using namespace std;
int main ()
cout << "Hello ros2!" << endl;
system("pause");
return 0;
此处使用的是:
system("pause");
linux下会出现:

这种方式适合windows环境^_^
沉迷机器人操作系统的一个理由和四种修仙秘籍(更新ROS 2.0内容)
那怎么办?改一个支持的就行啦,比如date:
#include <iostream>
using namespace std;
int main ()
cout << "Hello ros2!" << endl;
system("date");
return 0;
妥妥的显示时间:

终端支持的命令都是可以的^_^
来个复杂一点的,启动ROS2的小乌龟可以吗?
#include <iostream>
using namespace std;
int main ()
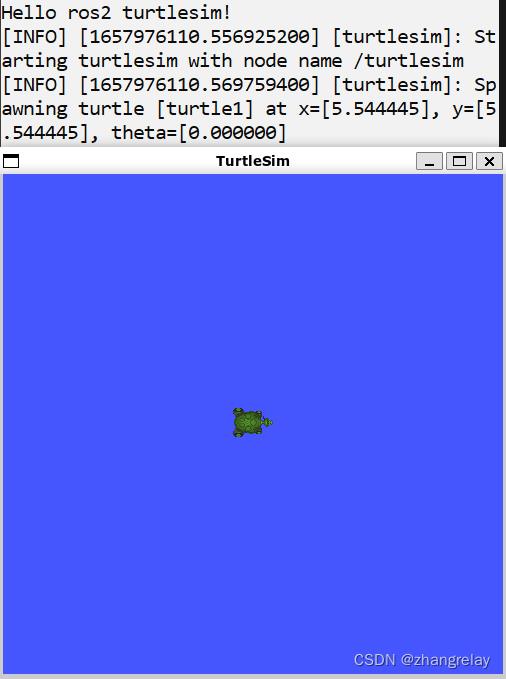
cout << "Hello ros2 turtlesim!" << endl;
system("ros2 run turtlesim turtlesim_node");
return 0;
完美启动,如下:
可不可以同时运行多条指令起到launch的作用呢?
试试看吧:
#include <iostream>
using namespace std;
int main ()
cout << "Hello ros2 turtlesim!" << endl;
system("ros2 run turtlesim turtlesim_node");
system("ros2 run turtlesim turtle_teleop_key");
return 0;
不行哦,需要关闭一个才能开启下一个。
那怎么办呢???
参考之前这篇博文:
程序如下:
#include <iostream>
#include <thread>
using namespace std;
void turtlesim_node()
system("ros2 run turtlesim turtlesim_node");
void turtle_teleop_key()
system("ros2 run turtlesim turtle_teleop_key");
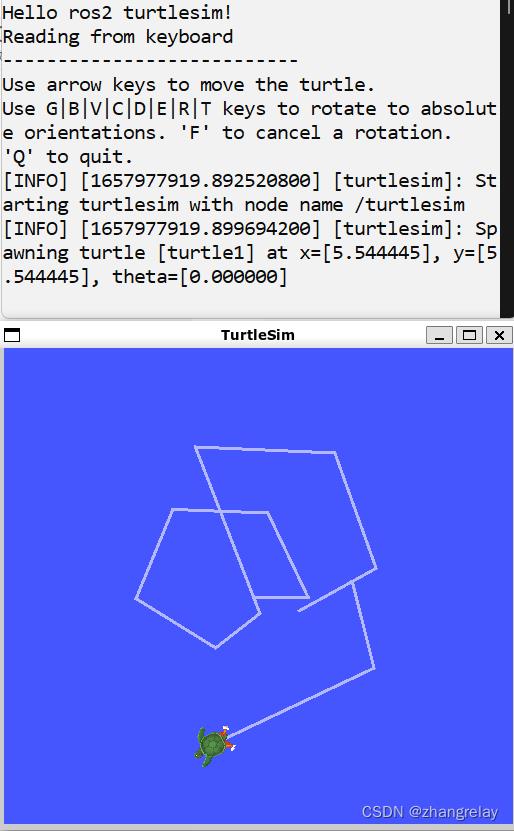
int main ()
cout << "Hello ros2 turtlesim!" << endl;
thread th1(turtlesim_node);
thread th2(turtle_teleop_key);
th1.join();
th2.join();
return 0;
同样,这样就可以启动多个ROS1/ROS2节点。
基本概念:
system() 用于从 C/C++ 程序调用操作系统命令。
注意:需要包含 stdlib.h 或 cstdlib 才能调用系统。
使用 system(),如果操作系统允许,可以执行任何可以在终端上运行的命令。 例如,可以在 Windows 上调用 system(“dir”) 并调用 system(“ls”) 来列出目录的内容。
编写一个可以编译和运行其他程序的 C/C++ 程序?
可以使用 system() 从我们的程序中调用 gcc。 请参阅下面为 Linux 编写的代码。 可以轻松更改代码以在 Windows 上运行。
多线程支持是在 C+11 中引入的。 在 C++11 之前,必须在 C 中使用 POSIX 线程或 p 线程库。虽然这个库完成了这项工作,但缺乏任何标准语言提供的功能集会导致严重的可移植性问题。 C++ 11 取消了所有这些,并为提供了 std::thread。 线程类和相关函数在线程头文件中定义。
std::thread 是 C++ 中表示单个线程的线程类。 要启动一个线程,只需要创建一个新的线程对象并将要调用的执行代码(即可调用对象)传递给对象的构造函数。 创建对象后,将启动一个新线程,该线程将执行 callable 中指定的代码。
可调用对象可以是三个中的任何一个
- 函数指针
- 一个函数对象
- 一个 lambda 表达式
定义可调用对象后,将其传递给构造函数。
以上是关于C++编程中的system终端命令与thread并行基础和进阶(含ROS2 CLI)的主要内容,如果未能解决你的问题,请参考以下文章
Unity中的异步编程——在Unity中使用 C#原生的异步(Task,await,async) - System.Threading.Tasks
FTXUI按键和ROS2 CLI组合使用笔记(turtlesim+teleop)
Xamarin.Forms 中的 Device.StartTimer 与 System.Threading.Timer [关闭]