Nvidia AGX Xavier GMSL 自动驾驶控制器设计方案
Posted 信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Nvidia AGX Xavier GMSL 自动驾驶控制器设计方案相关的知识,希望对你有一定的参考价值。
信迈科技的AGX Xavier GMSL 载板,是一款带有×GMSL视频输入接口的嵌入式人工智能计算产品,能够为众多终端设备赋予人工智能计算力,从而有效降低人工智能产品的落地门槛。Xavier能够提供高达32Tops计算能力,能够很好的满足低速无人驾驶,工业机器视觉等场景的图像、激光点云等计算需求。
自动驾驶技术,环境感知是其关键,神经网络算法则是核心。随着自动驾驶技术的大面积落地,传统的通用处理器已不能很好地满足需求,于是专门面向自动驾驶领域的处理器应运而生。在AI和自动驾驶的浪潮下,英伟达也积极转型,将业务中心由图像运算转向了人工智能运算以及自动驾驶。

从2015年起,NVIDIA就发布了Drive系列针对自动驾驶自动驾驶专用芯片和计算平台。 通过借鉴人类数十年来在 AI 领域积累的经验,NVIDIA DRIVE™ 硬件和软件解决方案提供行业领先的性能,旨在帮助汽车制造商、卡车制造商、一级供应商和初创公司开发出自动驾驶汽车。但是一直以来NVIDIA Drive自动驾驶平台以高昂的价格,让很多低速无人车、无人船、高速无人车的制造商望而却步。
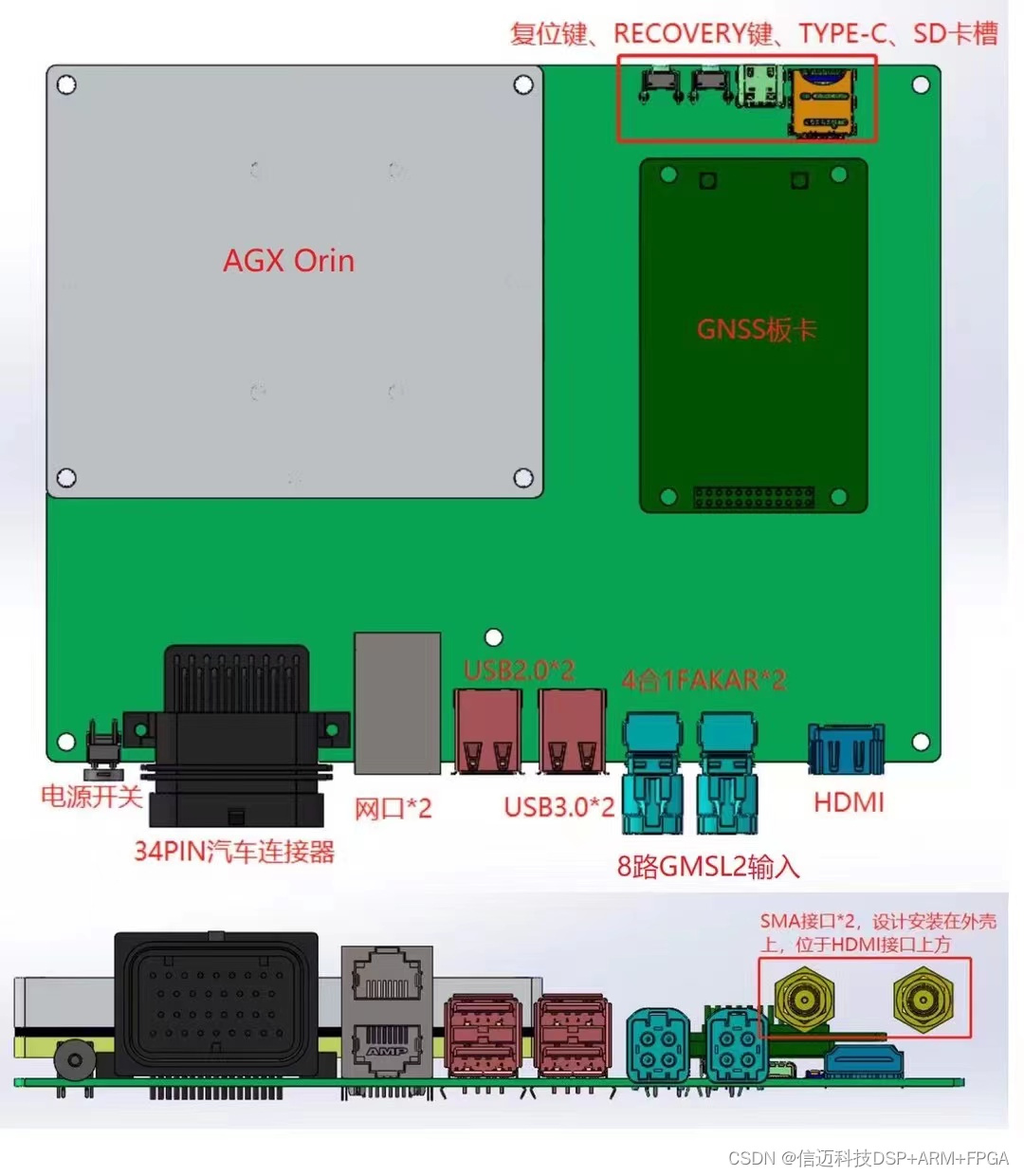
针对自动驾驶强劲的市场需求,信迈科技近期推出自动驾驶计算平台GEAC91V。该平台基于NVDIA Jetson AGX Xavier嵌入式GPU模组开发的面向车载应用场景的多处理器控制器,内置双Xavier模组、车规级MCU处理器、CPLD等多种处理器,满足车载应用场景复杂的高实时性、高可靠性需求。
产品特色
-双Xavier处理器,工作在Root-Endpoint模式下
-内置车规级MCU处理器,运行满足车规要求的安全系统
-内置硬件授时同步电路,为自动驾驶车载系统提供安全可靠的时钟源
-主要接口资源∶12路GMSL2接口,支持每路独立触发;12路CAN总线接口,2路 LN接口,2踏干兆车载以太网,1路万兆以太网,支持激光需达的Encoder信号接入,支持主备双路供电电源,支持PPS、GPRMC、Tiger,PTP等常用的对外授时接口;主要接口为车规级或M12工规级
-整机防护等级IP67,
-工作温度-20~60°,满足36ms-1000z随机振动要求
- MTBF∶50000小时
-满足CE-EMC认证标准接口

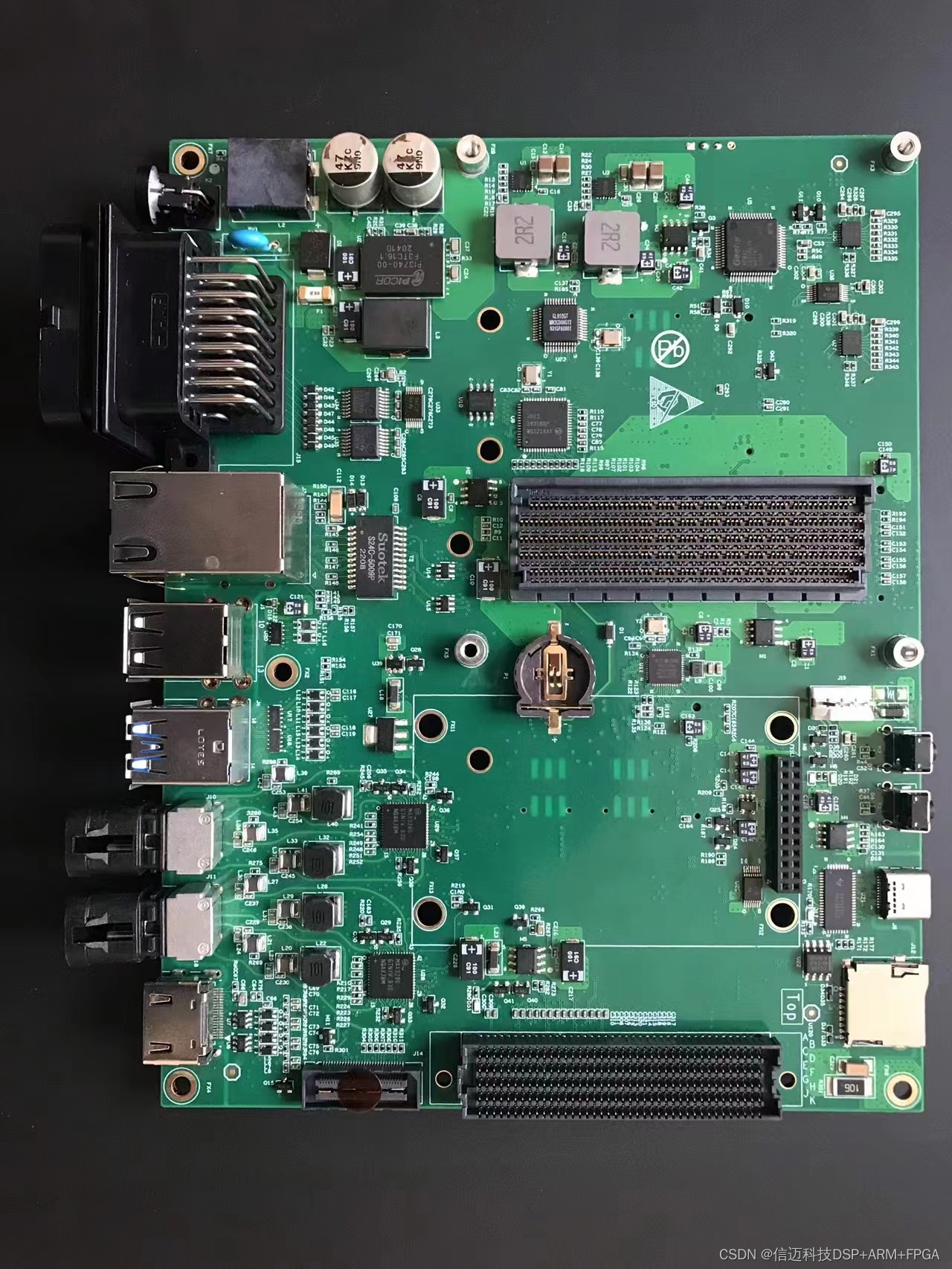


基于NVIDIA Jetson Xavier AGX GMSL硬件设计与软硬件调试
一、设计目标
1. 支持Jetson Xavier AGX Devkit 开发套件120Pin (QSH-060-01-H-D-A-K-TR Samtec)
2. GMSL Deserializer 采用 MAX9296
3. 支持多路 MAX9295 Serializer 相机
4. 同时兼容MAX96705即GMSL1
5. 支持Virtual Channel
6. 支持Frame sync和独立触发Trigger
二、硬件设计简要说明
1. Deserializer 解串器选择MAX9296 支持6Gbps,传输速率更高、可支持Sensor像素更高、帧率快
2. 硬件在POC段的设计需向下兼容GMSL1(按照Maxim默认设计不支持GMSL1)
3. 8路摄像头的同步触发设计?
4. GMSL摄像头与其他传感器的同步方案?
5. I2C总线与I2C扩展IC 选型
6. 物料选型特别是电感等
分享两个硬件设计框图

MAX9296/95.png

D3.png
三、软件调试踩坑记录
1. 先不接GMSL相机,读写MAX9296 I2C寄存器是否正常;
问题:I2C不通, 检查MAX9296 供电、PWDN、晶振、地址选择等
2. 接入MAX9295相机,读写MAX9295寄存器是否正常;
问题:I2C不通,检查相机12V供电、MAX9296初始化参数是否成功
3. 查看 /dev/video 设备是否已生成 ;
4. 检查Pipeline lock寄存器、Video link detect和lock 寄存器;
4. 根据配置RAW/YUV Sensor,选择不同的命令打开摄像头;
5. 检查确认摄像头端的MFP配置,比如同步MFP GPIO Pin;
6. 检查同步触发配置,如果同步异常,则需要测量相关MFP信号是否设置成功
四、总结
1. GMSL相较于FPDLINK 其应用稳定性、产品应用范围、价格供货等有比较多优势;
2. 除了美信,日厂ROHM 也已涉足GMSL SerDes 芯片,并有成熟芯片在推广应用;
3. GMSL 串行器和解串器的设计与调试需要一定的时间与经验累积,不然会走不少的弯路;
以上是关于Nvidia AGX Xavier GMSL 自动驾驶控制器设计方案的主要内容,如果未能解决你的问题,请参考以下文章
Jetson AGX Xavier JetPack 4.2环境配置