水下拖体运动特征及定位
Posted xiaokcehui
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了水下拖体运动特征及定位相关的知识,希望对你有一定的参考价值。
在海洋测量中,水下拖曳设备被用来获取深度、磁力等属性值,比如Klein5000和G882,但它在水下无法接收空中电磁波信号,故无法直接利用卫星定位技术测定水下三维坐标。为实现空间位置信息与属性测量信息融合,国内外通常做法是在测船上增加若干辅助装置,如惯导仪、压力深度仪、声学高度计、超短基线定位系统和多普勒流剖面仪等以提高其水下载体的定位精度。这些辅助设备费用较高,测量中需实时拆卸,且其维修和安装较为复杂,因此并未成为测量船通用配置和水下拖体定位的基本手段。
解决水下拖体定位问题主要是借助主载体(测量船)定位信息确定辅助载体(拖曳设备)位置,即由船载GPS位置来推算水下拖体位置。相关学者进行了研究分析。考虑到拖曳设备与定位天线的方位和距离受测船航速航向、海流流速流向等影响,有的采用“超短基阵”声定位法获取测定的准确位置。针对海洋磁力测量需求,有的提出了拖鱼位置确定的直接概算法和拖曳概算法。根据海流和航速动态环境下对拖体定位的影响,有的提出了航速变化和海流对拖体定位的补偿模型,进一步研究了磁力仪拖鱼入水深度控制方法。
我们单位的齐珺博士从流体力学、运动学等物理方法考虑,建立顾及测船运动、海流等作用的拖曳设备位置确定模型,旨在为提高水下拖曳设备位置确定精度提供参考和依据。由于他的文章有太多的公式和推导,我们静静地绕过,直接看如下的结论:
(1)测船匀速直线航行的分析表明,水下拖缆形状并非直线形态,而呈一定程度曲线形状;水下拖体空间位置在横向上无偏移,垂向(深度)上也基本保持不变。
(2)测船变速航行的分析表明,①测船横向振荡航行时,拖体也作横向振荡运动,但拖体振幅明显小于测船振幅,且拖体深度略有小幅上升变化②测船纵向振荡航行时冰下拖体X方向(沿船向)位置发生改变,同时造成深度呈现周期性升沉变化,且造成拖体深度变化范围要大于测船横向振荡对拖体的深度变化;③测船垂向振荡航行时,拖体X方向位置发生扩张或压缩,同时深度呈现较大幅度升沉,且造成拖体深度变化范围要远大于横向振荡和纵向振荡对拖体的深度变化。
(3)海流对拖体位置确定影响的分析表明,当海流与测线夹角(锐角)越小时,拖体横向偏移越小,垂向偏移(深度)越大。对于两互补方向的海流,在钝角时Y方向(垂直船向)偏移较大,Z方向(垂直方向)深度较大;在海流作用下,拖缆在各方向上偏移明显呈曲线形状;与测船振荡的作用相比,海流对水下拖体位置影响作用更明显,需进行相应改正。建议进行高精度水下拖体定位时,可采取船载式ADCP随船实时测流辅助水下拖曳设备定位的工作模式。
从理论指导时间的角度来说,在浅水测量中,获得更为准确的拖体图像和定位的方法是尽量让船舶保持匀速直线航行,即便如此,水下拖体还受到海流的影响,需要增加辅助水下定位系统比如超短基线USBL来获取较高的定位精度。
在深水测量中,超短基线USBL是水下拖体的标配,这是与浅水测量不同的显著特征。
下面简单介绍一篇文章《深拖水下定位系统解析》。
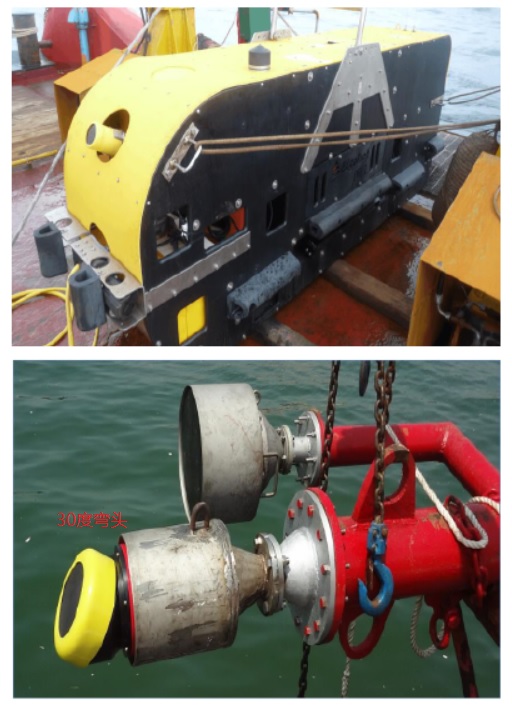
文中使用的超短基线是Ranger 2 USBL,其发射接收机 Type 8142-001 换能器自带 30°的弯角,能实现远距离(6000-7000m)跟踪拖曳设备,保障其定位精度。
超短基线的换能器一般侧挂安装,安装完成以后,需要进行安装参数校准。
深拖 USBL 水下定位系统校准测量在深水井场调查 BY28-1-1(1270m)海域处进行,作业船是南海救助局 169 船,该船是常规动力船舶。到达作业工区后首先测量声速剖面,投放定位信标 DPT ,通过 Ranger 2采集软件跟踪海床的 DPT 信标,然后在以 DPT 为中心,600m 距离为半径的范围内设计测线采集校准数据。校准完成以后,软件自动将校准参数导入。
深拖调查作业中,Ranger 2 水下定位系统校准后的拖体轨迹对比见下图。
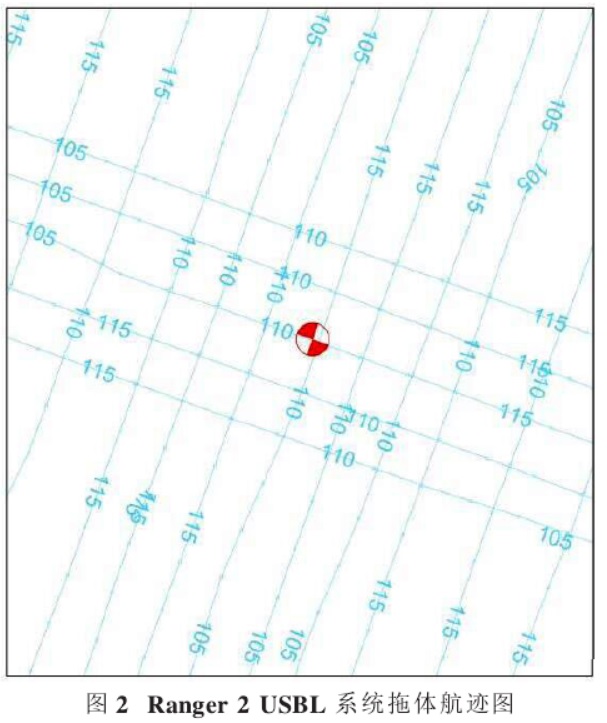
深水井场作业水深 1270m,释放铠装电缆长度 2918m,拖体离海底高度 40-60m。水下定位信标信号记录的拖体位置跳跃很小,精度很高,航迹上显示很平整。
以上是关于水下拖体运动特征及定位的主要内容,如果未能解决你的问题,请参考以下文章