YOLO系列梳理初尝新鲜出炉的YOLOv6
Posted CV技术指南(公众号)
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了YOLO系列梳理初尝新鲜出炉的YOLOv6相关的知识,希望对你有一定的参考价值。
前言 近日,美团视觉智能部开源了YOLOv6的框架。YOLOv4、YOLOv5更多是注重于数据增强,而对网络结构的改动则比较少。和YOLOv4、YOLOv5不同,YOLOv6对网络结构的改动还是蛮大的。
欢迎关注公众号CV技术指南,专注于计算机视觉的技术总结、最新技术跟踪、经典论文解读、CV招聘信息。
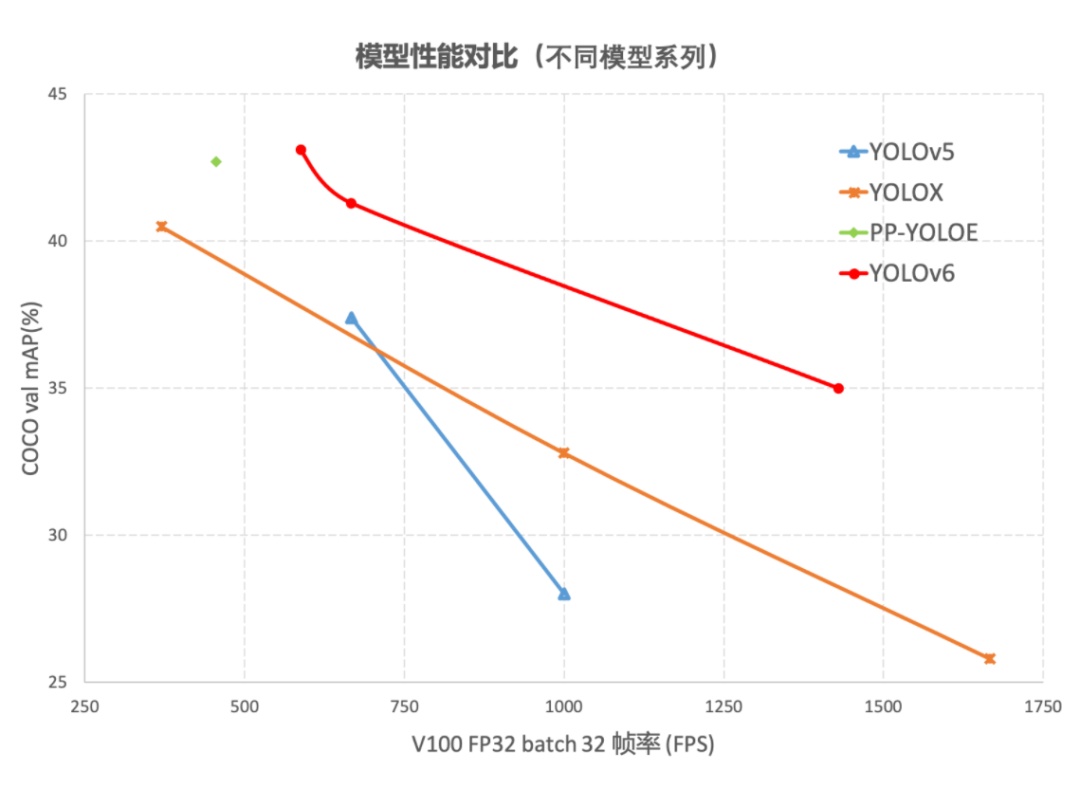
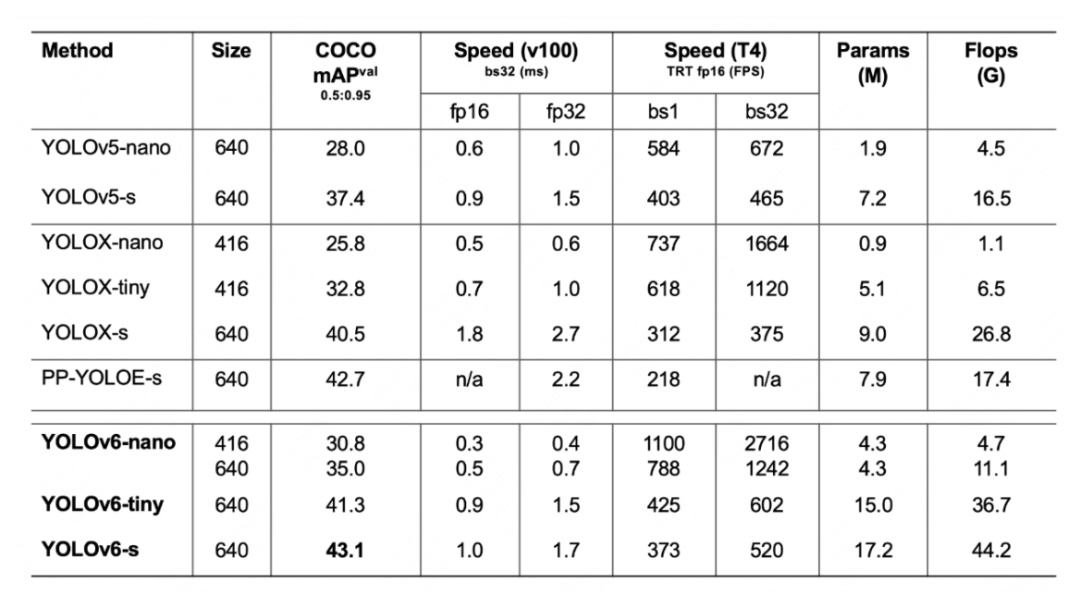
从YOLOv6的报告来看,它的性能也是再创新高。YOLOv6-s在COCO上精度达到了43.1%AP,在T4上推理速度也高达520FPS!此外,YOLOv6不仅仅关注于学术界所重点关注的AP、FPS指标,对于工业界也是十分友好。在部署方面它提供了TensorRT、NCNN、OPENVINO等平台的部署。
YOLOv6的关键技术
YOLOv6的Backbone不再使用Cspdarknet,而是转为比Rep更高效的EfficientRep;它的Neck也是基于Rep和PAN搭建了Rep-PAN;而Head则和YOLOX一样,进行了解耦,并且加入了更为高效的结构。
值得一提的是,YOLOv6也是沿用anchor-free的方式,抛弃了以前基于anchor的方法。
除了模型的结构之外,它的数据增强和YOLOv5的保持一致;而标签分配上则是和YOLOX一样,采用了simOTA;并且引入了新的边框回归损失:SIOU。这样看来,YOLOv6可谓是结合了两者的优良点。
Backbone
我们知道,YOLOv5和YOLOX都是采用多分支的残差结构CSPNet,但是这种结构对于硬件来说并不是很友好。所以为了更加适应GPU设备,在backbone上就引入了ReVGG的结构,并且基于硬件又进行了改良,提出了效率更高的EfficientRep。
RepVGG为每一个3×3的卷积添加平行了一个1x1的卷积分支和恒等映射的分支。这种结构就构成了构成一个RepVGG Block。和ResNet不同的是,RepVGG是每一层都添加这种结构,而ResNet是每隔两层或者三层才添加。RepVGG介绍称,通过融合而成的3x3卷积结构,对计算密集型的硬件设备很友好。
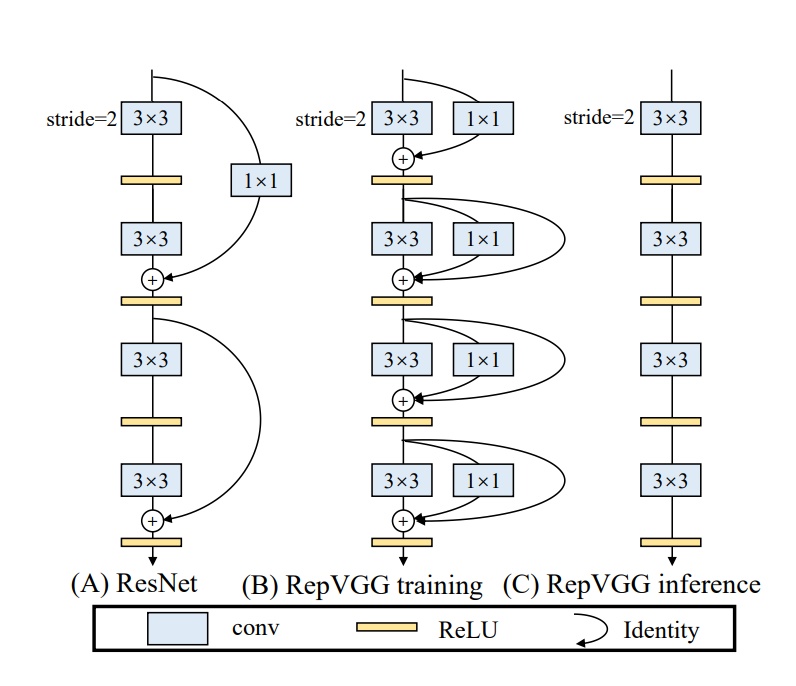
RegVGG是一种简单又强力的CNN结构,在训练时使用了性能高的多分支模型,而在推理时使用了速度快、省内存的单路模型,也是更具备速度和精度的均衡。
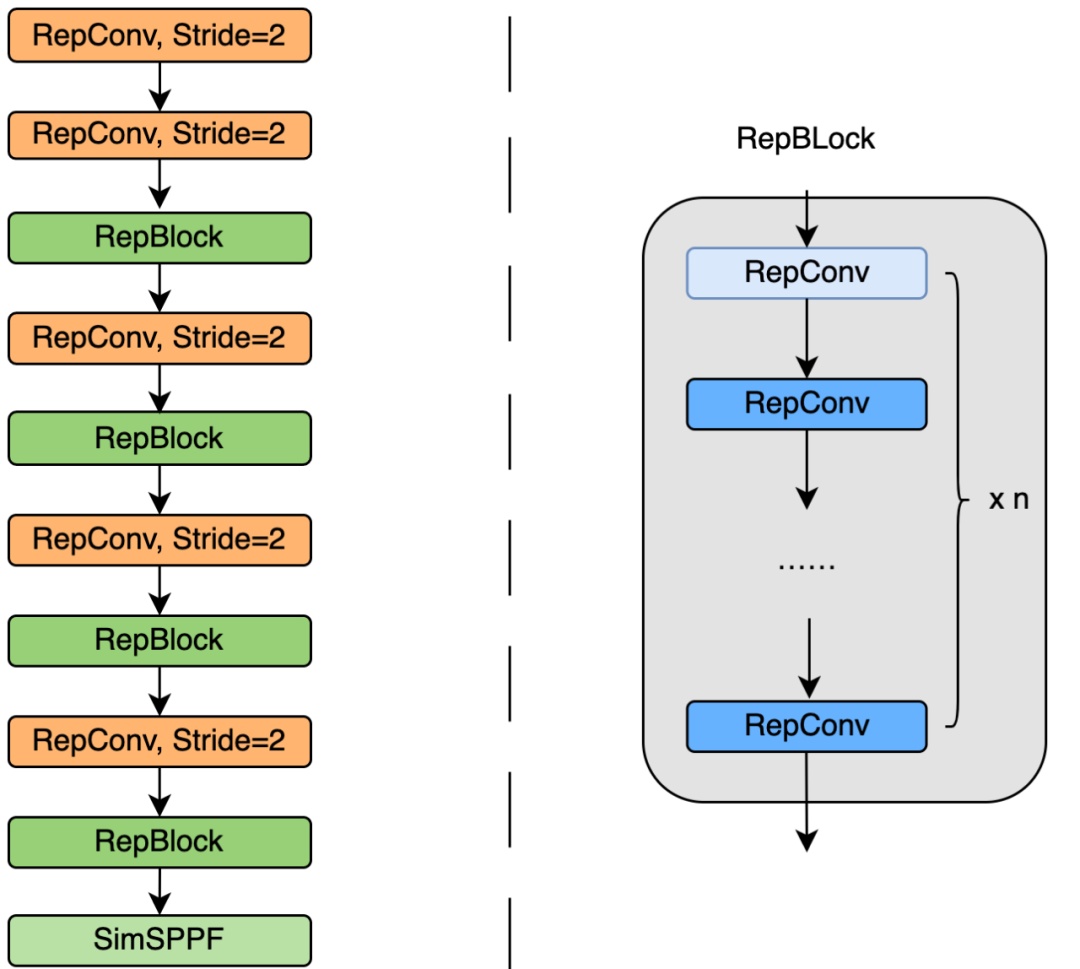
EfficientRep将在backbone中stride=2的卷积层换成了stride=2的RepConv层。并且也将CSP-Block修改为了RepBlock。
Neck
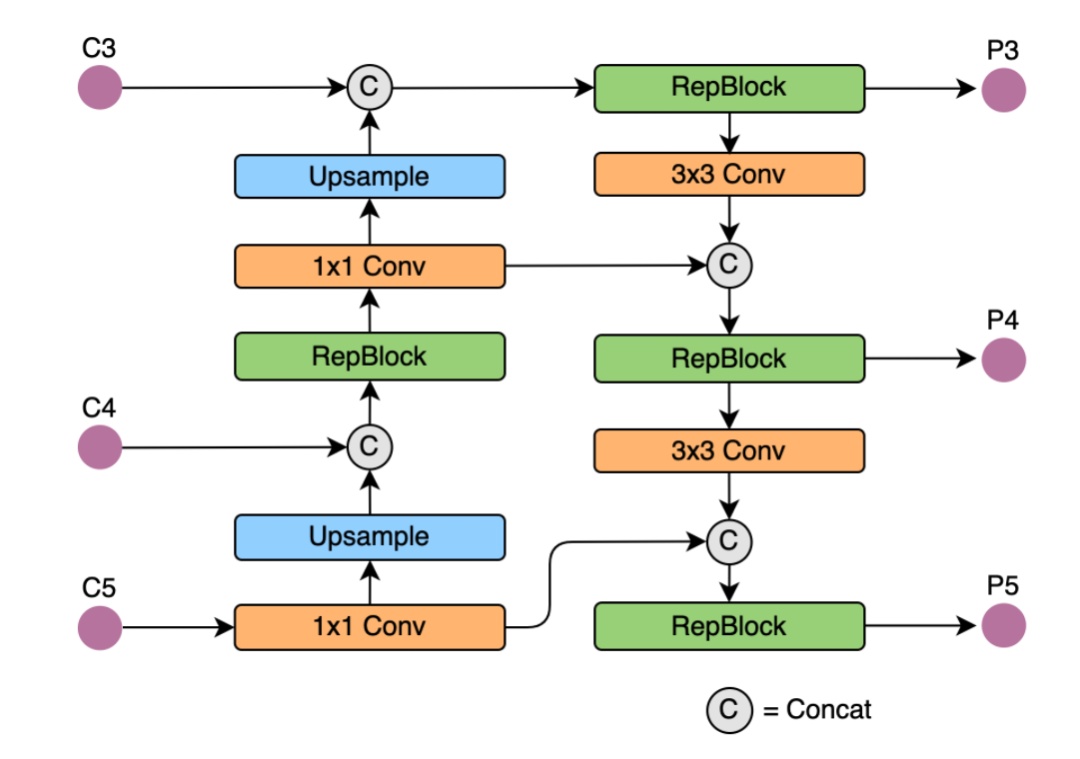
同样为了降低在硬件上的延时,在Neck上的特征融合结构中也引入了Rep结构。在Neck中使用的是Rep-PAN。
Rep-PAN是基于PAN和RepBlock两者的结合。主要就是替换PAN中的CSP-Block为RepBlock。
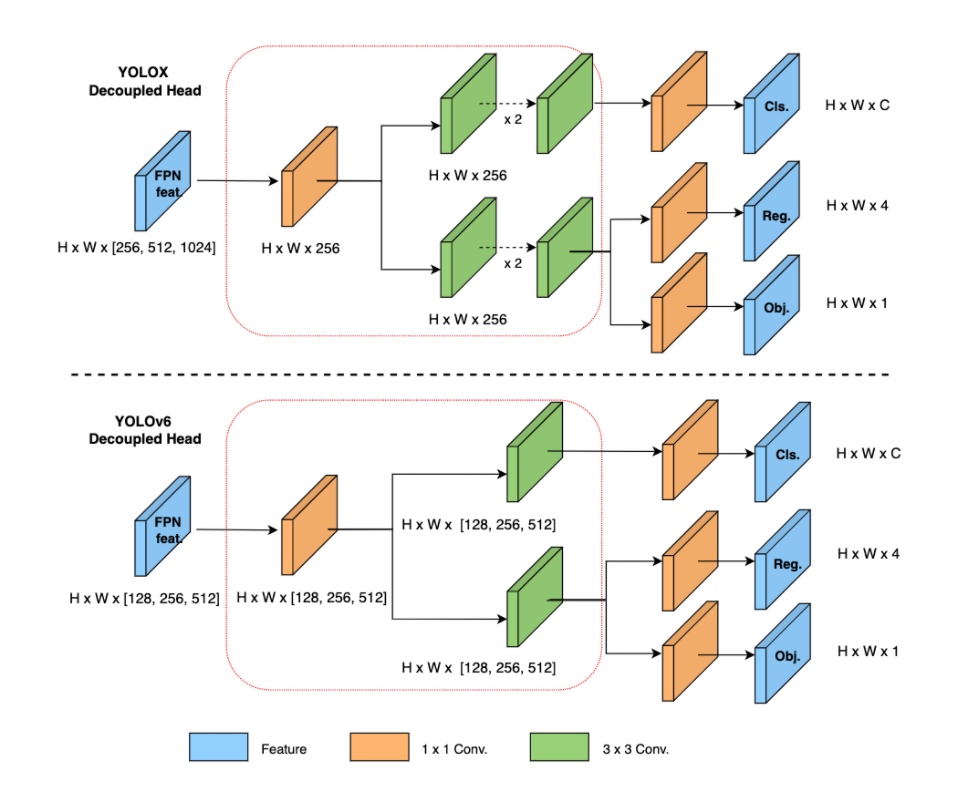
Head
和YOLOX一样,YOLOv6也对检测头进行了解耦,分开了边框回归与类别分类的过程。将边框回归和类别分类耦合在一起时会影响性能,因为这样不仅加慢收敛的速度,也会提高检测头的复杂程度。
因为在YOLOX的解耦头中,新增了两个额外的3x3卷积,这样也会一定程度增加运算的复杂度。YOLOv6基于Hybrid Channels的策略重新设计出了一个更高效的解耦头结构。在不怎么改变精度的情况下降低延时,这样也达到了速度与精度的权衡。
Anchor-free
传统的目标检测都是基于anchor的,如今,anchor-free的使用越来越广。因为使用anchor会存在以下几个问题:
1.需要在训练之前进行聚类分析以确定最佳anchor集合,但是这些anchor集合存在数据相关性,泛化性能较差。
2. anchor机制提升了检测头的复杂度。
SimOTA
SimOTA主要用于正样本的匹配,即为不同目标设定不同的正样本数量。我们知道检测模型推理的过程中会出现正负样本不均衡的现象,所以就需要进行正负样本的平均。
传统的anchor-free版本仅仅对每个目标赋予一个正样本,而忽视了其他高质量预测。因此这里为每个中心点赋予了多个正样本。并且为每个GT分配不同数量的anchor。所用的策略是参考FCOS,赋予中心3×3区域为正样本。落入其中区域的都为正样本。
SimOTA实际就是为各个GT框进行anchor的分配。分配策略可以理解为,根据不同anchor的模糊程度赋予不同的权重,从而得到分配的数量。因为在OTA中,将模糊的anchor分配给任何GT或背景都会对其他GT的梯度造成不利影响。所以,对模糊anchor样本的分配策略是特殊的。为此,需要进行更优的分配策略:除了考虑分类信息,还考虑了位置信息。也就是为图像中的所有GT对象找到全局的高置信度进行分配。
但是这里又引入了一个问题:最优运输问题优化会带来25%的额外训练耗时。所以在YOLOX中,又简化为动态的top-k策略进行分配,也就是得到一个近似解的策略:SimOTA。YOLOv6也沿用这个标签分配的方法。
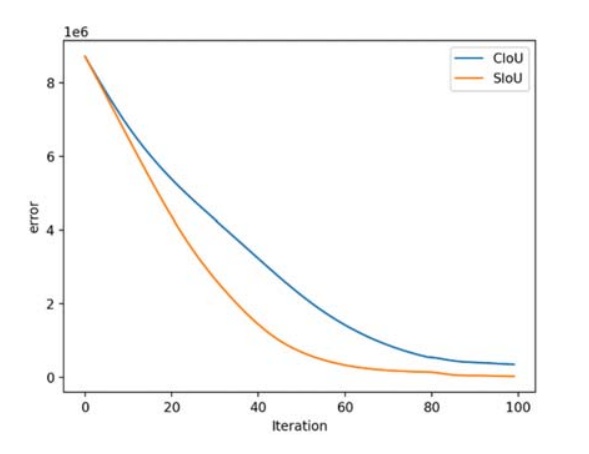
SIOU
SIOU是2022年5月提出的。常用的IOU损失有IOU、GIOU、DIOU等,它们引入了框与框之间的重叠程度、中心点距离等等因素来进行匹配。而SIOU 损失函数是引入了所需回归之间的向量角度。这样就重新定义了距离损失,有效降低了回归的自由度,从而加速网络的收敛,进一步提升回归的准确性。
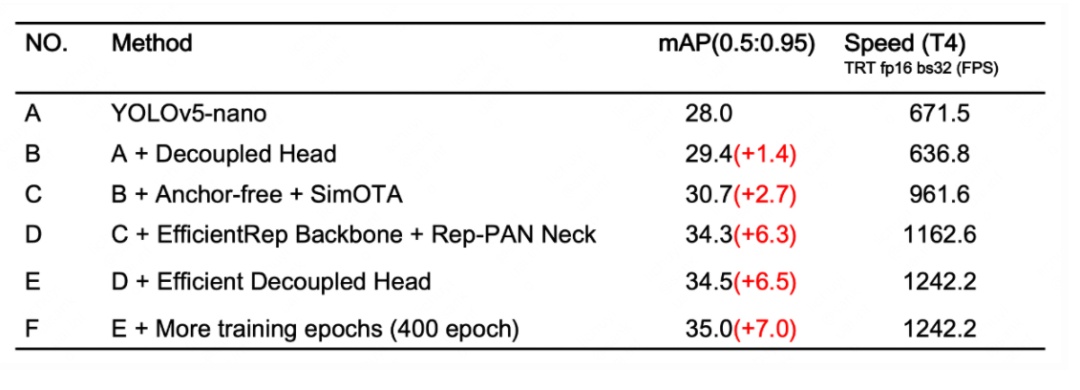
实验结果
以下是多种修改后的消融实验结果,可以看到,经过不断的改进,模型的mAP和FPS都获得了明显的增益。
以下是YOLOv6和目前比较主流的YOLO系列算法比较的结果,包括速度、参数量等指标:
使用细节
从github上的readme来看,训练的方式也比较常规,总体来说,和YOLOv5、YOLOX的挺类似,使用的还是大家比较熟悉的方式。
训练前的准备
首先需要根据requirements.txt安装,里面也没有什么太特别的库。就是torch、torchvision、opencv-python、onnx这一些常规库。
然后就需要准备数据集了。依旧是每张图片对应一个标签,每一行代表一个物体。标签的格式如下:
# class_id center_x center_y bbox_width bbox_height
0 0.300926 0.617063 0.601852 0.765873
1 0.575 0.319531 0.4 0.55156
注意类别数目需要从0开始,并且宽、中心点需要进行归一化,也就是除以图片的宽高。
接下里就可以组织你的训练集和评估集,它们的文件夹组成如下:
# image directory
path/to/data/images/train/im0.jpg
path/to/data/images/val/im1.jpg
path/to/data/images/test/im2.jpg
# label directory
path/to/data/labels/train/im0.txt
path/to/data/labels/val/im1.txt
path/to/data/labels/test/im2.txt这里也有YAML文件和config文件,可以高效地进行配置。这样一来,你就只需要在这些文件里修改就行了,而不需要改动代码,也不需要在整个项目中,东挑一个文件进行改动,西选一个文件进行修改。
# 这是dataset.yaml
train: path/to/data/images/train # train images
val: path/to/data/images/val # val images
test: path/to/data/images/test # test images (optional)
# Classes
nc: 20 # number of classes
names: ['aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable', 'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor'] # class name
## 这是模型配置文件
model = dict(
type='YOLOv6s',
pretrained='./weights/yolov6s.pt', # download pretrain model from YOLOv6 github if use pretrained model
depth_multiple = 0.33,
width_multiple = 0.50,
...
)
solver=dict(
optim='SGD',
lr_scheduler='Cosine',
...
)
data_aug = dict(
hsv_h=0.015,
hsv_s=0.7,
hsv_v=0.4,
...
)
训练
这是训练的命令:
python tools/train.py --batch 256 --conf configs/yolov6s.py --data data/coco.yaml --device 0 configs/yolov6n.py
以上是单卡训练的命令,如果你想使用多卡训练,可以用以下的命令:
python tools/train.py --batch 256 --conf configs/yolov6s.py --data data/coco.yaml --device 0 configs/yolov6n.pypython -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 256 --conf configs/yolov6s.py --data data/coco.yaml --device 0,1,2,3,4,5,6,7 configs/yolov6n.pypython -m torch.distributed.launch --nproc_per_node 8 tools/train.py --batch 256 --conf configs/yolov6s.py --data data/coco.yaml --device 0,1,2,3,4,5,6,7 configs/yolov6n.py
评估
训练完后,用于评估的命令:
python tools/eval.py --data data/coco.yaml --batch 32 --weights yolov6s.pt --task val yolov6n.pt
测试
进行测试推理,可以使用以下命令:
python tools/infer.py --weights yolov6s.pt --source [img.jpg / imgdir] yolov6n.pt如果你需要进行部署,就需要进行export转换,以转为onnx为例:
python deploy/ONNX/export_onnx.py --weights output_dir/name/weights/best_ckpt.pt --device 0
文末
以上,就是对于YOLOv6的初步品尝。可以看到,YOLOv6使用了不同的改良策略后,性能的提升都是立竿见影的。从在COCO数据集上的实验结果来看,YOLOv6 在目标检测算法中可谓是一马当先了。
并且如今的开源项目,对于工业上的部署也越来越支持了,完全考虑到了如今工程师们的刚需。虽然提升性能这一项"做好"工作很重要,但是工业部署上的“做到”更加重要。这也是我们在工作中需要考虑的一点:有时完成比完美更加重要,做好的前提是做到。只有先做到,才有后面的做好。
参考链接
https://arxiv.org/pdf/2101.03697.pdf
https://arxiv.org/pdf/2107.08430.pdf
https://arxiv.org/ftp/arxiv/papers/2205/2205.12740.pdf
https://arxiv.org/ftp/arxiv/papers/2205/2205.12740.pdf
https://tech.meituan.com/2022/06/23/yolov6-a-fast-and-accurate-target-detection-framework-is-opening-source.html
https://github.com/meituan/YOLOv6CV技术指南创建了一个计算机视觉技术交流群和免费版的知识星球,目前星球内人数已经700+,主题数量达到200+。
知识星球内将会每天发布一些作业,用于引导大家去学一些东西,大家可根据作业来持续打卡学习。
CV技术群内每天都会发最近几天出来的顶会论文,大家可以选择感兴趣的论文去阅读,持续follow最新技术,若是看完后写个解读给我们投稿,还可以收到稿费。 另外,技术群内和本人朋友圈内也将发布各个期刊、会议的征稿通知,若有需要的请扫描加好友,并及时关注。
加群加星球方式:关注公众号CV技术指南,获取编辑微信,邀请加入。
公众号其它文章
CVPR2022 | iFS-RCNN:一种增量小样本实例分割器
CVPR2022 | A ConvNet for the 2020s & 如何设计神经网络总结
CVPR2022 | PanopticDepth:深度感知全景分割的统一框架
CVPR2022 | 未知目标检测模块STUD:学习视频中的未知目标
从零搭建Pytorch模型教程(五)编写训练过程--一些基本的配置
从零搭建Pytorch模型教程(四)编写训练过程--参数解析
从零搭建Pytorch模型教程(三)搭建Transformer网络
以上是关于YOLO系列梳理初尝新鲜出炉的YOLOv6的主要内容,如果未能解决你的问题,请参考以下文章