设计数据密集型应用的主要关注点
Posted 松松哥、
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了设计数据密集型应用的主要关注点相关的知识,希望对你有一定的参考价值。
设计数据密集型应用的主要关注点
设计数据密集型系统应该主要关注哪些地方?
思维导图
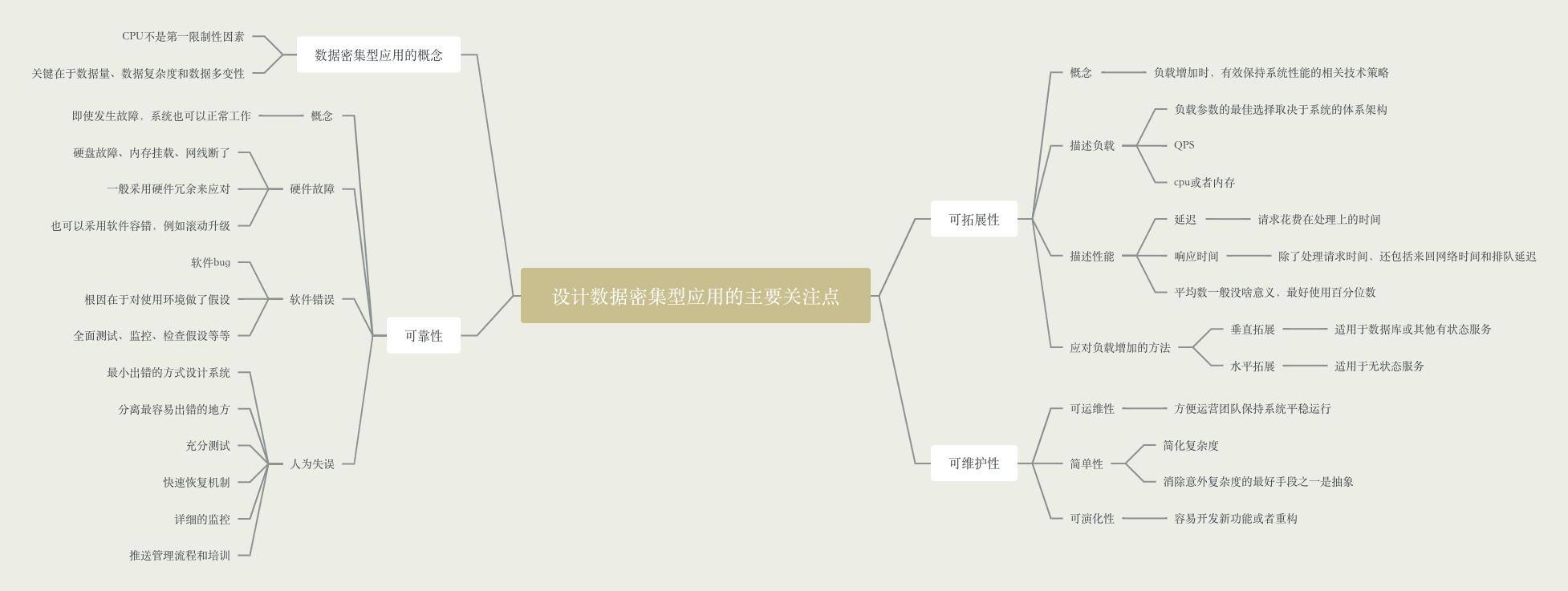
数据密集型应用的概念
对于数据密集型应用,CPU的处理能力往往不是第一限制性因素,关键在于数据量、数据的复杂度以及数据的多边形。与之相对于的是计算密集型,CPU就是其限制因素,例如人工智能。
数据密集型系统主要关注的三个问题:
- 可靠性
- 可拓展性
- 可维护性
可靠性
概念
当系统发送故障时,还能正常工作,还能继续为用户提供服务。例如APP首页挂了,但是用户还能正常刷视频,其实系统底下已经异常了,返回的只是缓存数据。
一般针对较大概率可能发送的、损失比较大异常场景进行故障。例如底下数据库异常、网络抖动。当发生这些异常情况时,可以进行降级等一系列操作,来避免系统彻底GG。大公司一般会有定期的故障演习来测试一下,例如把某台容器关掉,要是这台容器只有一台,关掉系统就算彻底失效了。
硬件故障
一般是指硬盘故障、内存挂载、网线被拔了等等。关键的应用都会做冗余,例如基本的多机部署,多地部署等等。也可以使用其他软件手段,例如滚动升级。
软件错误
一般就是系统bug。这类错误平时很难发现,根本原因在于你对系统的环境做了假设,例如下标一般不会小于0啊,除灵错误啊。这些假设也很难自己意识到。当发生panic了,才会发现:哦,除数竟然还能是0
针对这类错误,一般采用的方式就是各种各样的测试和快速恢复手段。例如单元测试、接口测试、全链路测试、快速回滚等等。
人为失误
人为失误的比例是相对高的,我见过很多配置文件写错了导致系统故障的。例如配置写错了、测试代码忘记删了等。
针对此类情况,只能依靠全自动的测试和监控。全自动的测试保障修改前后对外功能是一致的,监控则可以帮你迅速发现问题。
可拓展性
可拓展性是用来描述系统应对负载增加能力的术语,主要考虑以下问题:
- 如果系统以某种方式增长,怎么应对
- 如何添加计算资源来处理额外的负载
描述负载
一般是指监控系统运行情况的参数。例如QPS、TPS、CPU使用率、缓存命中率等等。
描述性能
一般主要关注吞吐量、响应时间、延迟等数据。在观察响应时间这里,一般经常采用百分位数来描述,例如p99就是百分之99的用户的响应时间。采用较高的响应时间百分位数很重要,因为它们直接影响用户的总体服务体验。
应对负载增加的方法
垂直拓展
主要使用于数据库等有状态的服务,可以直接换个高级点的机器。因为这类服务不好做分布式,这会涉及到数据分区和数据复制,里面说起来复杂度又会上升一个量级。
水平拓展
就是加机器,做分布式。适用于无状态的服务,机器A和机器B来处理效果都一样。
初创公司或尚未定型的产品还是尽量迭代比较好,过分关注于拓展需要针对系统做假设,例如哪些操作是最频繁的,数据增长最快的。一旦做了假设,后面产品发展与预期不符合,就会白白浪费人力和资源。
可维护性
你接手过屎山吗?

可运维性
是指系统运维人员运营起来是否轻松。是否在代码里面绑定了机器,是否必须要做一些神秘操作才能让服务运行等等。我还见过线上的运行的代码竟然不是master分支的代码,接手的同学发布master包到线上直接GG了。
一句话,别做反人类的事。
简单性
简化系统复杂度。能抽象的就抽象,方便外部理解。
可演化性
易于改变。是指开发新需求很容易。一般来说简单容易懂的系统改起来就越简单。当然,也要注意复用,例如没有做抽象接口的系统,每次加功能都是复制其他接口的代码然后改一下,简单是简单了,但是很难看,总有一天当你遇到“所有接口都需要改变”的需求时,复制出来的代码就是灾难。毕竟,“重复代码”是《重构》里面代码坏味道之首。
数据密集型应用存储与检索设计
本文内容来自《数据密集型应用系统设计》(大名鼎鼎的 DDIA)。
高分好书
什么是「数据密集型应用系统」?
当数据(数据量、数据复杂度、数据变化速度)是一个应用的主要挑战,那么可以把这个应用称为数据密集型的。与之相对的是计算密集型——处理器速度是主要瓶颈。
其实我们平时遇到的大部分系统都是数据密集型的——应用代码访问内存、硬盘、数据库、消息队列中的数据,经过业务逻辑处理,再返回给用户。
查询类型
Online analytical processing和Online analytical processing。
查询类型主要分为两大类:
|
引擎类型 |
请求数量 |
数据量 |
瓶颈 |
存储格式 |
用户 |
场景举例 |
产品举例 |
|
OLTP |
相对频繁,侧重在线交易 |
总体和单次查询都相对较小 |
Disk Seek |
多用行存 |
比较普遍,一般应用用的比较多 |
银行交易 |
MySQL |
|
OLAP |
相对较少,侧重离线分析 |
总体和单次查询都相对巨大 |
Disk Bandwidth |
列存逐渐流行 |
多为商业用户 |
商业分析 |
ClickHouse |
其中,OLTP 侧,常用的存储引擎又有两种流派:
|
流派 |
主要特点 |
基本思想 |
代表 |
|
log-structured 流 |
只允许追加,所有修改都表现为文件的追加和文件整体增删 |
变随机写为顺序写 |
Bitcask、LevelDB、RocksDB、Cassandra、Lucene |
|
update-in-place 流 |
以页(page)为粒度对磁盘数据进行修改 |
面向页、查找树 |
B 族树,所有主流关系型数据库和一些非关系型数据库 |
此外,针对 OLTP, 还探索了常见的建索引的方法,以及一种特殊的数据库 —— 全内存数据库。
对于数据仓库,本章分析了它与 OLTP 的主要不同之处。数据仓库主要侧重于聚合查询,需要扫描很大量的数据,此时,索引就相对不太有用。需要考虑的是存储成本、带宽优化等,由此引出列式存储。
驱动数据库的底层数据结构
本节由一个 shell 脚本出发,到一个相当简单但可用的存储引擎 Bitcask,然后引出 LSM-tree,他们都属于日志流范畴。之后转向存储引擎另一流派 ——B 族树,之后对其做了简单对比。最后探讨了存储中离不开的结构 —— 索引。
首先来看,世界上 “最简单” 的数据库,由两个 Bash 函数构成:
|
1 2 3 4 5 6 7 8 |
#!/bin/bash db_set () echo "$1,$2" >> database
db_get () grep "^$1," database | sed -e "s/^$1,//" | tail -n 1
|
这两个函数实现了一个基于字符串的 KV 存储(只支持 get/set,不支持 delete):
|
1 2 3 4 |
$ db_set 123456 \'"name":"London","attractions":["Big Ben","London Eye"]\' $ db_set 42 \'"name":"San Francisco","attractions":["Golden Gate Bridge"]\' $ db_get 42 "name":"San Francisco","attractions":["Golden Gate Bridge"] |
来分析下它为什么 work,也反映了日志结构存储的最基本原理:
- set:在文件末尾追加一个 KV 对。
- get:匹配所有 Key,返回最后(也即最新)一条 KV 对中的 Value。
可以看出:写很快,但是读需要全文逐行扫描,会慢很多。典型的以读换写。为了加快读,我们需要构建索引:一种允许基于某些字段查找的额外数据结构。
索引从原数据中构建,只为加快查找。因此索引会耗费一定额外空间,和插入时间(每次插入要更新索引),即,重新以空间和写换读取。
这便是数据库存储引擎设计和选择时最常见的权衡(trade off):
- 恰当的存储格式能加快写(日志结构),但是会让读取很慢;也可以加快读(查找树、B 族树),但会让写入较慢。
- 为了弥补读性能,可以构建索引。但是会牺牲写入性能和耗费额外空间。
存储格式一般不好动,但是索引构建与否,一般交予用户选择。
哈希索引
本节主要基于最基础的 KV 索引。
依上小节的例子,所有数据顺序追加到磁盘上。为了加快查询,我们在内存中构建一个哈希索引:
- Key 是查询 Key
- Value 是 KV 条目的起始位置和
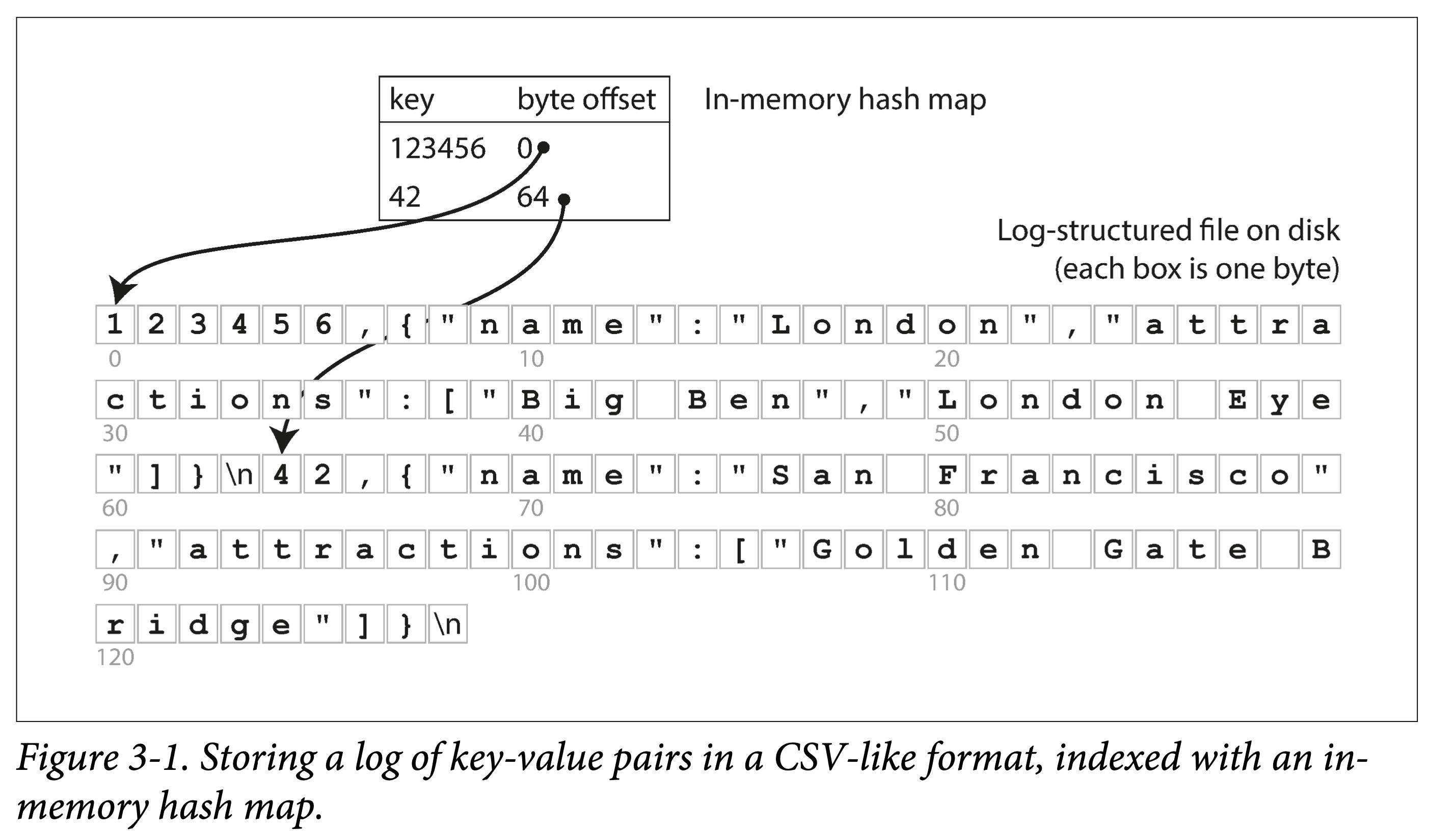
看来很简单,但这正是 Bitcask 的基本设计,但关键是,他 Work(在小数据量时,即所有 key 都能存到内存中时):能提供很高的读写性能:
- 写:文件追加写。
- 读:一次内存查询,一次磁盘 seek;如果数据已经被缓存,则 seek 也可以省掉。
如果你的 key 集合很小(意味着能全放内存),但是每个 key 更新很频繁,那么 Bitcask 便是你的菜。举个栗子:频繁更新的视频播放量,key 是视频 url,value 是视频播放量。
但有个很重要问题,单个文件越来越大,磁盘空间不够怎么办?
在文件到达一定尺寸后,就新建一个文件,将原文件变为只读。同时为了回收多个 key 多次写入的造成的空间浪费,可以将只读文件进行紧缩( compact ),将旧文件进行重写,挤出 “水分”(被覆写的数据)以进行垃圾回收。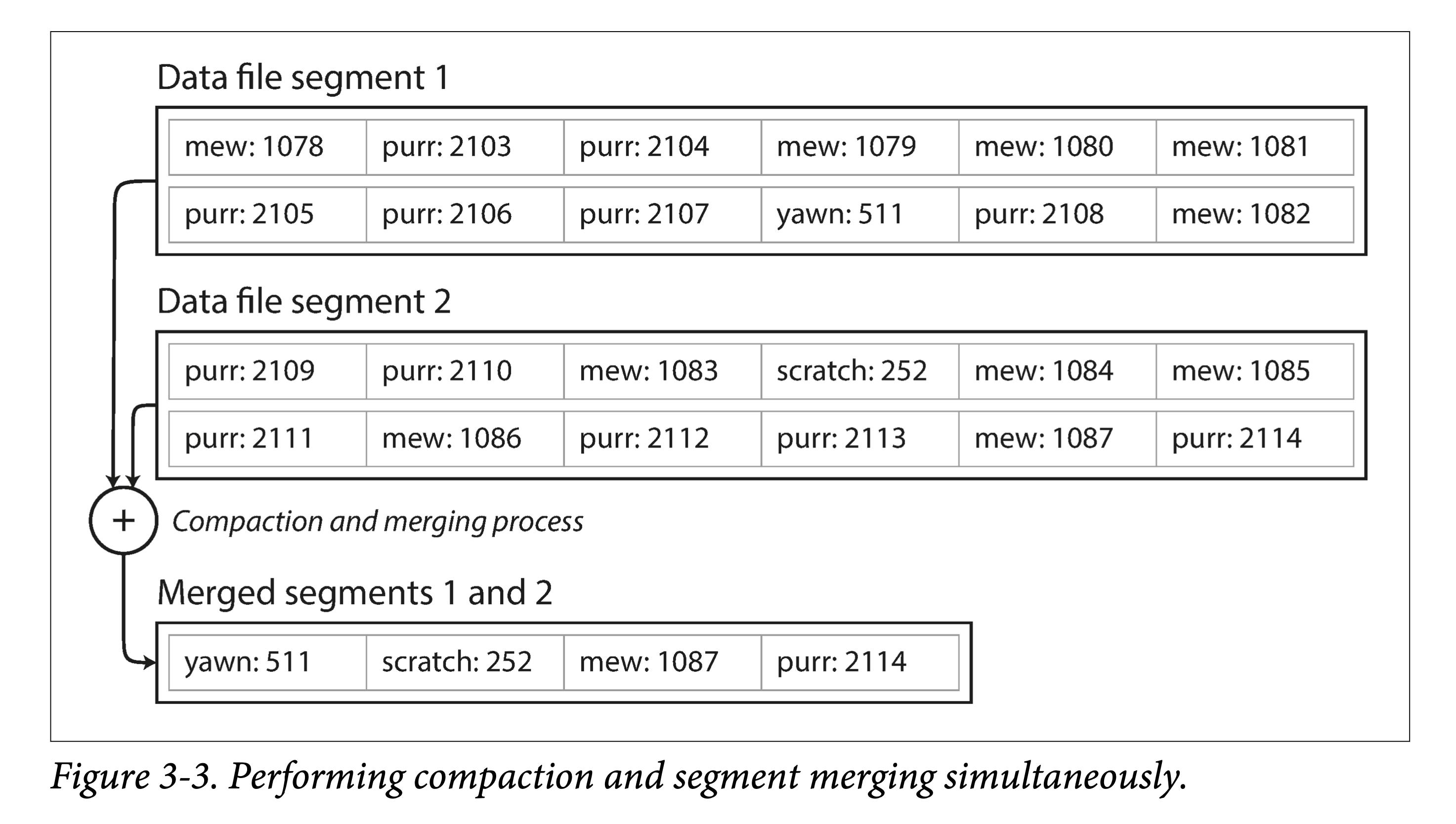
当然,如果我们想让其工业可用,还有很多问题需要解决:
- 文件格式。对于日志来说,CSV 不是一种紧凑的数据格式,有很多空间浪费。比如,可以用 length + record bytes 。
- 记录删除。之前只支持 put\\get,但实际还需要支持 delete。但日志结构又不支持更新,怎么办呢?一般是写一个特殊标记(比如墓碑记录,tombstone)以表示该记录已删除。之后 compact 时真正删除即可。
- 宕机恢复。在机器重启时,内存中的哈希索引将会丢失。当然,可以全盘扫描以重建,但通常一个小优化是,对于每个 segment file, 将其索引条目和数据文件一块持久化,重启时只需加载索引条目即可。
- 记录写坏、少写。系统任何时候都有可能宕机,由此会造成记录写坏、少写。为了识别错误记录,我们需要增加一些校验字段,以识别并跳过这种数据。为了跳过写了部分的数据,还要用一些特殊字符来标识记录间的边界。
- 并发控制。由于只有一个活动(追加)文件,因此写只有一个天然并发度。但其他的文件都是不可变的(compact 时会读取然后生成新的),因此读取和紧缩可以并发执行。
乍一看,基于日志的存储结构存在折不少浪费:需要以追加进行更新和删除。但日志结构有几个原地更新结构无法做的优点:
- 以顺序写代替随机写。对于磁盘和 SSD,顺序写都要比随机写快几个数量级。
- 简易的并发控制。由于大部分的文件都是不可变(immutable)的,因此更容易做并发读取和紧缩。也不用担心原地更新会造成新老数据交替。
- 更少的内部碎片。每次紧缩会将垃圾完全挤出。但是原地更新就会在 page 中留下一些不可用空间。
当然,基于内存的哈希索引也有其局限:
- 所有 Key 必须放内存。一旦 Key 的数据量超过内存大小,这种方案便不再 work。当然你可以设计基于磁盘的哈希表,但那又会带来大量的随机写。
- 不支持范围查询。由于 key 是无序的,要进行范围查询必须全表扫描。
后面讲的 LSM-Tree 和 B+ 树,都能部分规避上述问题。
- 想想,会如何进行规避?
SSTables 和 LSM-Trees
这一节层层递进,步步做引,从 SSTables 格式出发,牵出 LSM-Trees 全貌。
对于 KV 数据,前面的 BitCask 存储结构是:
- 外存上日志片段
- 内存中的哈希表
其中外存上的数据是简单追加写而形成的,并没有按照某个字段有序。
假设加一个限制,让这些文件按 key 有序。我们称这种格式为:SSTable(Sorted String Table)。
这种文件格式有什么优点呢?
高效的数据文件合并。即有序文件的归并外排,顺序读,顺序写。不同文件出现相同 Key 怎么办?
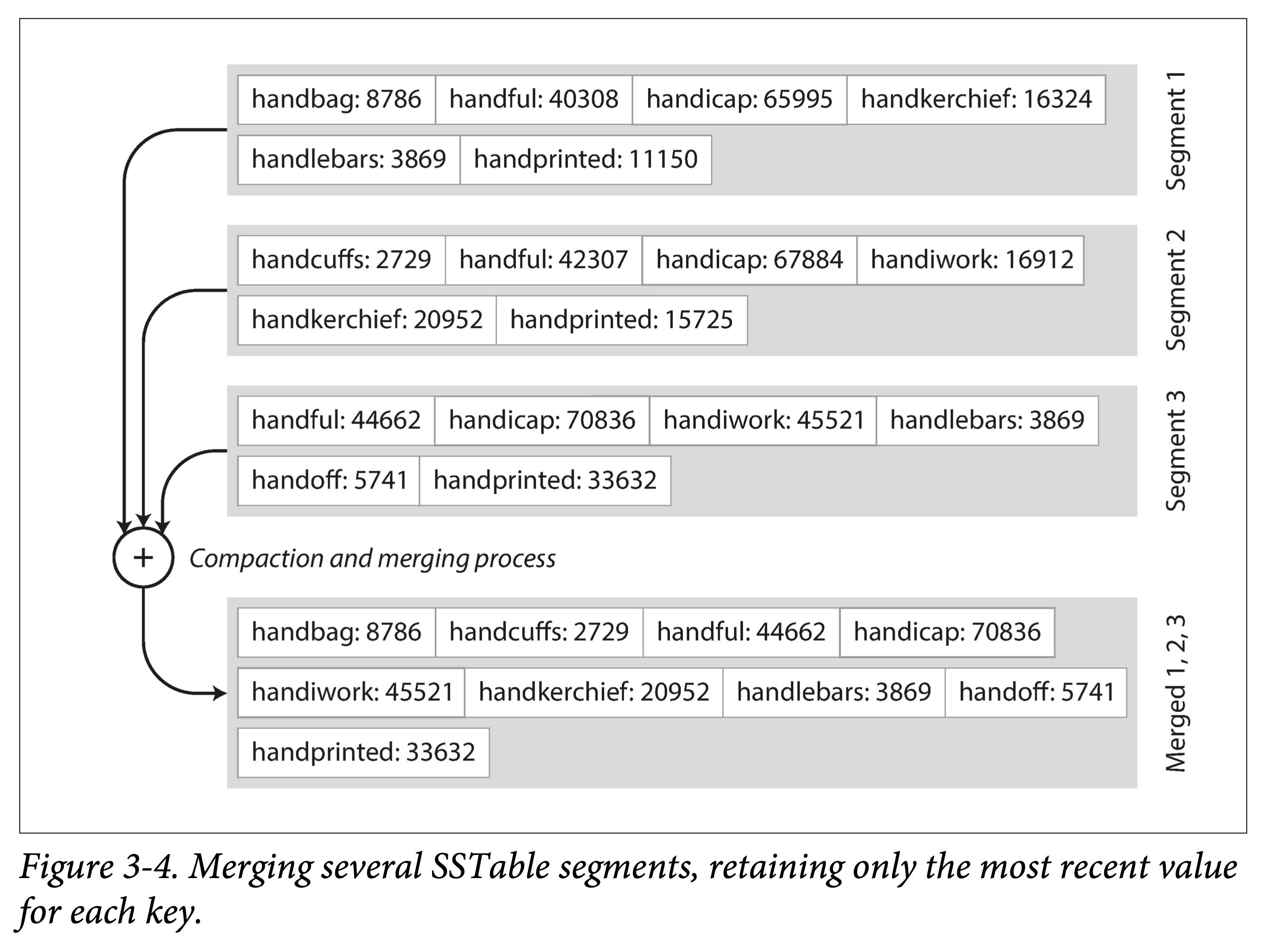
不需要在内存中保存所有数据的索引。仅需要记录下每个文件界限(以区间表示:[startKey, endKey],当然实际会记录的更细)即可。查找某个 Key 时,去所有包含该 Key 的区间对应的文件二分查找即可。
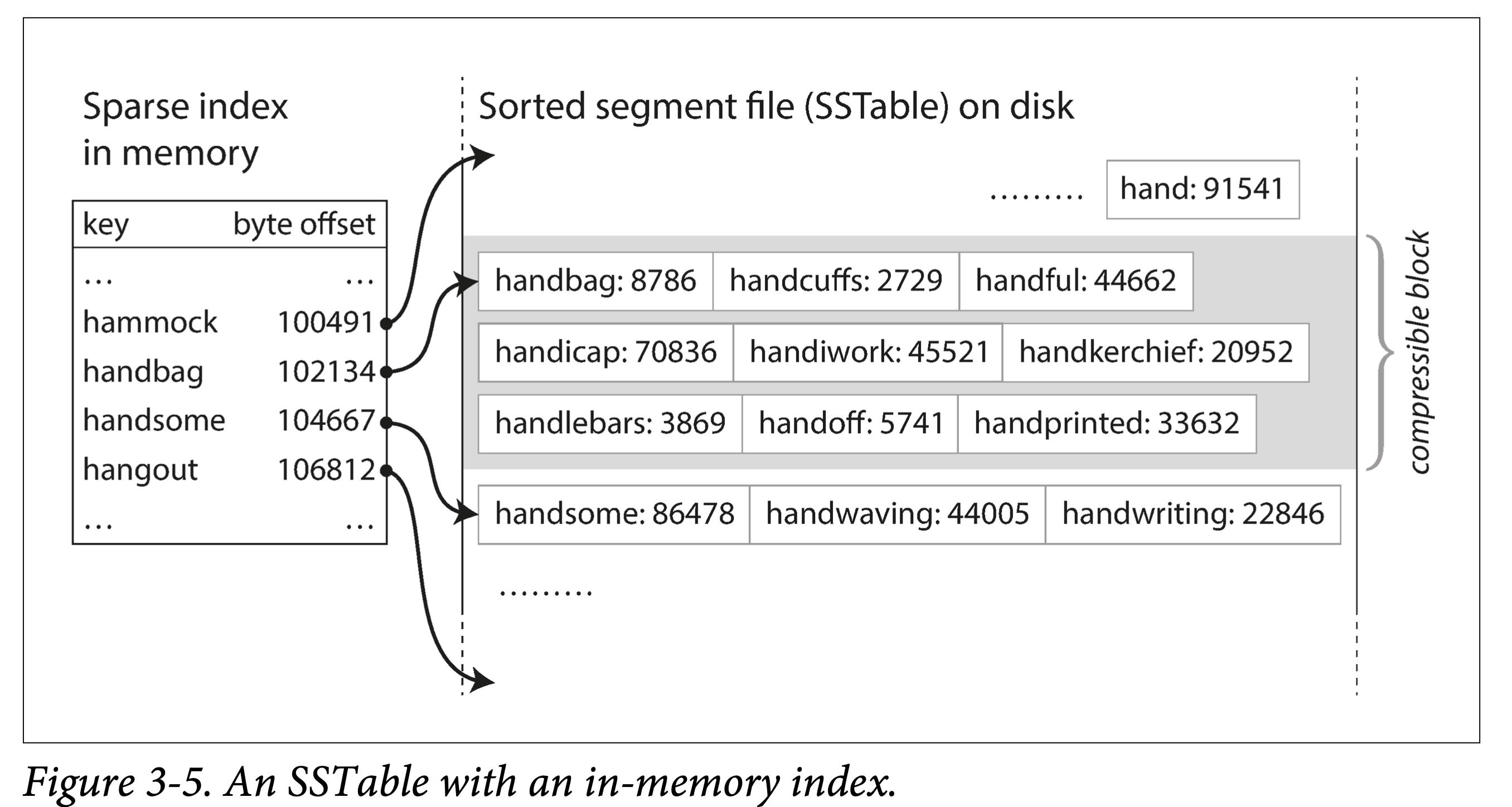
分块压缩,节省空间,减少 IO。相邻 Key 共享前缀,既然每次都要批量取,那正好一组 key batch 到一块,称为 block,且只记录 block 的索引。
构建和维护 SSTables
SSTables 格式听起来很美好,但须知数据是乱序的来的,我们如何得到有序的数据文件呢?
这可以拆解为两个小问题:
- 如何构建。
- 如何维护。
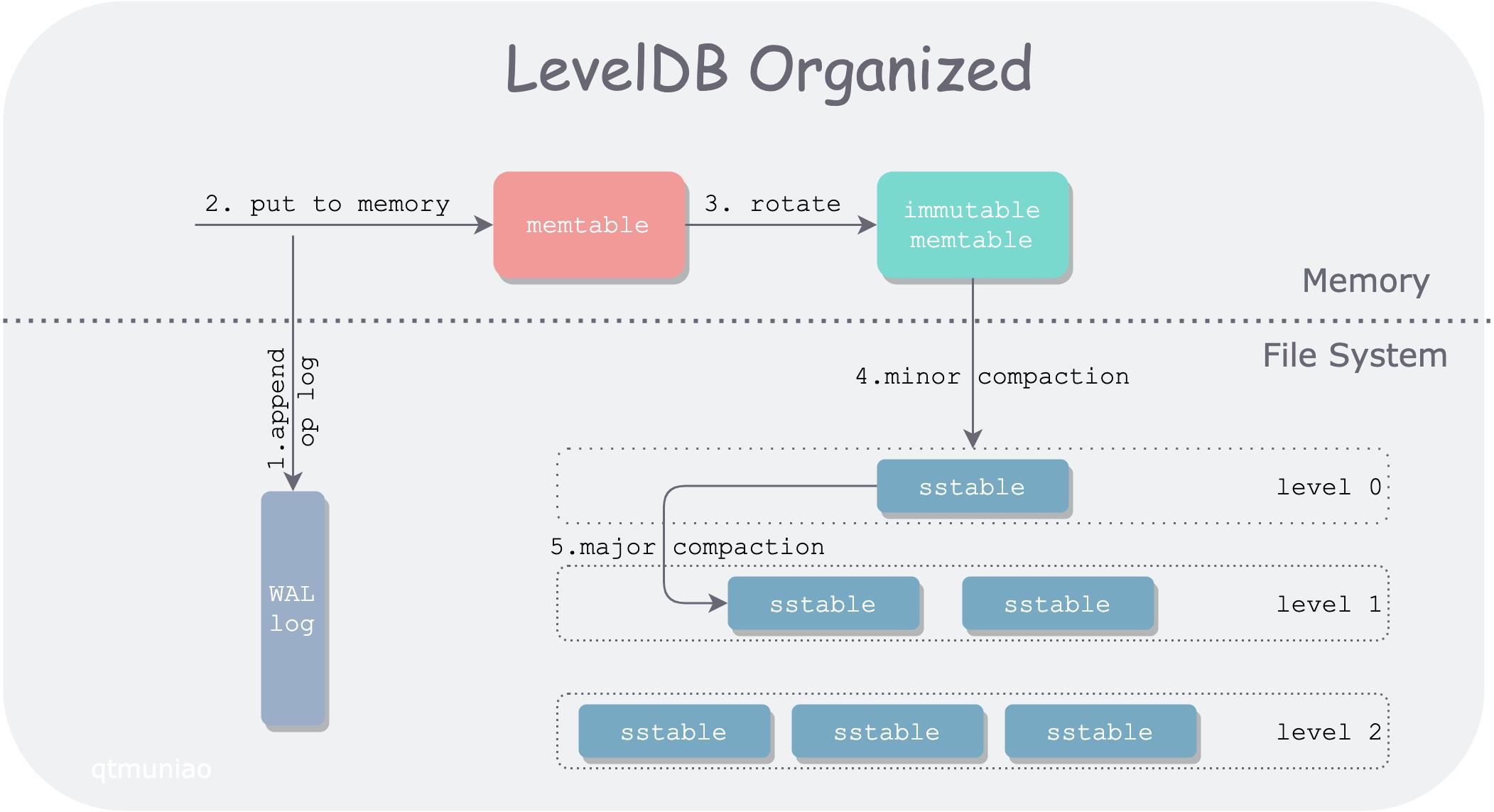
构建 SSTable 文件。将乱序数据在外存(磁盘 or SSD)中上整理为有序文件,是比较难的。但是在内存就方便的多。于是一个大胆的想法就形成了:
- 在内存中维护一个有序结构(称为 MemTable)。红黑树、AVL 树、条表。
- 到达一定阈值之后全量 dump 到外存。
维护 SSTable 文件。为什么需要维护呢?首先要问,对于上述复合结构,我们怎么进行查询:
- 先去 MemTable 中查找,如果命中则返回。
- 再去 SSTable 按时间顺序由新到旧逐一查找。
如果 SSTable 文件越来越多,则查找代价会越来越大。因此需要将多个 SSTable 文件合并,以减少文件数量,同时进行 GC,我们称之为紧缩( Compaction)。
该方案的问题:如果出现宕机,内存中的数据结构将会消失。 解决方法也很经典:WAL。
从 SSTables 到 LSM-Tree
将前面几节的一些碎片有机的组织起来,便是时下流行的存储引擎 LevelDB 和 RocksDB 后面的存储结构:LSM-Tree:
这种数据结构是 Patrick O’Neil 等人,在 1996 年提出的:The Log-Structured Merge-Tree。
Elasticsearch 和 Solr 的索引引擎 Lucene,也使用类似 LSM-Tree 存储结构。但其数据模型不是 KV,但类似:word → document list。
性能优化
如果想让一个引擎工程上可用,还会做大量的性能优化。对于 LSM-Tree 来说,包括:
优化 SSTable 的查找。常用 Bloom Filter。该数据结构可以使用较少的内存为每个 SSTable 做一些指纹,起到一些初筛的作用。
层级化组织 SSTable。以控制 Compaction 的顺序和时间。常见的有 size-tiered 和 leveled compaction。LevelDB 便是支持后者而得名。前者比较简单粗暴,后者性能更好,也因此更为常见。

对于 RocksDB 来说,工程上的优化和使用上的优化就更多了。在其 Wiki 上随便摘录几点:
- Column Family
- 前缀压缩和过滤
- 键值分离,BlobDB
但无论有多少变种和优化,LSM-Tree 的核心思想 —— 保存一组合理组织、后台合并的 SSTables —— 简约而强大。可以方便的进行范围遍历,可以变大量随机为少量顺序。
B 族树
虽然先讲的 LSM-Tree,但是它要比 B+ 树新的多。
B 树于 1970 年被 R. Bayer and E. McCreight 提出后,便迅速流行了起来。现在几乎所有的关系型数据中,它都是数据索引标准一般的实现。
与 LSM-Tree 一样,它也支持高效的点查和范围查。但却使用了完全不同的组织方式。
其特点有:
- 以页(在磁盘上叫 page,在内存中叫 block,通常为 4k)为单位进行组织。
- 页之间以页 ID 来进行逻辑引用,从而组织成一颗磁盘上的树。
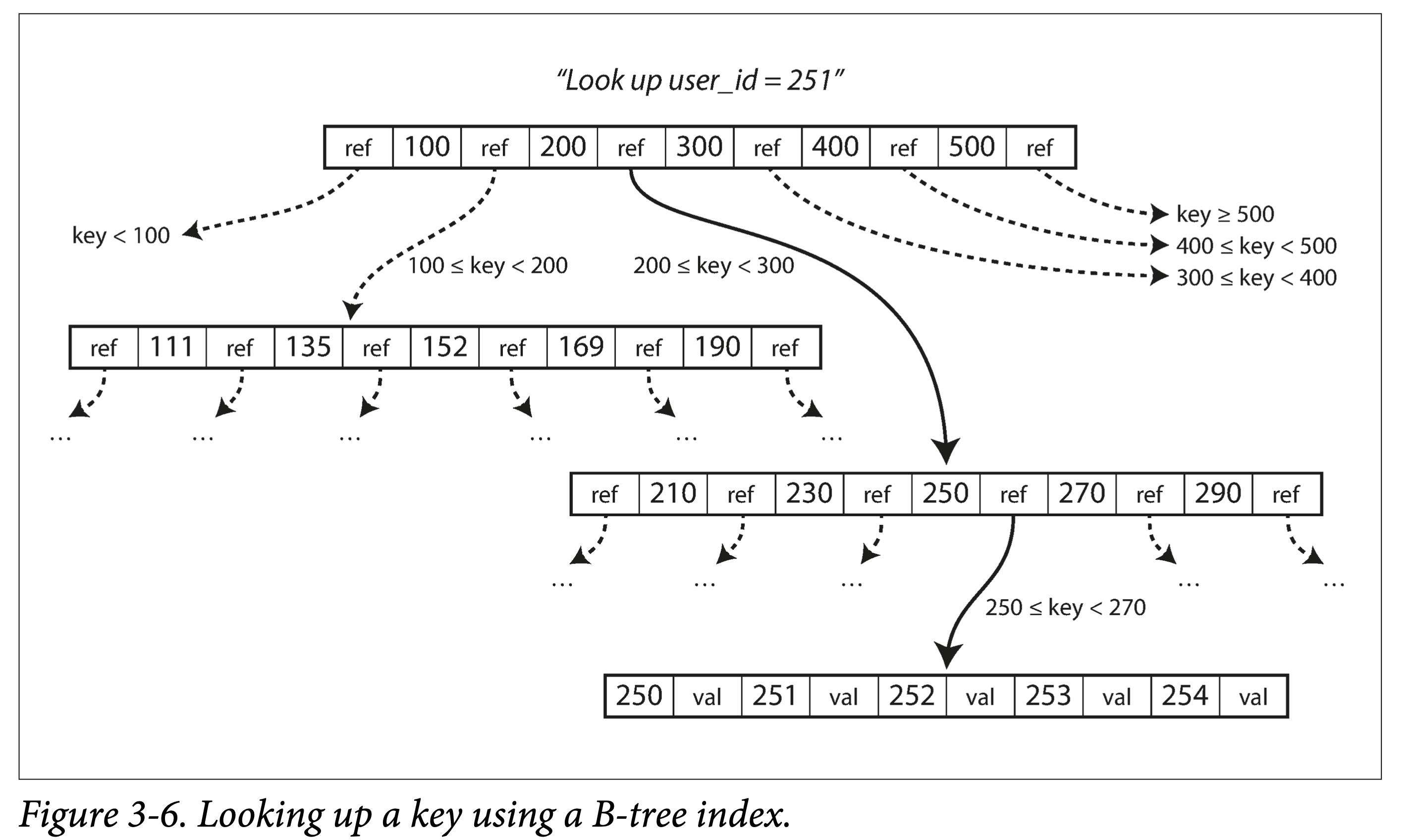
查找。从根节点出发,进行二分查找,然后加载新的页到内存中,继续二分,直到命中或者到叶子节点。 查找复杂度,树的高度 —— O (lgn),影响树高度的因素:分支因子(分叉数,通常是几百个)。
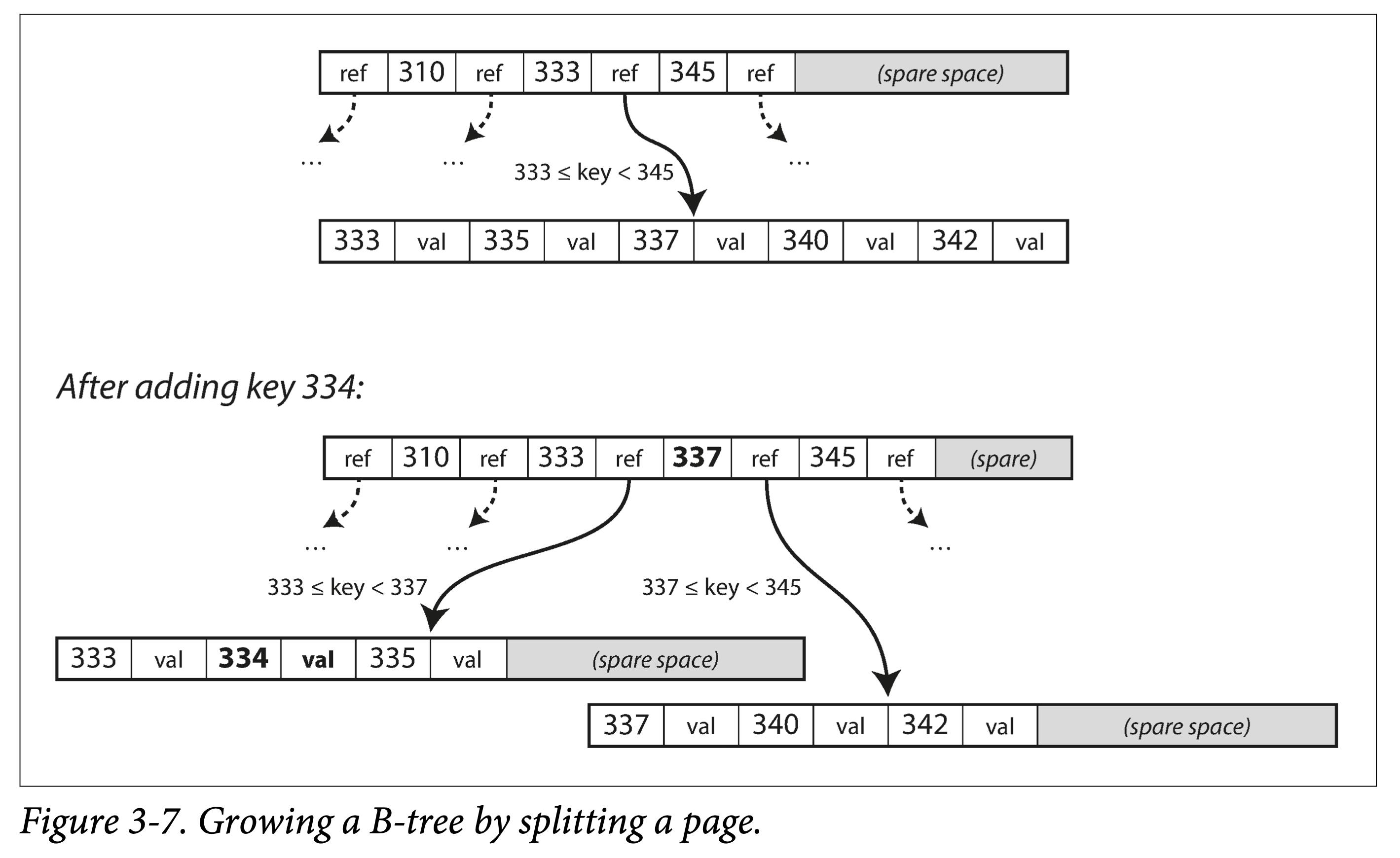
插入 or 更新。和查找过程一样,定位到原 Key 所在页,插入或者更新后,将页完整写回。如果页剩余空间不够,则分裂后写入。
分裂 or 合并。级联分裂和合并。
一个记录大于一个 page 怎么办?
- 树的节点是逻辑概念,page or block 是物理概念。一个逻辑节点可以对应多个物理 page。
让 B 树更可靠
B 树不像 LSM-Tree ,会在原地修改数据文件。
在树结构调整时,可能会级联修改很多 Page。比如叶子节点分裂后,就需要写入两个新的叶子节点,和一个父节点(更新叶子指针)。
- 增加预写日志(WAL),将所有修改操作记录下来,预防宕机时中断树结构调整而产生的混乱现场。
- 使用 latch 对树结构进行并发控制。
B 树的优化
B 树出来了这么久,因此有很多优化:
- 不使用 WAL,而在写入时利用 Copy On Write 技术。同时,也方便了并发控制。如 LMDB、BoltDB。
- 对中间节点的 Key 做压缩,保留足够的路由信息即可。以此,可以节省空间,增大分支因子。
- 为了优化范围查询,有的 B 族树将叶子节点存储时物理连续。但当数据不断插入时,维护此有序性的代价非常大。
- 为叶子节点增加兄弟指针,以避免顺序遍历时的回溯。即 B+ 树的做法,但远不局限于 B+ 树。
- B 树的变种,分形树,从 LSM-tree 借鉴了一些思想以优化 seek。
B-Trees 和 LSM-Trees 对比
|
存储引擎 |
B-Tree |
LSM-Tree |
备注 |
|
优势 |
读取更快 |
写入更快 |
|
|
写放大 |
1. 数据和 WAL 2. 更改数据时多次覆盖整个 Page |
1. 数据和 WAL 2. Compaction |
SSD 不能过多擦除。因此 SSD 内部的固件中也多用日志结构来减少随机小写。 |
|
写吞吐 |
相对较低: 1. 大量随机写。 |
相对较高: 1. 较低的写放大(取决于数据和配置) 2. 顺序写入。 3. 更为紧凑。 |
|
|
压缩率 |
1. 存在较多内部碎片。 |
1. 更加紧凑,没有内部碎片。 2. 压缩潜力更大(共享前缀)。 |
但紧缩不及时会造成 LSM-Tree 存在很多垃圾 |
|
后台流量 |
1. 更稳定可预测,不会受后台 compaction 突发流量影响。 |
1. 写吞吐过高,compaction 跟不上,会进一步加重读放大。 2. 由于外存总带宽有限,compaction 会影响读写吞吐。 3. 随着数据越来越多,compaction 对正常写影响越来越大。 |
RocksDB 写入太过快会引起 write stall,即限制写入,以期尽快 compaction 将数据下沉。 |
|
存储放大 |
1. 有些 Page 没有用满 |
1. 同一个 Key 存多遍 |
|
|
并发控制 |
1. 同一个 Key 只存在一个地方 2. 树结构容易加范围锁。 |
同一个 Key 会存多遍,一般使用 MVCC 进行控制。 |
|
本文来自博客园,作者:邴越,转载请注明原文链接:https://www.cnblogs.com/binyue/p/17264472.html
以上是关于设计数据密集型应用的主要关注点的主要内容,如果未能解决你的问题,请参考以下文章