UWB和lidar坐标系下轨迹对齐[附源码]
Posted chengwei0019
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了UWB和lidar坐标系下轨迹对齐[附源码]相关的知识,希望对你有一定的参考价值。
目录
代码:
#include <iostream>
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/Geometry>
#include <opencv2/opencv.hpp>
#ifndef M_PI
#define M_PI 3.14159265358979323846 // pi
#endif // !M_PI
void GetTransform(
const std::vector<Eigen::Vector3f> &xs,
const std::vector<Eigen::Vector3f> &ys,
Eigen::Matrix4f &transformation_);
int main()
int N = 30;
double w_sigma = 1.0;
double inv_sigma = 1.0 / w_sigma;
//cv::RNG rng;
cv::RNG rng((unsigned)time(NULL));
std::vector<Eigen::Vector3f> ori_data,aft_data;
for (int i = 0; i < N; i++)
double a = rng.uniform(-100, 100);
double b = rng.uniform(-100, 100);
double c = rng.uniform(-100, 100);
ori_data.push_back(Eigen::Vector3f(a, b, c));
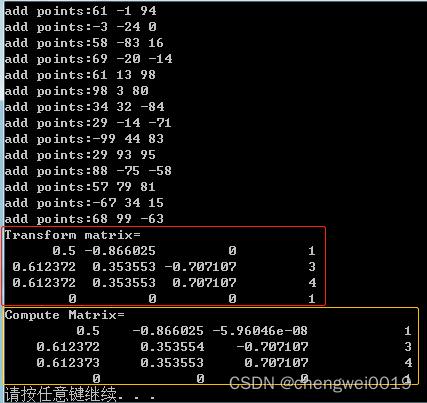
std::cout << "add points:" << a << " " << b << " " << c << std::endl;
Eigen::AngleAxisf r_z(M_PI / 3, Eigen::Vector3f(0, 0, 1));
Eigen::AngleAxisf r_x(M_PI / 4, Eigen::Vector3f(1, 0, 0));
Eigen::Isometry3f T = Eigen::Isometry3f::Identity();
T.rotate(r_x*r_z);
T.pretranslate(Eigen::Vector3f(1, 3, 4));
std::cout << "Transform matrix=\\n" << T.matrix() << std::endl;
for (int i = 0; i < N; i++)
Eigen::Vector3f v = ori_data[i];
aft_data.push_back(T*v);
Eigen::Matrix4f transform;
GetTransform(aft_data, ori_data, transform);
std::cout << "Compute Matrix=\\n" << transform << std::endl;
system("pause");
return 0;
// 通过SVD分解计算R和t
void GetTransform(
const std::vector<Eigen::Vector3f> &xs,
const std::vector<Eigen::Vector3f> &ys,
Eigen::Matrix4f &transformation_)
const size_t N = xs.size();
// TODO: find centroids of mu_x and mu_y:
// 计算均值
Eigen::Vector3f mu_x = Eigen::Vector3f::Zero();
Eigen::Vector3f mu_y = Eigen::Vector3f::Zero();
for (size_t i = 0; i < N; ++i)
mu_x += xs.at(i);
mu_y += ys.at(i);
mu_x /= N;
mu_y /= N;
// TODO: build H:
// 构建H
Eigen::Matrix3f H = Eigen::Matrix3f::Zero();
for (size_t i = 0; i < N; ++i)
H += (ys.at(i) - mu_y) * (xs.at(i) - mu_x).transpose();
// TODO: solve R:
// 求解R
Eigen::JacobiSVD<Eigen::MatrixXf> svd(H, Eigen::ComputeThinU | Eigen::ComputeThinV);
Eigen::Matrix3f R = svd.matrixV()*svd.matrixU().transpose();
// TODO: solve t:
// 求解t
Eigen::Vector3f t = mu_x - R * mu_y;
// TODO: set output:
// 组织输出形式
transformation_.setIdentity();
transformation_.block(0, 0, 3, 3) = R;
transformation_.block(0, 3, 3, 1) = t;
输出如下:
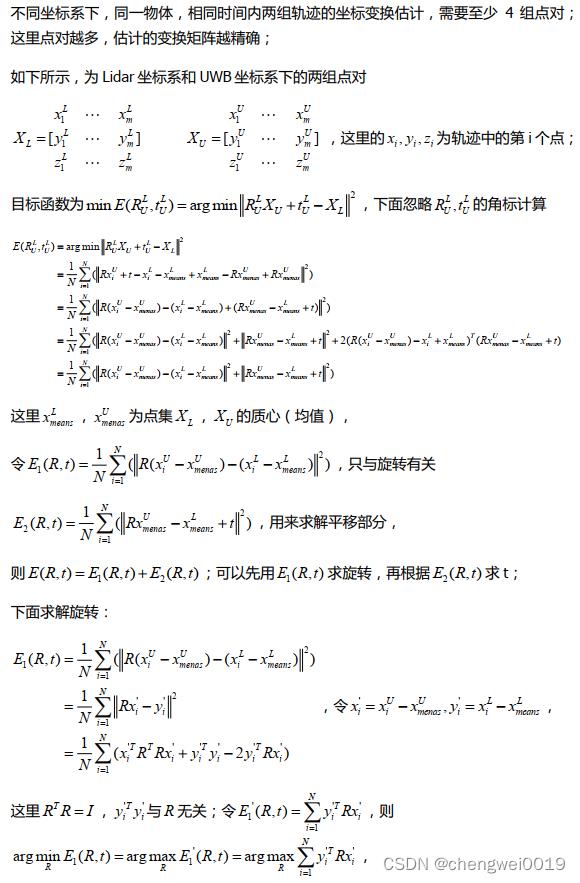
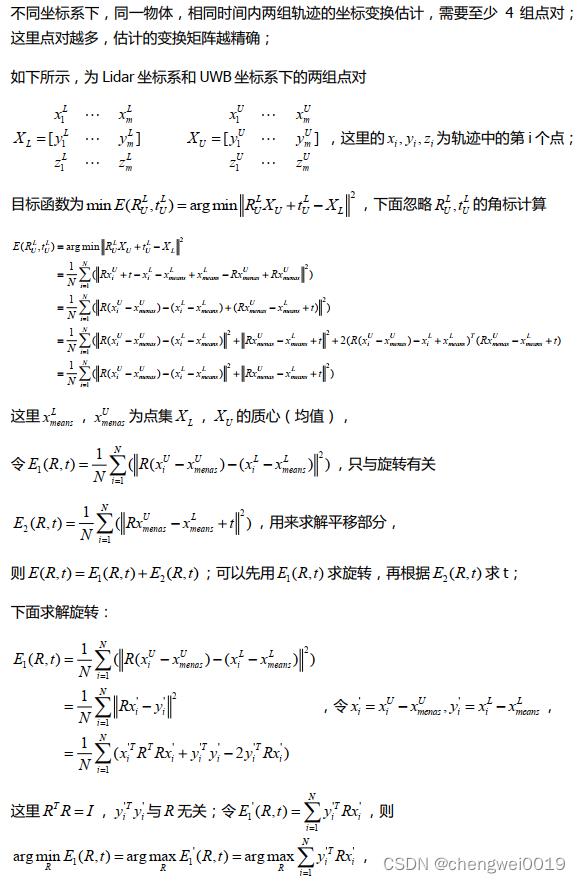
理论推导:
以上是关于UWB和lidar坐标系下轨迹对齐[附源码]的主要内容,如果未能解决你的问题,请参考以下文章