C++调用opencv完成运动目标捕捉
Posted 一个不同的ID
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了C++调用opencv完成运动目标捕捉相关的知识,希望对你有一定的参考价值。
使用编译器:Qt Creator 4.2.1
目录
1.将传入的两帧先进行灰度处理,转化将rgb类型图片转化为灰度图,可大大降低处理时间和资源消耗
3.将图像二值化,只有黑和白,便于计算机计算,但是会产生噪点(后续会进行简单的降噪操作)
4.腐蚀处理,腐蚀掉*x方块大小的像素,我这里设置了4*4,清除大部分噪点
5. 膨胀处理,把去除过噪点的像素图像膨胀,变大,我这里膨胀了30*30
一、原理说明:
差帧识别原理:将这一帧的图像和上一帧的图像进行比对,产生变化的即为运动的目标像素块
二、过程详解:
1.将传入的两帧先进行灰度处理,转化将rgb类型图片转化为灰度图,可大大降低处理时间和资源消耗
将转换后的图片转存至frontGray和afterGray
cvtColor(frontFrame,frontGray,CV_BGR2GRAY);
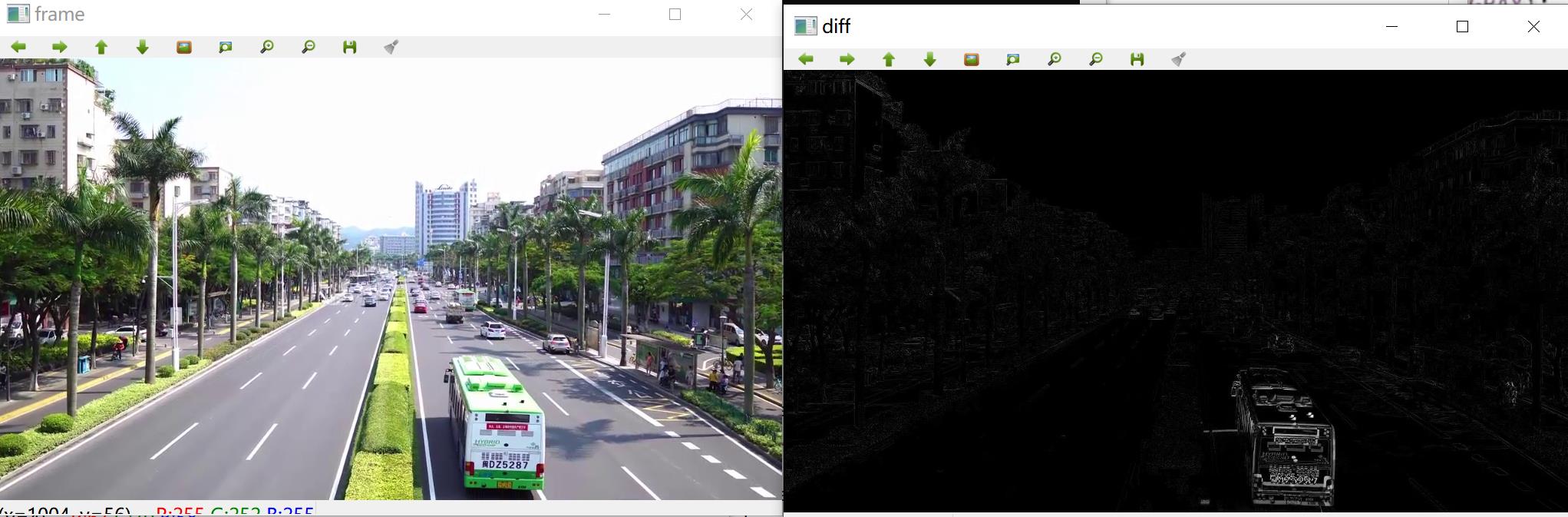
cvtColor(afterFrame,afterGray,CV_BGR2GRAY);2.将两帧图片进行差帧处理
将有差别的像素转存至diff
//帧差处理 找到两帧之间运动物体差异
//缺点:会捕捉所有运动的物体,没办法专门捕捉某个目标
absdiff(frontGray,afterGray,diff);效果如下:
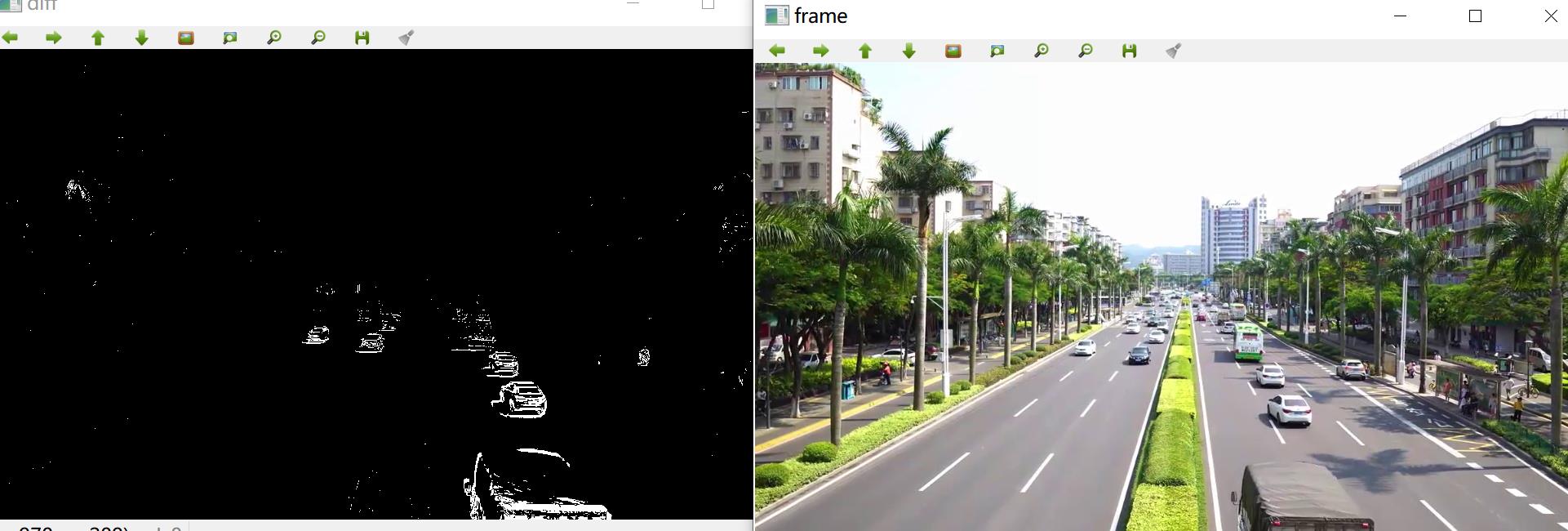
3.将图像二值化,只有黑和白,便于计算机计算,但是会产生噪点(后续会进行简单的降噪操作)
//二值化: 使其变得更加黑白分明,便于计算,会产生噪点
threshold(diff,diff,25,255,CV_THRESH_BINARY);效果如下:
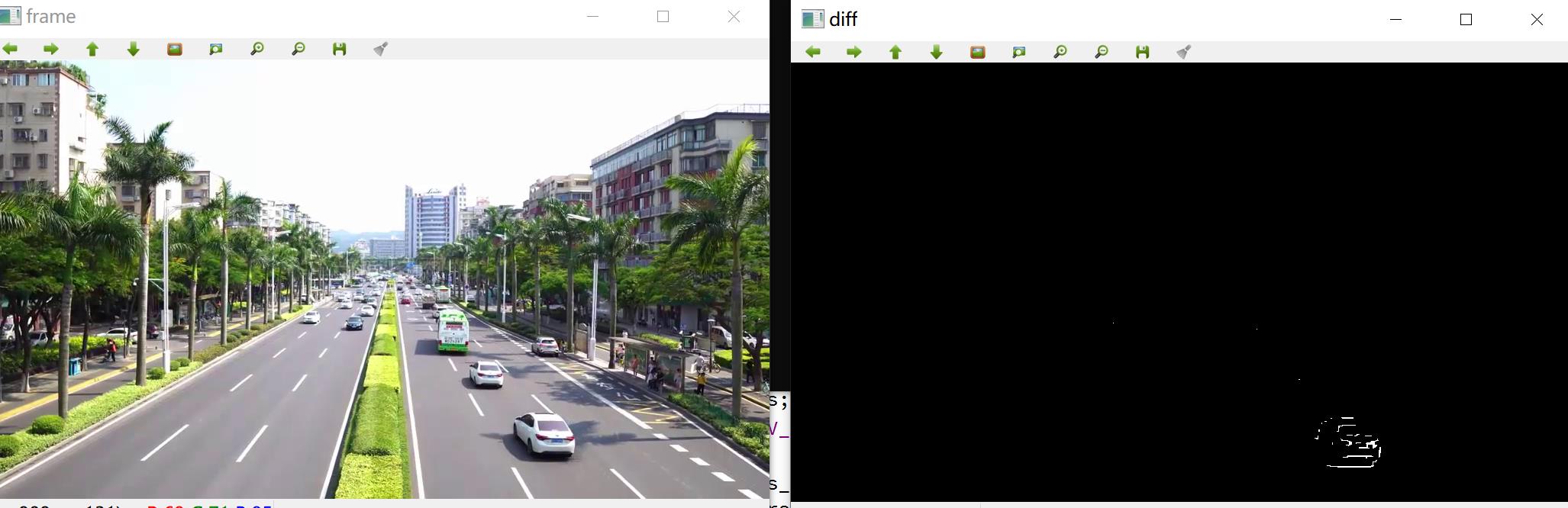
4.腐蚀处理,腐蚀掉<x*x方块大小的像素,我这里设置了4*4,清除大部分噪点
//腐蚀处理:去除大部分的白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(4,4));
//小于4*4方块的白色噪点都会被腐蚀
erode(diff,diff,element);效果如下,噪点确实少了很多,但是运动的物体也被腐蚀掉了很多,可能会出现漏掉运动物体的情况
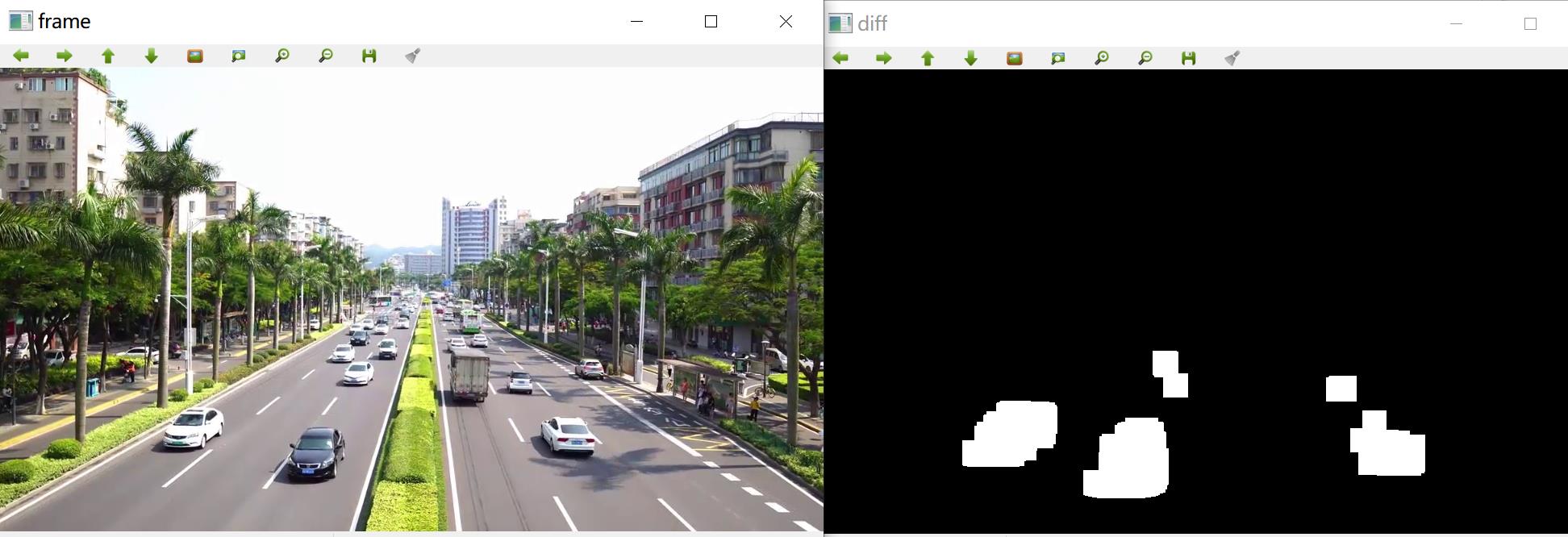
5. 膨胀处理,把去除过噪点的像素图像膨胀,变大,我这里膨胀了30*30
//膨胀处理:将白色区域变"胖",便于识别
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(30,30));
dilate(diff,diff,element2);效果如下:
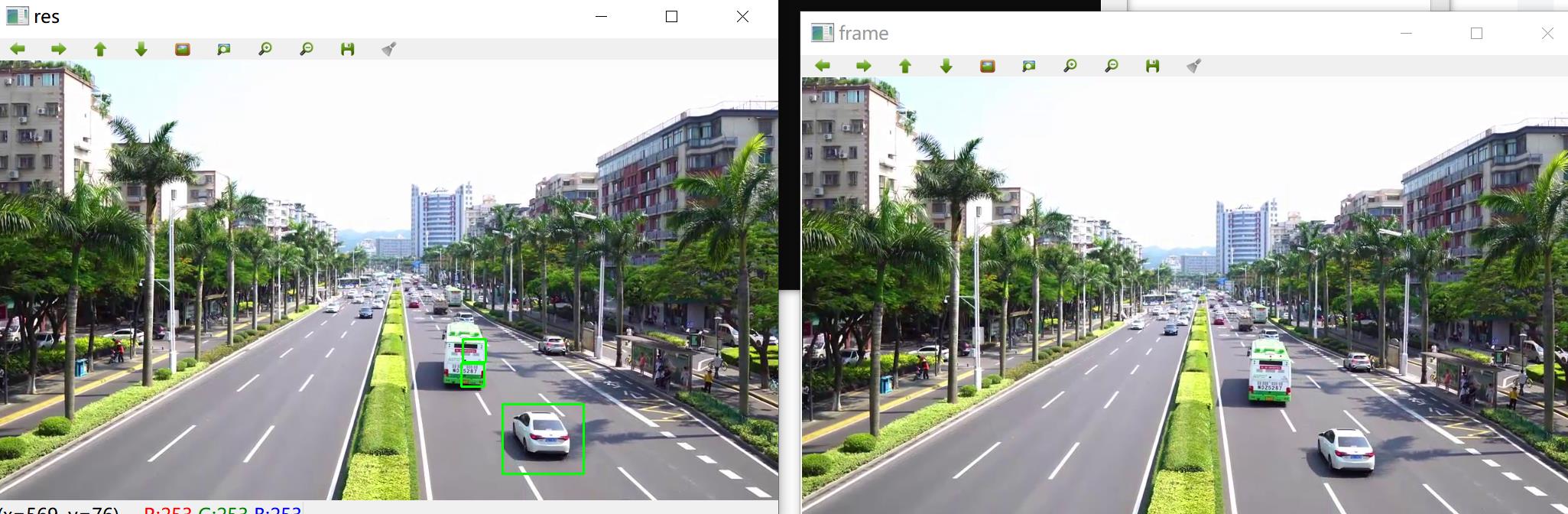
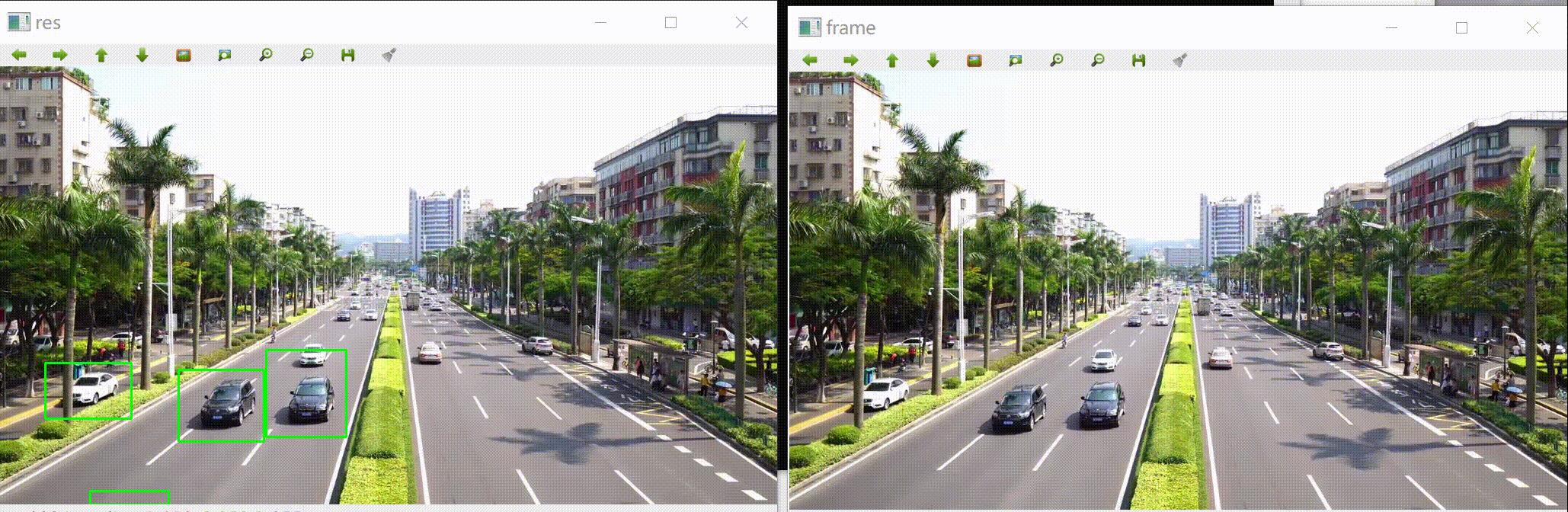
6.将变动过的像素目标打上标记(注意要在原帧上进行标记)
//动态物体标记
vector<vector<Point>>contours;//用于保存关键点
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
int x,y,w,h;
int num=contours.size();
for(int i=0;i<num;i++)
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,255,0),2);
效果如下:
三、代码
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace cv;
using namespace std;
Mat moveCheck(Mat &frontFrame,Mat &afterFrame)
Mat frontGray,afterGray,diff;
Mat resFrame=afterFrame.clone();
//灰度处理,节省运算时间
cvtColor(frontFrame,frontGray,CV_BGR2GRAY);
cvtColor(afterFrame,afterGray,CV_BGR2GRAY);
//帧差处理 找到两帧之间运动物体差异
//缺点:会捕捉所有运动的物体,没办法专门捕捉某个目标
absdiff(frontGray,afterGray,diff);
//二值化: 使其变得更加黑白分明,便于计算,会产生噪点
threshold(diff,diff,25,255,CV_THRESH_BINARY);
//腐蚀处理:去除大部分的白色噪点
Mat element = cv::getStructuringElement(MORPH_RECT,Size(4,4));//小于4*4方块的白色噪点都会被腐蚀
erode(diff,diff,element);
//膨胀处理:将白色区域变"胖",便于识别
Mat element2=cv::getStructuringElement(MORPH_RECT,Size(30,30));
dilate(diff,diff,element2);
//动态物体标记
vector<vector<Point>>contours;//用于保存关键点
findContours(diff,contours,CV_RETR_EXTERNAL,CV_CHAIN_APPROX_SIMPLE,Point(0,0));
//提取关键点
vector<vector<Point>>contours_poly(contours.size());
vector<Rect>boundRect(contours.size());
int x,y,w,h;
int num=contours.size();
for(int i=0;i<num;i++)
approxPolyDP(Mat(contours[i]),contours_poly[i],3,true);
boundRect[i]=boundingRect(Mat(contours_poly[i]));
x=boundRect[i].x;
y=boundRect[i].y;
w=boundRect[i].width;
h=boundRect[i].height;
//绘制
rectangle(resFrame,Point(x,y),Point(x+w,y+h),Scalar(0,255,0),2);
return resFrame;
int main(int argc, char *argv[])
Mat frame;
Mat temp;
Mat res;
int num=0;
VideoCapture cap("D:/VideoTraining/carMove.mp4");
while (cap.read(frame))
num++;
if(num==1)
//如果为第一帧则把当前帧传入(即不产生效果)
res=moveCheck(frame,frame);
else
//从第二帧开始才有差帧
res=moveCheck(temp,frame);
temp=frame.clone();//此处注意要调用.clone深拷贝,否则会出现两个画面一样的情况
imshow("frame",frame);
imshow("res",res);
waitKey(25);
return 0;
QT下配置opencv可以看看这一篇:
 https://blog.csdn.net/baidu_38326512/article/details/124235789?spm=1001.2014.3001.5502
https://blog.csdn.net/baidu_38326512/article/details/124235789?spm=1001.2014.3001.5502以上是关于C++调用opencv完成运动目标捕捉的主要内容,如果未能解决你的问题,请参考以下文章