计算机视觉算法——图像分割网络总结
Posted Leo-Peng
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了计算机视觉算法——图像分割网络总结相关的知识,希望对你有一定的参考价值。
计算机视觉算法——图像分割网络总结
计算机视觉算法——图像分割网络总结
我关注的B站Up主霹雳吧啦Wz又更新了图像分割相关的学习视频,之前跟着Up主已经学习了
计算机视觉算法——图像分类网络总结
计算机视觉算法——目标检测网络总结
两方面知识,图像分割同样也是计算机视觉中非常重要的的一部分,这篇博客就是跟着Up主学习的一个学习笔记,中间会补充一些我的个人理解,想要完整学习的读者建议还是跟着原视频学习一遍,会更有收获的。
1. FCN
FCN发表于2015年CVPR,论文全称为《Fully Convolutional Networks for Semantic Segmentation》是首个端对端的针对像素级预测的全卷积网络
1.1 关键知识点——网络结构及特点
FCN网络结构如下图所示,是通过将VGG16网络最后三层的全连接网络替换为全卷积网络,将网络最后的输出也由分类结果变化成一张热力图,而这张热力图通过上采样最终就能获得我们需要的分割结果: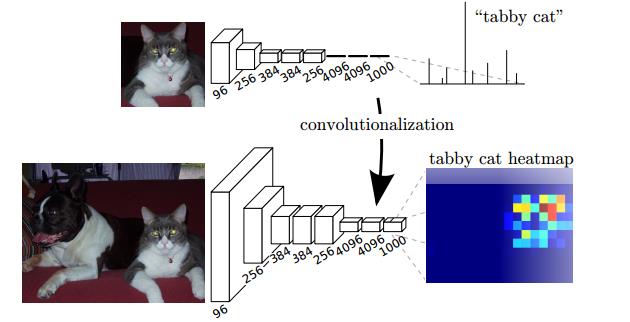
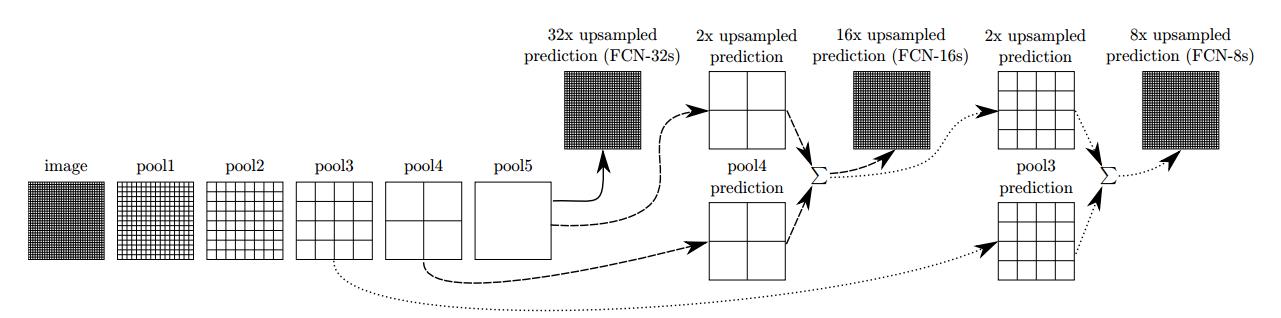
具体的网络结构一共有三种,分别是FCN-32s、FCN-16s和FCN-8s,如下图所示,分别指的是选取不同的特征层分别进行32倍、16倍和8倍上采样得到:
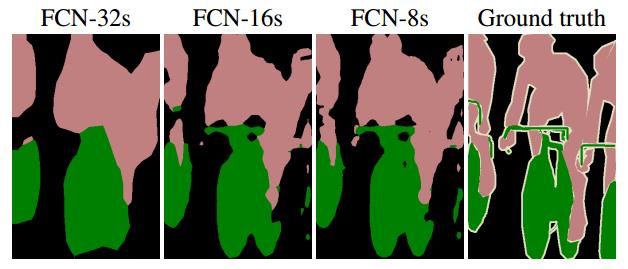
在论文的实验结果中,由于FCN-8s融合(特征层相加)更多的特征信息,因此它的结果是最好的,如下图所示:
1.2 关键知识点——转置卷积
转置卷积是Transposed Convolution的直译,又可以称为fractionally-strided convolution或者deconvolution,FCN网络中上采样的部分就是使用的转置卷积。说先对于上采样,我们知道常见的有最近邻插值、双线性插值等,如下图就是双线性插值的结果: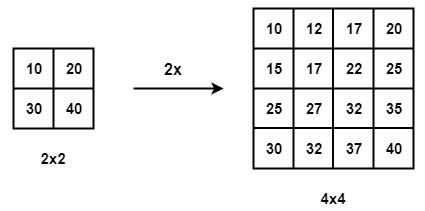
这样的插值方法是固定的,是不可学习的,而转置卷积也是卷积,其kernel是可以学习的,转置卷积的具体步骤如下:
(1)在输入特征图元素间填充
stride
−
1
\\textstride-1
stride−1行和列;
(2)在输入特征图四周填充
kernelsize
−
padding
−
1
\\textkernelsize-\\textpadding-1
kernelsize−padding−1行和列;
(3)将卷积核参数上下、左右翻转;
(4)做正常卷积运算;
经过转置卷积后特征图大小变为:
H
out
=
(
H
in
−
1
)
×
stride
[
0
]
−
2
×
padding
[
0
]
+
kernelsize
[
0
]
W
out
=
(
W
in
−
1
)
×
stride[1]
−
2
×
padding
[
1
]
+
kernelsize[1]
\\beginaligned H_\\text out &=\\left(H_\\text in -1\\right) \\times \\text stride [0]-2 \\times \\text padding [0]+\\text kernelsize [0] \\\\ W_\\text out &=\\left(W_\\text in -1\\right) \\times \\text stride[1] -2 \\times \\text padding [1]+\\text kernelsize[1] \\endaligned
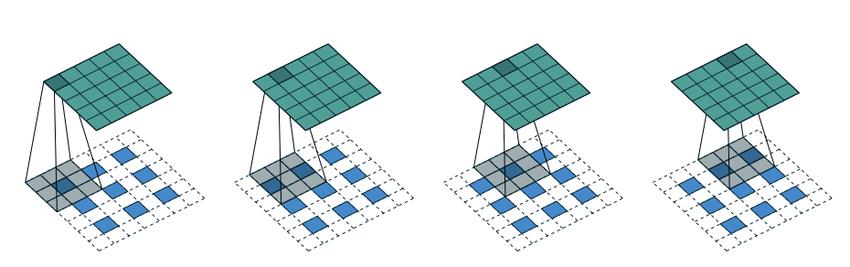
Hout Wout =(Hin −1)× stride [0]−2× padding [0]+ kernelsize [0]=(Win −1)× stride[1] −2× padding [1]+ kernelsize[1] 如下图就是
stride
=
2
,
kernelsize
=
3
,
padding
=
1
\\textstride=2,\\textkernelsize=3,\\textpadding=1
stride=2,kernelsize=3,padding=1的情况:
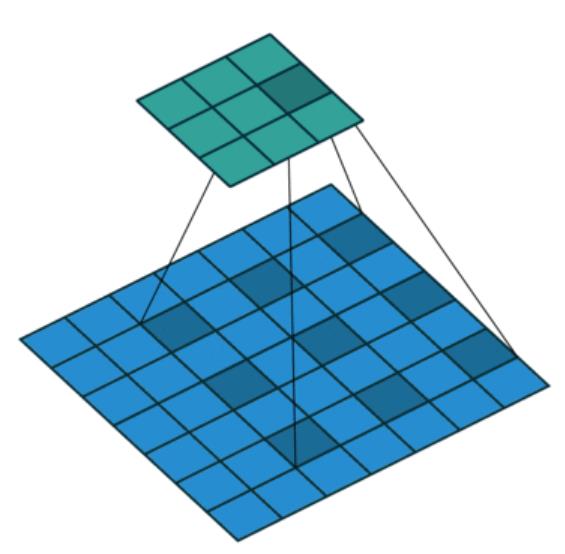
 读者看到这里可能有两个问题:(1)为什么叫做转置卷积呢?(2)为什么要对卷积核参数进行上下、左右翻转呢?这里我们通过一个实际例子来分析,我们从普通的卷积过程开始,如下图所示
读者看到这里可能有两个问题:(1)为什么叫做转置卷积呢?(2)为什么要对卷积核参数进行上下、左右翻转呢?这里我们通过一个实际例子来分析,我们从普通的卷积过程开始,如下图所示
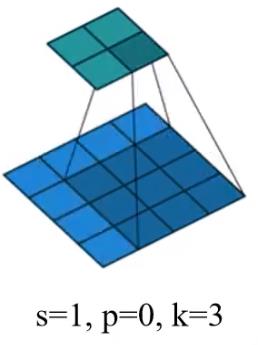
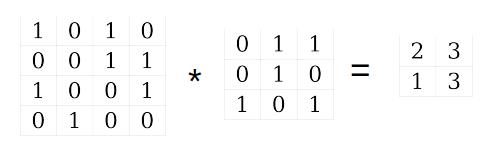
我们定义卷积符号为
∗
*
∗,那么该过程可以写为:
我们将起写为等效矩阵的形式,即输出特征图各个元素都等于输入特征图与某个等效矩阵相乘的结果,而这个等效矩阵就是由卷积的Kernel平移和填充而来,我们用符号
×
×
×表示这个过程,如下所示: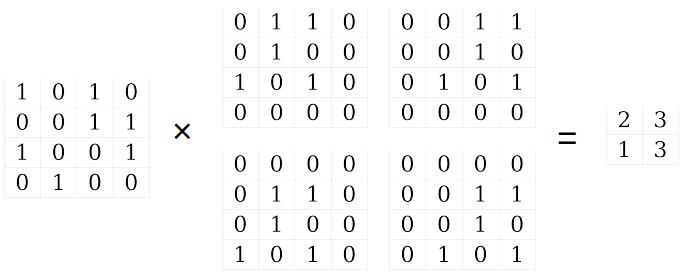
等效矩阵的方式又可以进一步通过矩阵的相乘的方式表达,其中符号
@
@
@表示矩阵乘法:
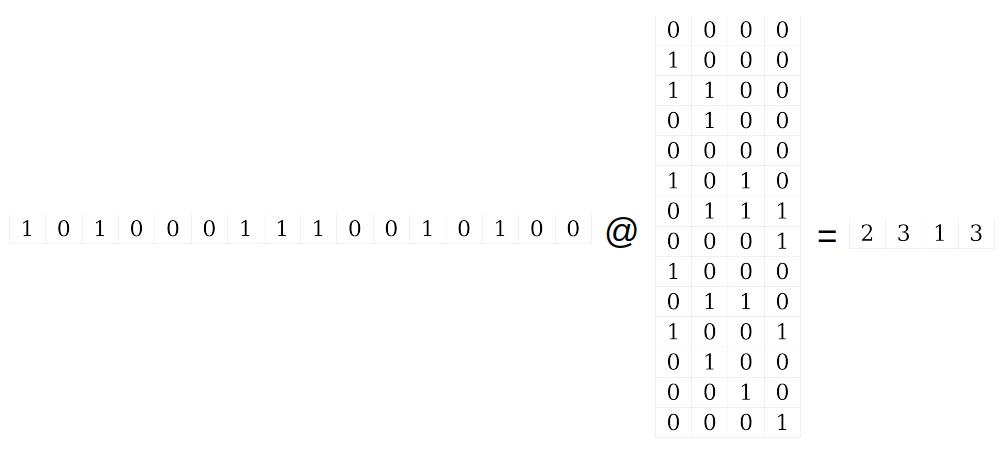
以上我们将一个
1
×
16
1×16
1×16维的矩阵通过与
16
×
4
16×4
16×4的矩阵相乘变成了
1
×
4
1×4
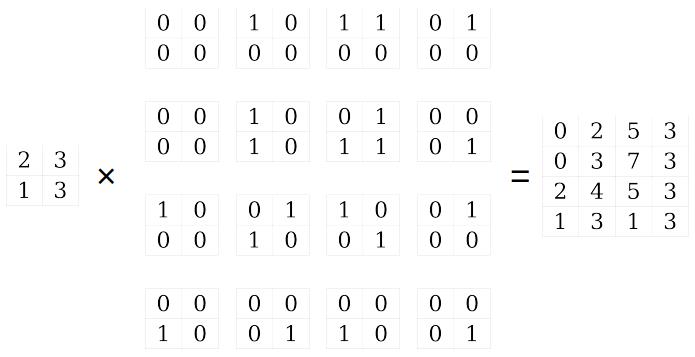
1×4维的矩阵,这个降维过程是不可逆的,但是我们可以通过将
1
×
4
1×4
1×4维的矩阵乘以
16
×
4
16×4
16×4的矩阵的转置得到一个新的
1
∗
16
1*16
1∗16的矩阵,如下所示: 该过程可以类似地转换为等效矩阵的方式表达:
该过程可以类似地转换为等效矩阵的方式表达:
 最后我们再将等效矩阵的形式转化为卷积的形式,那么就得到了转置卷积的结果:
最后我们再将等效矩阵的形式转化为卷积的形式,那么就得到了转置卷积的结果:
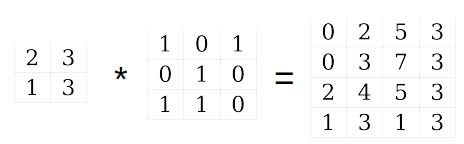
如下图所示:
从上面的流程中可以看到,对于同一个卷积核,如果是转置卷积就需要先对卷积核进行上下、左右翻转,然后再进行普通卷积,得到的才是正确的转置卷积的结果,而为什么称为转置卷积应该也和上述步骤中的转置过程有关,也进一步说明转置卷积并不是卷积的逆运算。
1.3 关键知识点——语义分割评价指标
这里介绍常见的三种语义分割评价指标,其中
n
i
j
n_ij
nij表示类别
i
i
i被预测成类别
j
j
j的像素个数,
n
c
l
s
n_cls
ncls表示目标类别个数(包含背景),
t
i
=
∑
j
n
i
j
t_i=\\sum_j n_i j
ti=∑jnij表示类别
i
i
i的总像素个数:
(1)Pixel Accuracy(Global Accuracy)
∑
i
n
i
i
∑
i
t
i
\\frac\\sum_i n_i i\\sum_i t_i
∑iti∑inii表示的就是预测正确的像素和总像素个数的比。
(2)Mean Accuracy
1
n
c
l
s
⋅
∑
i
n
i
i
t
i
\\frac1n_c l s \\cdot \\sum_i \\fracn_i it_i
ncls1⋅i∑tinii表示的是每个类别预测正确的像素和属于该类别像素的比,最后再根据类别求平均的值。
(3)Mean IoU
1
n
c
l
s
⋅
∑
n
i
i
t
i
+
∑
j
n
j
i
−
n
u
\\frac1n_c l s \\cdot \\sum \\fracn_i it_i+\\sum_j n_j i-n_u
ncls1⋅∑ti+∑jnji−nunii表示的是每个类别IoU,最后根据类别求平均的值。这里的IoU和目标检测中IoU定义基本上是一致的,就是目标检测结果与对应真值的面积交集比上面积并集。Mean IoU是在论文最常见的指标之一。
2. DeepLab
DeepLab一共有三个系列,分别是Deep Lab V1、V2、V3,下面分别介绍
2.1 DeepLab V1
DeepLab V1发表于2014年的CVPR,论文全称为《Semantic Image Segmentation with Deep Convolutional Nets and Fully Connnected CRFs》,论文引言中提出,将Deep Convolutional Neural Network用于语义分割任务上主要存在两个难点分别是Signal Sampling和Spatial Insensitivity,其中前者指的是网络的下采样部分会使得图像的分辨率降低,后者指的是空间不敏感的问题(语义分割是需要空间敏感的,对于同一物体的不同观察需要结果不同),针对这两个问题作者分别提出了膨胀卷积和Fully-Connected Conditional Random Field两个解决方案。
2.1.1 关键知识点——网络结构及特点
DeepLab V1网络结构和FCN其实差别不大,都是有VGG16网络改进升级而来,具体的网络结构我们在V2和V3时再做进一步介绍。
DeepLab V1网络的特点是:
(1)速度更快,主要是采用了空洞卷积原因,但是Fully-Connected Conditional Random Field仍然比较耗时;
(2)准确率更高,如下图所示:
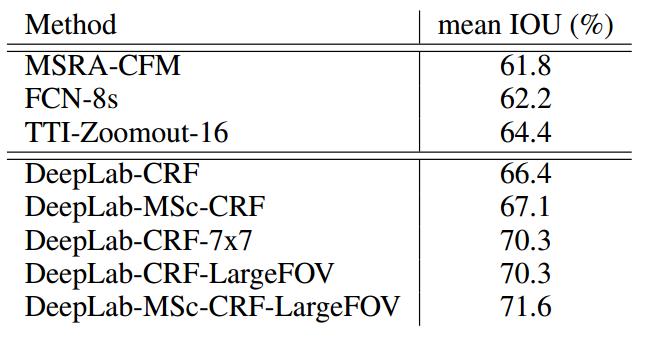
在对比中Deep Lab的几个参数
CRF指的是Conditional Random Field模块,该模块在升级到DeepLab V3后就不再使用了,因此就不在此进行介绍。
MSc指的是Multi-Scale模块,将输入以及前四层最大池化后的特征层通过两层MLP和网络最后的输出特征concatenate到一起,该模块能稍微提高mean IoU指标,但是会增大网络参数数量,因此作者不建议使用,在此我们也不进行过多介绍。
LargeFOV模块其实指的就是对膨胀卷积的应用,前面说到,DeepLab网络和FCN网络一样同样是在VGG16网络上的基础上将最后三层全连接层转化为卷积层,作者指出者三层卷基层中的第一层原本使用的大小为
7
×
7
7\\times7
7×7的4096个卷积核,但是这成为了网络计算的瓶颈,因此作者将该层更换为了大小为
4
×
4
4\\times4
4×4的膨胀卷积,其作用是在不降低网络的mean IoU指标的前提下,降低网络的参数数量以及加快网络的训练速度,具体实现后文详解。
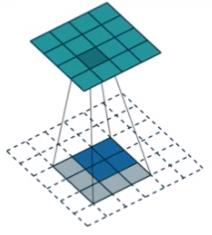
2.1.2 关键知识点——膨胀卷积
膨胀卷积又名空洞卷积,如下就是膨胀因子为2的膨胀卷积的示意图,其实就是卷积本身是带有空洞的:
其作用主要是可以:
(1) 增大感受野,所谓增大感受野我们可以通过感受野的计算公式实际计算下,感受野计算公式如下:
r
l
=
r
l
−
1
+
(
k
l
−
1
)
×
j
l
−
1
r_l = r_l-1+(k_l-1)\\times j_l-1
rl=rl−1+(kl−1)×jl−1其中
r
l
r_l
rl为第
l
l
l层感受野,
k
l
k_l
kl以上是关于计算机视觉算法——图像分割网络总结的主要内容,如果未能解决你的问题,请参考以下文章