霍夫直线检测代码实战
Posted 秃头小苏
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了霍夫直线检测代码实战相关的知识,希望对你有一定的参考价值。
🍊作者简介:秃头小苏,致力于用最通俗的语言描述问题
🍊往期回顾:霍夫直线检测原理详解
🍊近期目标:拥有2000粉丝
🍊支持小苏:点赞👍🏼、收藏⭐、留言📩
霍夫直线检测代码实战
上一节我们详细讲解了霍夫直线原理,想弄清楚霍夫直线检测原理的请前去阅读🚗🚗🚗这一节我们主要来进行代码实战——对车道线进行检测。🏝🏝🏝
本节主要利用opencv中提供的2个函数进行检测,分别为HoughLines和HoughLinesP函数。这里给出opencv官网对两个函数的解释,点击了解详情。当然,这里也会给出相关的中文含义,如下:
-
HoughLines函数🌸
void cv::HoughLines ( InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn = 0, double stn = 0, double min_theta = 0, double max_theta = CV_PI ) //InputArray image: 输入图像,必须是8位单通道图像。 //OutputArray lines: 检测到的线条参数集合。 //double rho: 以像素为单位的距离步长。 //double theta: 以弧度为单位的角度步长。 //int threshold: 累加计数值的阈值参数,当参数空间某个交点的累加计数的值超过该阈值,则认为该交点对应了图像空间的一条直线。 //double srn: 默认值为0,用于在多尺度霍夫变换中作为参数rho的除数,rho=rho/srn。 //double stn: 默认值为0,用于在多尺度霍夫变换中作为参数theta的除数,theta=theta/stn。 //如果srn和stn同时为0,就表示HoughLines函数执行标准霍夫变换,否则就是执行多尺度霍夫变换。 //min_theta: 默认值为0 对于标准和多尺度霍夫变换,检查线的最小角度。必须介于 0 和 max_theta 之间。 //max_theta: 默认值为pi 对于标准和多尺度霍夫变换,检查线的最大角度。必须介于 min_theta 和 CV_PI 之间。
注意: HoughLines函数的输出存储在lines中,lines中存储的是检测到的直线的集合,每条直线由两个元素构成的向量(r, θ)表示,其中r表示直线距离原点(0, 0)的长度,θ表示直线的角度(以弧度为单位)。【r,θ的具体描述在上一节霍夫直线原理中有涉及】
-
HoughLinesP函数🌸
void cv::HoughLinesP ( InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLength = 0, double maxLineGap = 0 ) //InputArray image:输入图像,必须是8位单通道图像。 //OutputArray lines:检测到的线条参数集合。 //double rho:直线搜索时的距离步长,以像素为单位。 //double theta:直线搜索时的角度步长,以弧度为单位。 //int threshold:累加计数值的阈值参数,当参数空间某个交点的累加计数的值超过该阈值,则认为该交点对应了图像空间的一条直线。 //double minLineLength:默认值为0,表示最小线段长度阈值(像素)。 //double maxLineGap:线段上最近两点之间的阈值.默认值为0,表示直线断裂的最大间隔距离阈值。即如果有两条线段是在一条直线上,但它们之间有间隙,那么如果这个间隔距离小于该值,则被认为是一条线段,否则认为是两条线段。注意:HoughLinesP函数的输出同样存储在lines中,lines中存储检测到的直线集合,没条直线由4个元素构成的向量(x1, y1, x2, y2)表示,其中(x1, y1)表示线段的起点,(x2, y2)表示线段的终点。
这里给出HoughLines函数和HoughLinesP函数的区别,从上文的描述中我们应该是能看出一些端倪的。HoughLines函数输出只给出了(r,θ),知道这两个值我们是无法计算出图像空间中线段的长度的;而HoughLinesP函数的输出给出了线段起点和终点的坐标,因此我们可以计算出图像空间中线段的长度。
介绍完HoughLines和HoughLinesP这两个函数,下面就一起来用代码小试牛刀一下叭🍭🍭🍭首先先来总结一下代码实现霍夫直线检测的步骤,如下:
- 将彩色图像转化为灰度图 【因为HoughLines和HoughLinesP这两个函数要求输入为8位单通道图像】
- 图像处理(包括去噪、边缘提取、二值化等等)
- 调用霍夫直线检测函数
- 绘制直线
下面直接上代码,搞起来兄弟们🍍🍍🍍
-
利用HoughLines函数进行直线检测
#include <opencv2/opencv.hpp> #include <vector> #include <iostream> int main() std::string img_path; cv::Mat mat_color; cv::Mat mat_gray; cv::Mat mat_binary; cv::Mat mat_canny; img_path = "E:\\\\毫米波雷达\\\\images.jpg"; mat_color = cv::imread(img_path, 1); mat_gray = cv::imread(img_path, 0); //形态学闭运算 cv::Mat elementRect; elementRect = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3), cv::Point(-1, -1)); cv::morphologyEx(mat_gray, mat_gray, cv::MORPH_CLOSE, elementRect); // binary cv::threshold(mat_gray, mat_binary, 125, 255.0, cv::THRESH_BINARY); // detect edge cv::Canny(mat_binary, mat_canny, 50, 125, 3); // detect line std::vector<cv::Vec2f> lines; cv::HoughLines(mat_canny, lines, 1, CV_PI / 180, 80, 0, 0); // draw line std::cout << "line number: " << lines.size() << std::endl; for (size_t i = 0; i < lines.size(); i++) cv::Vec2f linex = lines[i]; std::cout << "radius: " << linex[0] << ", angle: " << 180 / CV_PI * linex[1] << std::endl; float rho = lines[i][0], theta = lines[i][1]; cv::Point pt1, pt2; double a = cos(theta), b = sin(theta); double x0 = a * rho, y0 = b * rho; //下面的四行代码不知大家能不能理解,后文会专门对其进行解释 pt1.x = cvRound(x0 + 1000 * (-b)); pt1.y = cvRound(y0 + 1000 * (a)); pt2.x = cvRound(x0 - 1000 * (-b)); pt2.y = cvRound(y0 - 1000 * (a)); line(mat_color, pt1, pt2, cv::Scalar(0, 255, 0), 2); cv::imshow("gray", mat_gray); cv::imshow("binary", mat_binary); cv::imshow("canny", mat_canny); cv::imshow("color", mat_color); cv::waitKey(0); return 0;输出结果:
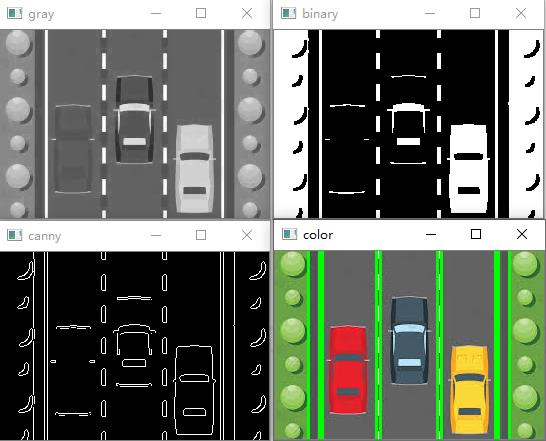
可以看出我们可以检测出车道线【注:当然这幅图的干扰因素比较少,若使用其他图片效果不一定这样理想,同时我们需要调节HoughLine中的参数对结果进行相应的调整,以达到最好的输出】
现对代码中比较难理解的一点进行解释,如下图所示:下图中的代码该如何理解呢?前面我们说到HoughLines函数的返回值只存储了线条的r和θ,那么我们如何来画出这条直线呢,这就用到了下面的代码。
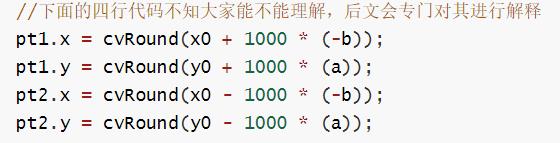
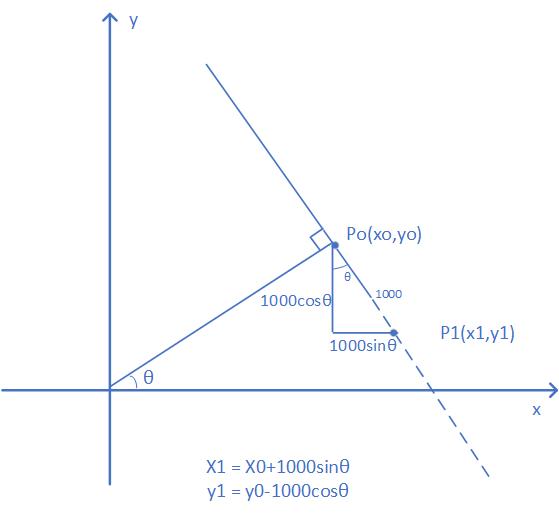
那上述代码该怎么理解呢?现已知(r,θ),其在程序中表现为r = rho = lines[i][0] , θ = theta = lines[i][1] 。那么 x0 = a * rho, y0 = b * rho为直线上该点在直角坐标系下坐标。【这一点由上一篇霍夫检测原理中图5得出】1000的目的是为了将线段延长。以(x0,y0)为基础进行延长。(x0 - 1000 * (-b))可以理解为(x0+1000*b)其中(1000*b)为该p0沿着直线方向延长1000后的点p1距离p0在x方向的距离,那么【x0+1000*b】即为p1的横坐标。为了方便大家理解,作了示意图如下:
-
利用HoughLinesP函数进行直线检测
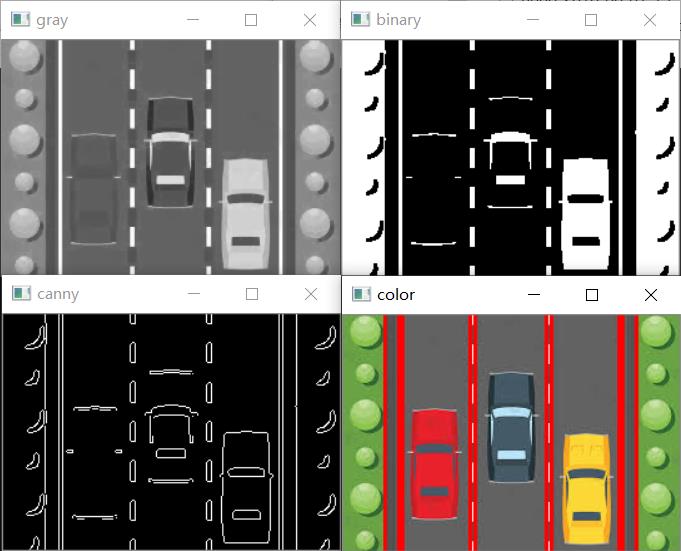
#include <opencv2/opencv.hpp> #include <vector> #include <iostream> int main() std::string img_path; cv::Mat mat_color; cv::Mat mat_gray; cv::Mat mat_binary; cv::Mat mat_canny; img_path = "E:\\\\毫米波雷达\\\\images.jpg"; mat_color = cv::imread(img_path, 1); mat_gray = cv::imread(img_path, 0); //形态学闭运算 cv::Mat elementRect; elementRect = cv::getStructuringElement(cv::MORPH_RECT, cv::Size(3, 3), cv::Point(-1, -1)); cv::morphologyEx(mat_gray, mat_gray, cv::MORPH_CLOSE, elementRect); // binary cv::threshold(mat_gray, mat_binary, 125, 255.0, cv::THRESH_BINARY); // detect edge cv::Canny(mat_binary, mat_canny, 50, 125, 3); // detect line std::vector<cv::Vec4i> lines; HoughLinesP(mat_canny, lines, 1, CV_PI / 180, 80, 10, 50); // draw line for (size_t i = 0; i < lines.size(); i++) cv::Vec4i& linex = lines[i]; int dx = linex[2] - linex[0]; int dy = linex[2] - linex[1]; double angle = atan2(double(dy), dx) * 180 / CV_PI; //if (abs(angle) <= 20) // continue; line(mat_color, cv::Point(linex[0], linex[1]), cv::Point(linex[2], linex[3]), cv::Scalar(0, 0, 255), 2); cv::imshow("gray", mat_gray); cv::imshow("binary", mat_binary); cv::imshow("canny", mat_canny); cv::imshow("color", mat_color); cv::waitKey(0); return 0;输出结果:从下图可以看出,HoughLinesP函数的检测效果和HoughLines函数基本一致。
呼呼呼~~🌻🌻🌻那么霍夫直线检测的代码实战就讲到这里了,大家快去试试叭🥗🥗🥗
如若文章对你有所帮助,那就🛴🛴🛴
咻咻咻咻~~duang~~点个赞呗
以上是关于霍夫直线检测代码实战的主要内容,如果未能解决你的问题,请参考以下文章
opencv —— HoughLinesHoughLinesP 霍夫线变换(标准霍夫线变换多尺度霍夫线变换累积概率霍夫线变换)