GNSS原理及技术——卫星定位原理
Posted bobuddy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了GNSS原理及技术——卫星定位原理相关的知识,希望对你有一定的参考价值。
本篇以GPS为例介绍卫星定位原理
GPS技术原理——卫星信号
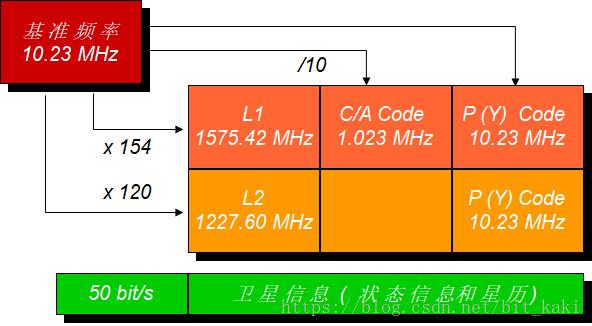
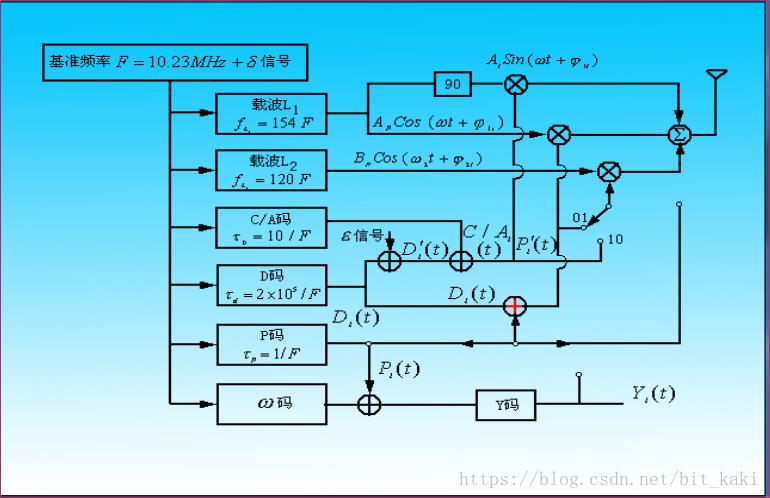
一、GPS的信号结构
每个GPS卫星播发一组信号
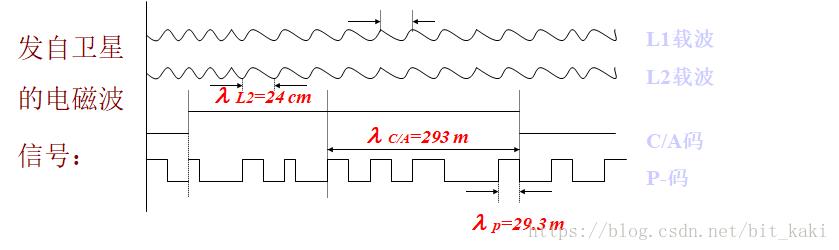
每组信号包括两个不同频率的载波信号(L1和L2)、两个不同的测距码信号(C/A码调制在L1载波上,P码或Y码同时调制在L1及L2载波上)以及卫星的轨道信息
二、C/A码(Coarse Acqusition Code)[粗码、捕捉码]
码长1023bt
周期1ms
数码率1.023Mbt/s、
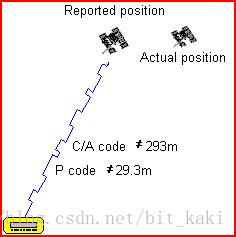
码元宽293.1m。
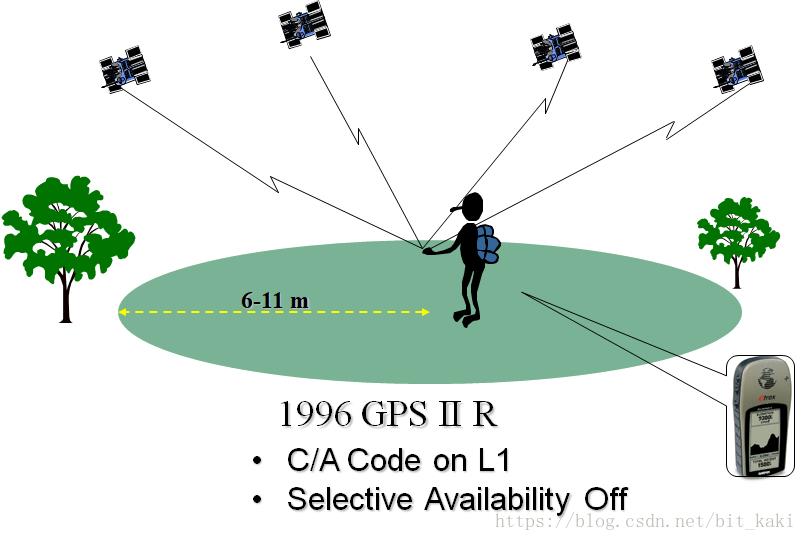
频率为 1.023 MHZ,仅在L1载波上作调变,每1023位重复一次,以 1 MHZ 的资料作调度,提供给一般民间使用。但基于国家安全的考虑,美国国防部刻意以无线电讯号干扰卫星上的原子钟,并宣告一些不准确的轨道参数来造成定位误差。这即是所谓的SA (Selective Availability)效应。
Selective Availability (选择可用性技术)
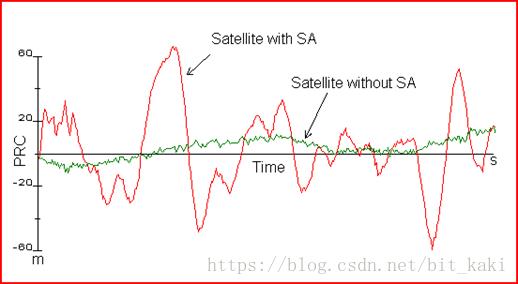
SA—选择可用性
①ε技术,使Xi、Yi、Zi有误差
② δ技术,使pi有误差
2000年5月1日,白宫宣布从午夜开始中止对GPS公众服务信号降低精度(SA政策)的措施。民用GPS精度将会提高10倍以上。
三、P码 (Precise Code) [精码 ]
码长2.35´1014比特、
周 267天(分为38部分,分配给不同卫星)、
周期1.5s
数码率10.23Mbt/s
码元宽29.3m
频率为10.23MHZ,每七天重复一次可同时采用L1及L2载波变,主要提供军事用途P码的频率大约是C/A码的10倍不但更为精确,也更不易被干扰,另外美国国防部增加了一种 A.S.码 (Anti - Spoofing),以将 P码加密之后转换成 Y码,一般用户无法译码,因此必须加装译码器,才可取得较高精度的观测量,况使用P(Y) 码必须经过相关单位的核准,因此,这种伪乱码大部份只提供军方来使用,现在美国也发展展频技术,将可防止各种讯号的干扰。
四、M码
除了IIR卫星,2005年发射了波音IIF卫星
ⅡF批次卫星除发射增强的L1、L2民用信号和M码外,将在1176.45兆赫增加第3个民用信号(L5),位于960-1215MHZ
L2载波上增加的第二个民用信号是L2C,能补偿大气传输不稳定性,提高民用导航精度到3-10米
M码采用新型的调制方法,和新一代加密技术,军用和民用码分离
GPS技术原理——GPS定位原理
一、距离测定原理
(1)C/A码测距

(2)L1/L2测距

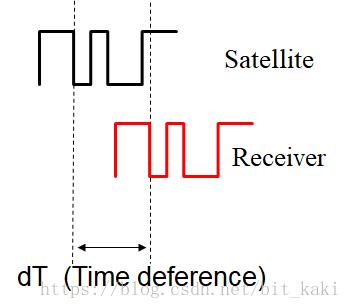
1.测距伪随机码
每一卫星播发一个伪随机测距码信号,该信号大约每1毫秒播发一次
接收仪同时复制出一个同样结构的信号并与接收到的卫星信号进行比较
由信号的延迟时间(dT)推算出卫星至接收仪的距
接收仪时钟应与卫星钟校时
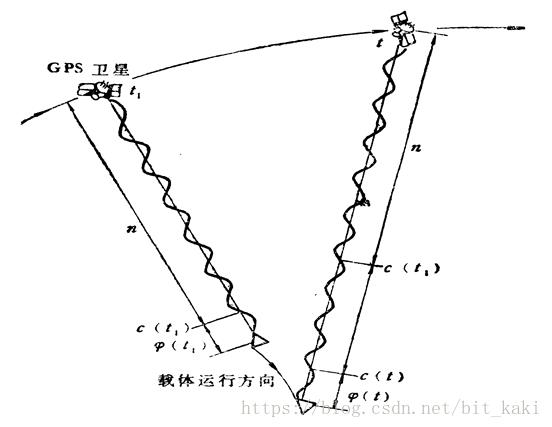
2、载波相位测距
信号量测精度优于波长的1/100
载波波长(L1=19cm, L2=24cm)比C/A码波长 (C/A=293m)短得多
所以,GPS测量采用载波相位观测值可以获得比伪距(C/A码或P码)定位高得多的成果精度
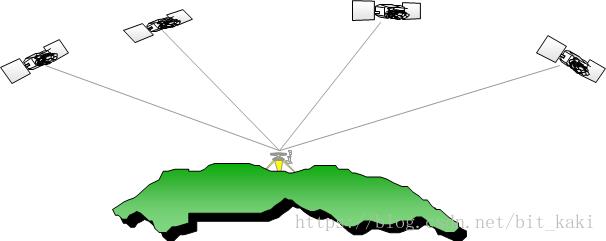
二、点位测定原理
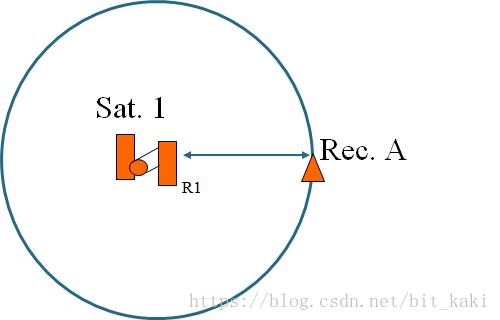
当只有一颗卫星时,我们只能确定以R1为半径的圆上的某个点 上。
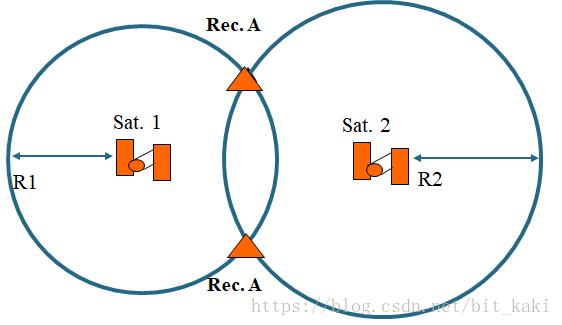
2个球面相交成一个圆弧点位被限制在一曲线上。
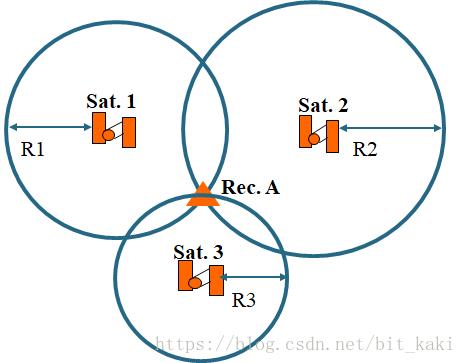
3个球面相交成一个点,3个距离段可以确定纬度、经度和高程点的空间位置被确定。
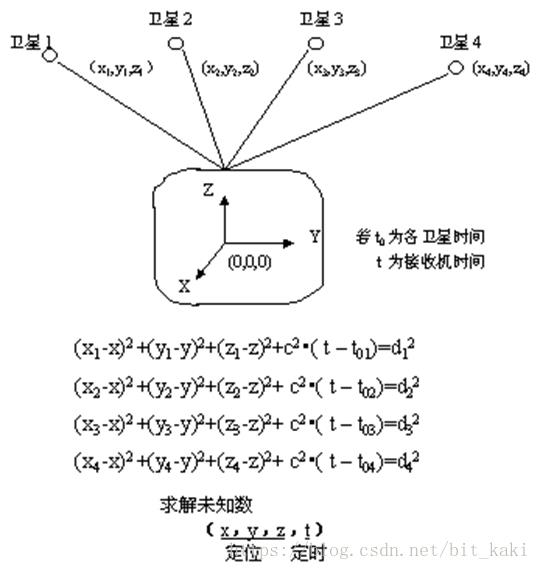
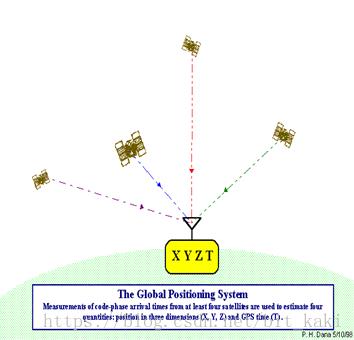
但是实际上因为卫地距离是通过信号的传播时间差Δt乘以信号的传播速度v而得到的。其中,信号的传播速度v接近于真空中的光速,量值非常大。因此,这就要求对时间差Δt进行非常准确的测定,如果稍有偏差,那么测得的卫地距离就会谬以千里。而时间差Δt是通过将卫星处测得的信号发射时间tS与接收机处测得的信号达到的时间tR求差得到的。其中,卫星上安置的原子钟,稳定度很高,我们认为这种钟的时间与GPS时吻合;接收机处的时钟是石英钟,稳定度一般,我们认为它的时钟时间与GPS时存在时间同步误差,并将这种误差作为一个待定参数。这样,对于每个地面点实际上需要求解就有4个待定参数,因此至少需要观测4颗卫星至地面点的卫地距离数据。
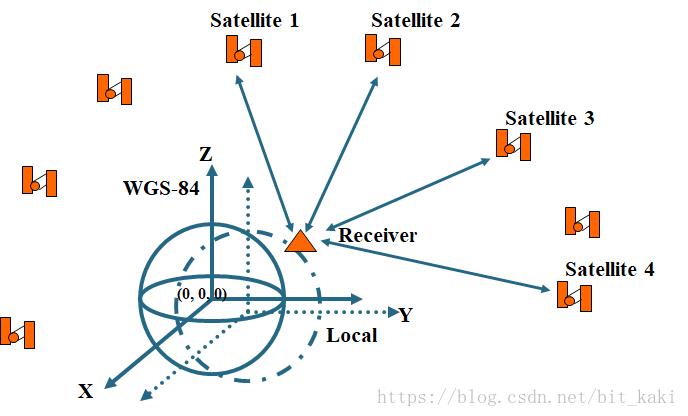
4段或更多的距离就解决了纬度,经度,高程和时间四个未知数,这就类似于测边交会问题的解决原理。
卫星不间断地发送自身的星历参数和时间信息,用户接收到这些信息后,经过计算求出接收机的三维位置,三维方向以及运动速度和时间信息。
三、 GPS定位的分类
按定位方式:单点定位,相对定位(差分定位)
按接收机的运动状态分:动态定位,静态定位
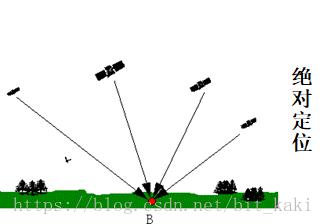
绝对定位(单点定位)
绝对位置,即某一坐标系下的绝对坐标
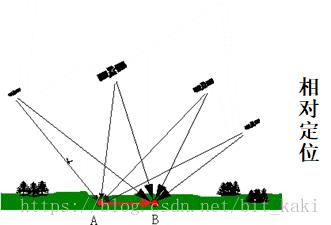
相对定位(差分定位)
基线向量,即进行同步观测的两点间的坐标差
1、绝对定位
单点定位结果的获取
单点定位解可以理解为一个后方交会问题
卫星充当轨道上运动的控制点,观测值为测站至卫星的伪距(由时延值推算得到)
由于接收机时钟与卫星钟存在同步误差
所以要同步观测4颗卫星,解算四个未知参数:经度、纬度 、高程、钟差
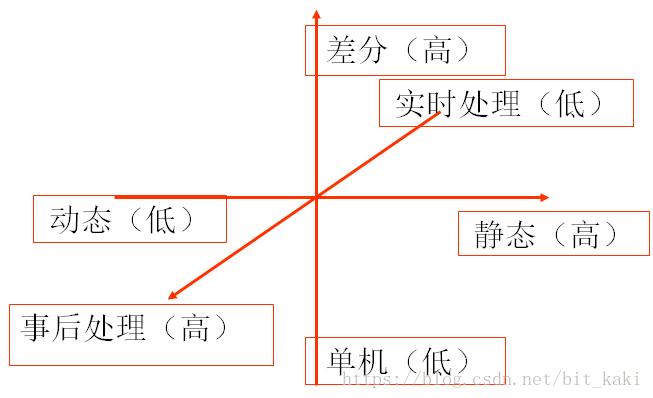
常用处理方法:
(1)事后处理—— 差分—— 静态定位
误差为(10-8 ~ 10-6 ),适合于基础控制网
(2)实时——单机 ——静态
误差为 ( ±30m/±15 m; ±10m; ±5m),适合于手持机
(3) 实时动态差分(RTD/RTK) 或后处理差分
误差为±(1~3)m/±(1~3)cm
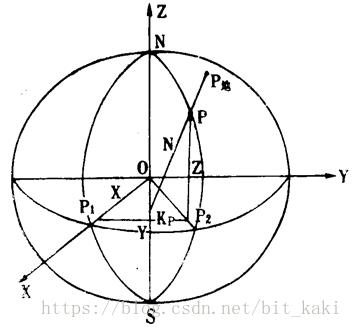
坐标系
空间大地坐标系(B,L,H);空间直角坐标系(X,Y,Z);高斯平面直角坐标系(x,y,H)。
常见坐标系
椭球体 建立时间 长半径 扁率 原点
北京54坐标系 1954年 6378245m 1/298.3 普尔科沃
1980西安坐标系 1978年 6378140±5m 1/298.2570 陕西泾阳永乐镇
2000国家大地坐标系 2008年 6378137m 1/298.25722 地球质心
WGS-84坐标系 1984年 6378137.0m 1/298.25722 地球质心
空间坐标转换
1、七参数法(空间)
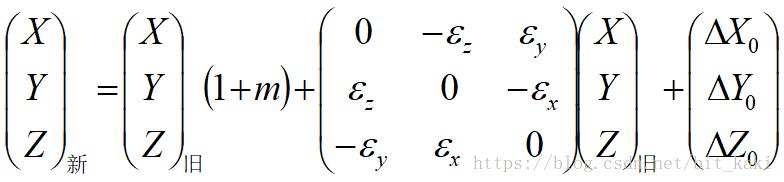
2、四参数法(平面)

以上是关于GNSS原理及技术——卫星定位原理的主要内容,如果未能解决你的问题,请参考以下文章