16_IIC编程
Posted 韦东山
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了16_IIC编程相关的知识,希望对你有一定的参考价值。
第十六章 I2C编程
I2C(Inter-Integrated Circuit BUS)是I2C BUS简称,中文为集成电路总线,是目前应用最广泛的总线之一,和IMX6ULL有些相关的是,刚好该总线是NXP前身的PHILIPS设计。当前仍然是应用最广泛的总线协议之一。
16.1 I2C协议
16.1.1 概述
I2C是一种串行通信总线,使用多主从架构,最初设计师为了让主板、嵌入式系统或手机用以连接低速周边设备而发展而来。在小数据量场合使用,有传输距离短,任意时刻只能有一个主机等特性。严格意义上讲,I2C应该是软硬件结合体,所以我们将分物理层和协议层来介绍该总线。(总线结构如下图)

对于I2C通信的过程,韦老师有个形象的说法:
传输数据,我们需要发数据,从主设备发送到从设备上去,也需要把数据从从设备传送到主设备上去,数据涉及到双向传输。
举个例子:

体育老师:可以把球发给学生,也可以把球从学生中接过来。
① 发球:
a. 老师说:注意了(start)
b. 老师对A学生说,我要球发给你(地址)。
c. 老师就把球发出去了(传输)。
d. A收到球之后,应该告诉老师一声(回应)。
e. 老师说下课(停止)
② 接球:
a. 老师说注意了(start),
b. 老师说:B把球发给我(地址)
c. B就把球发给老师(传输)
d. 老师收到球之后,给B说一声,表示收到球了(回应)。
e. 老师说下课(停止)
我们就使用这个简单的例子,来解释一下IIC的传输协议。
- 老师说注意了,表示开始信号(start)
- 老师告诉某个学生,表示发送地址(address)
- 老师发球/接球,表示数据的传输
- 老师/学生收到球,回应表示:回应信号(ACK)
- 老师说下课,表示IIC传输接受§
16.1.2 物理层
**特性1:**半双工(非全双工)
两条总线线路:
SDA(串行数据线): 主芯片通过一根SDA线既可以把数据发给从设备,也可以从SDA上读取数据,连接SDA线的引脚里面必然有两个引脚(发送引脚/接受引脚),具体可以参考下图device端I2Cn_SDA(output/input)。
**SCL(**串行时钟线):**同SDA的引脚电路结构一致,引脚的输出驱动与输入缓冲连在一起。其中输出为漏极开路的场效应管、输入缓冲为一只高输入阻抗的同相器。这样结构有如下特性:
a. 由于 SDA、SCL 为漏极开路结构,借助于外部的上拉电阻实现了信号的“线与”逻辑;
b. 引脚在输出信号的同时还将引脚上的电平进行检测,检测是否与刚才输出一致。为 “时钟同步”和“总线仲裁”提供硬件基础。
SDA和CLK连接线上连有两个上拉电阻,当总线空闲时,两根线均为高电平。连到总线上的任一器件输出的低电平,都将使总线的信号变低。(物理层连接如下图所示)

**特性2:**地址和角色可配置
每个连接到总线的器件都可以通过唯一的地址和其它器件通信,主机/从机角色和地址可配置,主机可以作为主机发送器和主机接收器。
特性3:多主机
IIC是真正的多主机总线,( IIC可以在通讯过程中,改变主机),如果两个或更多的主机同时请求总线,可以通过冲突检测和仲裁防止总线数据被破坏。
**特性4:**传输速率
传输速率在标准模式下可以达到100kb/s,快速模式下可以达到400kb/s。
**特性5:**负载和距离
节点的最大数量受限于地址空间以及总线电容决定。另外总电容也限制了实际通信距离只有几米。
16.1.2 协议层
(1)数据有效性
I2C协议的数据有效性是靠时钟来保证的,在时钟的高电平周期内,SDA线上的数据必须保持稳定。数据线仅可以在时钟SCL为低电平时改变。

(2)起始和结束条件
**起始条件:**当SCL为高电平的时候,SDA线上由高到低的跳变被定义为起始条件。
**结束条件:**当SCL为高电平的时候,SDA线上由低到高的跳变被定义为停止条件,要注意起始和终止信号都是由主机发出的,连接到I2C总线上的器件,若具有I2C总线的硬件接口,则很容易检测到起始和终止信号。

总线在起始条件之后,视为忙状态,在停止条件之后被视为空闲状态。
(3)应答
每当主机向从机发送完一个字节的数据,主机总是需要等待从机给出一个应答信号,以确认从机是否成功接收到了数据,从机应答主机所需要的时钟仍是主机提供的,应答出现在每一次主机完成8个数据位传输后紧跟着的时钟周期,低电平0表示应答,1表示非应答
(4)数据帧格式
SDA线上每个字节必须是8位长,传输几个字节每个transfer是不限制的,每个字节后面必须跟一个ACK。数据首先用最高有效位(MSB)传输。

16.2 IMX6ULL的I2C控制器操作与寄存器介绍
IMX6ULL的I2C提供了标准I2C从服务器和主服务器的功能,I2C是设计与标准的NXP I2C总线协议兼容,所以上面的通用知识完全可以应用在IMX6ULL I2C的编程和控制。
掌握IMX6ULL I2C控制器的使用,重点要熟悉IMX6ULL I2C的寄存器的操作。
重点介绍寄存器之前,我们先来看一下IMX6ULL的I2C控制器的框图,对IMX6ULL I2C的结构和特性有一个初步认识。

IMX6ULL的I2C控制器有如下额外特性:
① 多主机运行。
② 64种不同的串行时钟频率之一的软件可编程性。
③ 软件可选择的应答位。
④ 中断驱动,逐字节数据传输。
⑤ 仲裁丢失中断与自动模式切换从主到从。
⑥ 启动和停止信号生成/检测。
⑦ 重复启动信号生成。
⑧ 应答位生成和检测。
⑨ 总线忙检测。
另外的IMX6ULL 的I2C也支持两种模式:标准模式和快速模式,标准模式下I2C数据传输速率最高是100Kbits/s,在快速模式下数据传输速率最高为400Kbits/s。
通过上面的介绍对IMX6ULL的I2C控制器有了整体认识,下面结合I2C 框图对重点寄存器进行介绍。
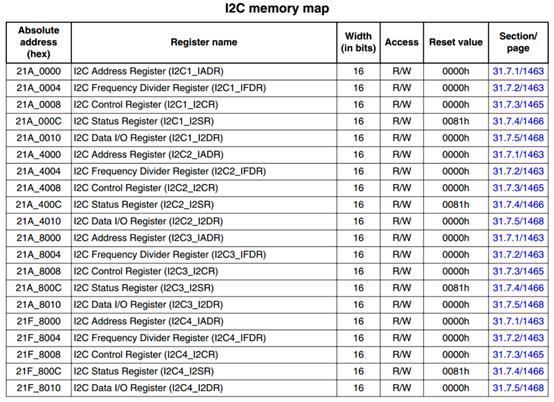
16.2.1 I2C Memory Map
I2C包含5个16-bit 的寄存器
注意:寄存器在偏移量0x0002/0x0006/0x000A/0x000E作为保留位。
可以看到I2C1的入口地址为21A_0000,这个我们重点关注,后面做实验,编程会使用到。
16.2.2 Register
我们先把这些寄存器的用途做个介绍,后面在编程框架那里会结合位图来讲解。下面这部分也可以先跳过,回头当表来查。
16.2.2.1 I2C Address Register (I2Cx_IADR)地址寄存器,偏移量为0h。
a. bit15-8为保留位即只读为0。
b. bit7-1(ADR)位是I2C作为从机时的地址。从属模式是I2C的默认模式,这个地址是作为从机的相应地址,不能被软件复位。
16.2.2.2 I2C Frequency Divider Register (I2Cx_IFDR)分频寄存器,偏移量为4h。
a. bit15-6位为保留位,即只读为0。
b. bit5-1 位为I2C时钟频率
注意:该值在传输过程中不应该改变,但是可以在之前改变。
I2C_IFDR提供了一个可编程的预分频器,用于时钟配置以进行比特率选择,寄存器不会被软件重置。
寄存器IC位设置计算方法如下:
I2C的时钟源来源于IPG_CLK_ROOT=66Mhz
PLL2 = 528 MHz
PLL2_PFD2 = 528 MHz
IPG_CLK_ROOT = (PLL2_PFD2 / ahb_podf )/ ipg_podf = (528 MHz/4)/2 = 66Mhz
PER_CLK_ROOT = IPG_CLK_ROOT/perclk_podf = 66 MHz/1 = 66 MHz
设置I2C的波特率为100K, 因此当分频值=66000000/100000=660.
参考Table 31-3. I2C_IFDR Register Field Values 中只有640对应的0x15最接近

即寄存器IFDR的IC位设置为0X15。
16.2.2.3 I2C Control Register (I2Cx_I2CR)控制寄存器,偏移量为8h
a. bit 15-8为保留位,即只读为0。
b. bit 7 为I2C使能位。(0 disable,1 enable)
c. bit 6 为I2C中断使能位。(0 disable,1 enable)
d. bit 5 为主/从模式选择位(0 slave mode,1 master mode )
e. bit 4 为传输方向模式选择位 (0 receive mode,1 transmit mode)
f. bit 3为应答使能位 (0 ACK , 1 NO ACK)
g. bit 2 重复开始信号(0 no repeat start,1 Generates repeat start)
h. bit 0 保留位
16.2.2.4 I2C Status Register (I2Cx_I2SR)状态寄存器,偏移量为Ch
a. bit 15-8为保留位即只读为0。
b. bit 7 数据传输状态位(0 传输中,1 传输完成)
c. bit 6 I2C地址是否为从标识(0 不表示,1 是从机地址)
d. bit 5 I2C总线忙状态标识位(0 空闲,1 忙 )
e. bit 4 仲裁丢失位 (0 正常,1 仲裁丢失)
f. bit 3 保留位
g. bit 2从机读写标识位 (0 slave接收,主向从写 , 1 slave发送 主向从读)
h. bit 1 I2C中断(0无中断等待, 1有中断等待)
i. bit 0 应答信号标识位(0检测到ACK, 1检测到NO ACK)
6.2.2.5 I2C Data I/O Register (I2Cx_I2DR)数据寄存器,偏移量为10h
a. bit 15-8为保留位即只读为0。
b. bit 7-1 数据字节
注意:在主接收模式下,读取数据寄存器允许发生读取并初始化下一个字节被接收。在从模式下,相同功能需要编址后生效。
低8位为有效数据位,发送数据时将数据写到这个寄存器中,如果要接收时直接读取该寄存器中的数据。
16.3 AP3216C操作方法
16.3.1 AP3216C简介
AP3216C 模块的核心就是这个芯片本身。这颗芯片集成了光强传感器(ALS: Ambient Light Sensor),接近传感器(PS: Proximity Sensor),还有一个红外LED(IR LED)。这个芯片设计的用途是给手机之类的使用,比如:返回当前环境光强以便调整屏幕亮度;用户接听电话时,将手机放置在耳边后,自动关闭屏幕避免用户误触碰。该芯片通过I2C接口作为slave与主控制器相连,支持中断。
16.3.2 AP3216C特性
① 接口:I2C
② 速率:FS mode 可达400kbit/s
③ 模式:ALS/PS+IR/ALS+PS+IR/PD/ALS once/SW Reset/PS+IR once/ALS+PS+IR once。
④ 内置温度补偿电路。
⑤ 工作温度:-30℃ to +80℃
⑥ ALS
a. (0-65536)16位有效的线性输出
b. 4量程动态范围可选择
c. 防闪烁(50/60 HZ)
d. 高敏感性@黑玻璃
e. 窗口损失补偿
⑦ PS
a. (0-1023)10位有效线性输出
b. 4增益
c. 高环境光抑制
d. 串扰补偿
⑧ 封装大小:4.1mm x 2.4mm x 1.35mm
16.3.3 AP3216C结构图
下面是AP3216C的结构图以及典型电路应用图


从图上看AP3216C结构简单,应用方便。本来模块我们其实也不用太深究原理,所以重点我们放在对典型I2C从设备的应用上。
16.3.4 AP3216C寄存器及使用
a. I2C从设备地址
从设备地址有7bit ,一个读/写位应该由主设备附加到从设备地址以正确地与设备通信。
AP3216的地址是0X1E。
b. 系统寄存器表
同其他所有从设备一样,AP3216C有它的内部寄存器让我们来设置和操作。表格如下所示。可以知道。次级地址0x00为系统配置寄存器,并且提供了后面7bit组合的工作模式供选择。
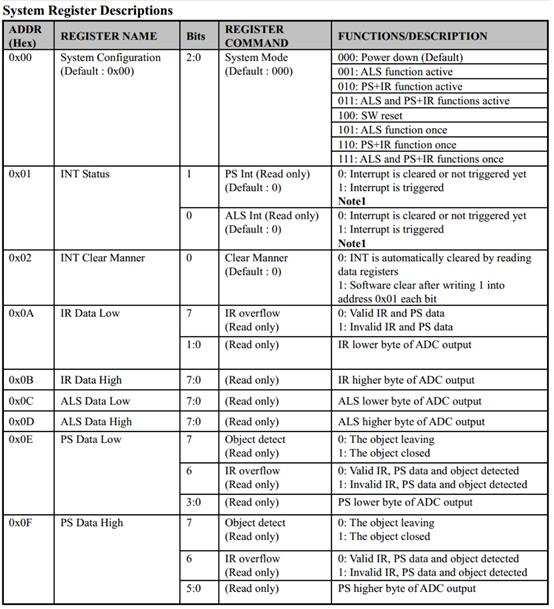
后面会参考这张表格对AP3216C进行编程并读取数据。
16.4 I2C控制器编程_框架
之前的所有铺垫都是为了实现I2C通讯,所以怎么用代码实现也是尤为关键的一个问题。本节源码目录在裸机Git仓库 NoosProgramProject/(16_I2C编程\\001_example_i2c_ap3216c_led_show\\i2c.c和
裸机Git仓库 NoosProgramProject/(16_I2C编程\\001_example_i2c_ap3216c_led_show\\i2c.h
首先,需要定义I2C寄存器的入口地址,各个寄存器绝对地址,我们代码仅使用I2C1,故仅先定义I2C1相关寄存器。
/*
*The I2C contains five 16-bit registers.
*/
/* 绝对地址 寄存器名 位宽(bit)权限 复位值 章节/页
* 21A_0000 (I2C1_IADR) 16 R/W 0000h 31.7.1/1463
* 21A_0004 (I2C1_IFDR) 16 R/W 0000h 31.7.2/1463
* 21A_0008 (I2C1_I2CR) 16 R/W 0000h 31.7.3/1465
* 21A_000C (I2C1_I2SR) 16 R/W 0081h 31.7.4/1466
* 21A_0010 (I2C1_I2DR) 16 R/W 0000h 31.7.5/1468
*/
#define I2C1_BASE_ADDR (0x21A0000u)
/* I2C1 Base address */
#define I2C1 ((I2C_REGISTERS *)I2C1_BASE_ADDR)
有了上面的地址,定义如下寄存器结构体,这样在使用时,我们仅需要把入口地址定义成如下结构,那么就可以通用I2C1-IC25,在使用时传入相应的入口地址即可。
/* 寄存器地址的宏结构体定义,此种方式仅定义入口地址即可 */
/* all registers address is Base address + xh offset*/
typedef struct tagRegisters
volatile uint16_t IADR; /*I2C Address Register, offset: 0x0 */
uint8_t ReservedIADR[2];
volatile uint16_t IFDR; /*I2C Frequency Divider Register, offset: 0x4 */
uint8_t ReservedIFDR[2];
volatile uint16_t I2CR; /*I2C Control Register, offset: 0x8 */
uint8_t ReservedI2CR[2];
volatile uint16_t I2SR; /*I2C Status Register, offset: 0xC */
uint8_t ReservedI2SR[2];
volatile uint16_t I2DR; /*I2C Data I/O Register, offset: 0x10 */
I2C_REGISTERS;
有了基本的信息,我们也要有相应的操作,主要有读和写两个操作码。
typedef enum enI2C_OPCODE
I2C_WRITE = 0, /* 主机向从机写数据 */
I2C_READ = 1, /* 主机从从机读数据 */
I2C_DONOTHING_BULL
I2C_OPCODE;
然后需要有个分配和传输承载信息角色的载体,我们仅以做master为例,如果做通用的结构体,还可以加上角色等信息。而master的主传输结构体包括目标以下信息:
typedef struct tagI2cTransfer
uint8_t ucSlaveAddress; /* 7位从机地址 */
uint32_t ulOpcode ; /* 操作码*/
uint32_t ulSubAddress; /* 目标寄存器地址 */
uint8_t ulSubAddressLen; /* 寄存器地址长度 */
volatile uint32_t ulLenth; /* 数据长度 */
uint8_t *volatile pbuf; /* 数据*/
I2C_TRANSFER;
有了这些寄存器的基本信息、操作方式、传输结构,下面来实现具体的函数和功能。
16.4.1 i2c_init
void i2c_init(I2C_REGISTERS *I2C_BASE);81 void i2c_init(I2C_REGISTERS *I2C_BASE);
通过传入I2C1的入口地址,完成初始化。
因为不使用中断服务函数模式,初始化代码非常简单,我们仅需要将I2CR(bit7)(位图如下)

置0后写入IFDR为0x15(位图如下),设置波特率为100k。(具体计算方法参考16.2 IMX6ULL的I2C控制器操作与寄存器介绍中关于分频寄存器),然后再使能I2C,将I2CR(bit7)置1 。

代码如下:
I2C_BASE->I2CR &= ~(1 << 7);
I2C_BASE->IFDR = 0x15;
I2C_BASE->I2CR |= (1<<7);
16.4.2 i2c_transfer
函数原型如下:
uint8_t i2c_transfer(I2C_REGISTERS *I2C_BASE, I2C_TRANSFER *transfer);
参数是I2C控制器入口地址以及传输结构体,作为通用公共传输函数,负责公共流程
下面是函数流程图。

清除标识位是bit-4 IAL 仲裁位,bit-1 IIF 中断标志位都置位,位图如图所示:

代码如下:
I2C_BASE->I2SR &= ~((1 << 1) | (1 << 4));
等待传输完成需要判断上面的ICF位:
while(!((I2C_BASE->I2SR >> 7) & 0X1));
16.4.3 i2c_start
start需要先判断I2C是否忙,然后设置发送模式,最后将slave地址通过数据寄存器发出去,函数声明如下:
uint8_t i2c_start(I2C_REGISTERS *I2C_BASE, uint8_t ucSlaveAddr, uint32_t ulOpcode);
首先,判断忙是上面的IBB位
if(I2C_BASE->I2SR & (1 << 5))
设置发送模式MSTA设置为1即master,MTX设置为1即发送模式,位图如下:
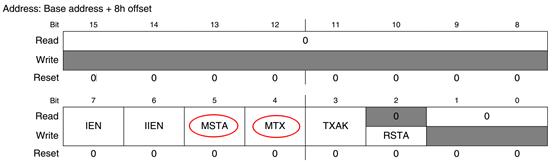
I2C_BASE->I2CR |= (1 << 5) | (1 << 4);
接下来将slave地址放到数据寄存器中发送,最后一位是操作码,位图如下:
63 I2C_BASE->I2DR = ((uint32_t)ucSlaveAddr << 1) | ((I2C_READ == ulOpcode)? 1 : 0);
16.4.4 i2c_check
check中传入的是I2SR寄存器中的值,代码如下:
uint8_t i2c_check(I2C_REGISTERS *I2C_BASE, uint32_t status);
判断仲裁位即SR寄存器bit4,如果置位,需要清除仲裁位,并重启I2C。如果没有收到从机的应答信号即SR寄存器bit0是否为1,如果没有返回状态码NAK。代码如下:
uint8_t i2c_check(I2C_REGISTERS *I2C_BASE, uint32_t status);
/* 检查是否发生仲裁丢失错误 */
if(status & (1<<4))
I2C_BASE->I2SR &= ~(1<<4); /* 清除仲裁丢失错误位 */
I2C_BASE->I2CR &= ~(1 << 7); /* 先关闭I2C */
I2C_BASE->I2CR |= (1 << 7); /* 重新打开I2C */
return I2C_ARBITRATIONLOST;
else if(status & (1 << 0)) /* 没有接收到从机的应答信号 */
return I2C_NAK; /* 返回NAK(No acknowledge) */
return I2C_OK;
16.4.5 i2c_write
写函数完成清除标志位,设置模式为发送,把buf中的数据写入I2DR数据寄存器中,等待传输完成(判断的是I2SR bit1 IIF),然后清除该位。然后检查ACK,最后再清除标识位。代码如下:
void i2c_write(I2C_REGISTERS *I2C_BASE, const uint8_t *pbuf, uint32_t len)
/* 等待传输完成 */
while(!(I2C_BASE->I2SR & (1 << 7)));
I2C_BASE->I2SR &= ~(1 << 1); /* 清除标志位 */
I2C_BASE->I2CR |= 1 << 4; /* 发送数据 */
while(len--)
I2C_BASE->I2DR = *pbuf++; /* 将buf中的数据写入到I2DR寄存器 */
while(!(I2C_BASE->I2SR & (1 << 1))); /* 等待传输完成 */
I2C_BASE->I2SR &= ~(1 << 1); /* 清除标志位 */
/* 检查ACK */
if(i2c_check(I2C_BASE, I2C_BASE->I2SR))
break;
I2C_BASE->I2SR &= ~(1 << 1);
i2c_stop(I2C_BASE); /* 发送停止信号 */
16.4.6 i2c_read
读函数具体流程如下,值得注意两个点,一个是假读是为了启动用的,有兴趣的小伙伴可以移步https://community.nxp.com/thread/378405 查看官方解释。另外如果仅需要读一个字节的话,需要发送一个NACK信号。即将I2CR bit3 TXAK置1。其他寄存器和操作我们在上面已经都讲解过。代码如下:
void i2c_read(I2C_REGISTERS *I2C_BASE, uint8_t *pbuf, uint32_t len)
volatile uint8_t dummy = 0;
dummy++; /* 防止编译报错 */
/* 等待传输完成 */
while(!(I2C_BASE->I2SR & (1 << 7)));
I2C_BASE->I2SR &= ~(1 << 1); /* 清除中断挂起位 */
I2C_BASE->I2CR &= ~((1 << 4) | (1 << 3)); /* 接收数据 */
/* 如果只接收一个字节数据的话发送NACK信号 */
if(len == 1)
I2C_BASE->I2CR |= (1 << 3);
dummy = I2C_BASE->I2DR; /* 假读 */
while(len--)
while(!(I2C_BASE->I2SR & (1 << 1))); /* 等待传输完成 */
I2C_BASE->I2SR &= ~(1 << 1); /* 清除标志位 */
if(len == 0)
i2c_stop(I2C_BASE); /* 发送停止信号 */
if(len == 1)
I2C_BASE->I2CR |= (1 << 3);
*pbuf++ = I2C_BASE->I2DR;
16.4.7 I2C读写标准流程
下面是是I2C的读写标准流程,可能实际使用时根据需求略有异同。
写寄存器的标准流程如下图:

① 1.Master发起START
② 2.Master发送I2C addr(7bit)和w操作0(1bit),等待ACK
③ 3.Slave发送ACK
④ 4.Master发送reg addr(8bit),等待ACK
⑤ Slave发送ACK
⑥ Master发送data(8bit),即要写入寄存器中的数据,等待ACK
⑦ Slave发送ACK
⑧ 第6步和第7步可以重复多次,即顺序写多个寄存器
⑨ Master发起STOP
读寄存器的标准流程如下图:

① Master发送I2C addr(7bit)和w操作1(1bit),等待ACK
② Slave发送ACK
③ Master发送reg addr(8bit),等待ACK
④ Slave发送ACK
⑤ Master发起RESTART
⑥ Master发送I2C addr(7bit)和r操作1(1bit),等待ACK
⑦ Slave发送ACK
⑧ Slave发送data(8bit),即寄存器里的值
⑨ Master发送ACK
⑩ 第8步和第9步可以重复多次,即顺序读多个寄存器
⑪ Master发送NO ACK表示读取完成,从机也不用发送ACK
⑫ Master发送STOP
1.5 I2C控制器编程_中断
I2C控制器中和中断有关的寄存器如下:
**IIEN:**I2C_I2CR(bit6)(0 disable I2C interrupt ,1 enable I2C interrupt)
**IIF:**I2C_I2SR (bit1) (0 No I2C interrupt pending ,1 An interrupt is pending)
上面分别是中断使能位,中断状态位。
编码中在传送完1byte后可以通过判断IIF状态来确认ACK和传输完成。当然作为从机时,收到自己的地址后也可以进入中断。
16.6 AP3216C编程
AP3216C的编程基于I2C初始化后,write/read功能之上。
代码路径在裸机Git仓库 NoosProgramProject/(16_I2C编程\\001_example_i2c_ap3216c_led_show\\ap3216c.c)和裸机Git仓库 NoosProgramProject/(16_I2C编程\\001_example_i2c_ap3216c_led_show\\ap3216c.h)
16.6.1 AP3216C初始化IO
参考100ASK_IMX6ULL原理图如下:
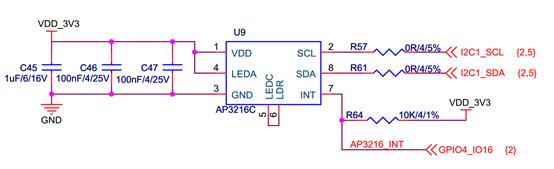
AP3216C接口简单,仅将PIN2和PIN8分别连接到I2C1_SCL和I2C1_SDA。而另外的一端从下图可知,I2C1_SCL使用的UART4_RXD,I2C1_SDA使用的UART4_TXD这两个IO。

16.6.2 初始化AP3216C
通过《1.3-1.3.4 AP3216C寄存器及使用》 的系统寄存器表格可知,0X00这个寄存器是模式控制寄存器,用来设置AP3216C的工作模式。
初始化流程如下:
① 复位(设置0X00寄存器为0X04)
② 设置工作模式(如0X03,开启ALS+PS+IR,其他模式请参考16.3中系统寄存器表格)
③ 设置中断(可选)
代码如下:
ret = i2c_write_one_byte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X4);
mdelay(10); /* AP33216C复位至少10ms */
ret = i2c_write_one_byte(AP3216C_ADDR, AP3216C_SYSTEMCONG, 0X3);
判断是否初始化成功,就读一下刚写入的data是否为0X3,代码如下:
data = i2c_read_one_byte(AP3216C_ADDR, AP3216C_SYSTEMCONG);
i2c_write_one_byte和i2c_read_one_byte就是刚才 i2c_transfer函数入参的填写过程,这里不多介绍。详细可以参考i2c.c中具体实现。
16.6.3 AP3216C数据读取
重点介绍一下下面的读数据操作,函数原型如下:
void ap3216c_read_data(uint16_t *ir, uint16_t *ps, uint16_t *als)
入参和出参很简单,分别是这三个寄存器的值。
寄存器AP3216C_IRDATALOW到AP3216C_PSDATAHIGH一共6个寄存器,将这个6个寄存器的值顺序读取,分别放到ir,ps,als变量中。
void ap3216c_read_data(uint16_t *ir, uint16_t *ps, uint16_t *als)
uint8_t buf[6];
uint8_t i;
for(i = 0; i < 6; i++) /* 循环读取所有传感器数据 */
buf[i] = i2c_read_one_byte(AP3216C_ADDR, AP3216C_IRDATALOW + i);
if(buf[0] & 0X80) /* IR_OF位为1,则数据无效 */
*ir = 0;
else /* 读取IR传感器的数据 */
*ir = ((uint16_t)buf[1] << 2) | (buf[0] & 0X03);
/* 读取ALS传感器的数据 */
*als = ((uint16_t)buf[3] << 8) | buf[2];
if(buf[4] & 0x40) /* IR_OF位为1,则数据无效*/
*ps = 0;
else /* 读取PS传感器的数据 */
*ps = ((uint16_t)(buf[5] & 0X3F) << 4) | (buf[4] & 0X0F);
return;
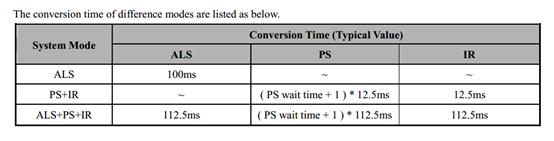
从0X0A~0X0F这6个寄存器就是数据寄存器,保存着ALS、PS和IR这三个传感器获取到的数据值。如果同时打开ALS、PS和IR的读取间隔最少要112.5ms,其他情况时间间隔,如下图所示:
16.7 AP3216C上机实验
通过下面的两个例程总结本章对于AP3216C通过I2C总线将数据发送给IMX6ULL并使用不同输出方法显示。实验程序结构如下:
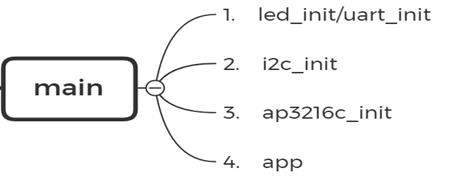
① 实验中的显示或输出设备
② 通信方式
③ 设备
④ 应用
16.7.1 AP3216C实验一
代码在裸机Git仓库 NoosProgramProject/(16_I2C编程\\001_example_i2c_ap3216c_led_show)
通过上述实验程序结构图中1-3步骤后,应用通过如下方式获取数据,并显示结果。
while(!ret)
/*环境光强度(ALS)、接近距离(PS)和红外线强度(IR)*/
ap3216c_read_data(&ir,&ps,&als);
/*调整光强和接近距离可以控制LED亮灭*/
if (als>100 || ps >1000)
led_ctl(1);
else
led_ctl(0);
16.7.2 参考章节《4-1.4编译程序》编译程序
进入 裸机Git仓库 NoosProgramProject/(16_I2C编程\\001_example_i2c_ap3216c_led_show) 源码目录进行编译。
16.7.3 参考章节《3-1.4映像文件烧写、运行》烧写、运行程序
初始化成功后会绿灯闪烁一下后关闭,LED用来判断ALS或者PS寄存器值的是否超过阈值,如果超过绿灯亮起,否则常暗。
下图常暗:

下图调整板子入光或者接近传感器后绿灯亮起:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-8bHFu5S5-1642060404761)(https://cdn.jsdelivr.net/gh/DongshanPI/HomeSite-Photos@main/IMX6ULL-BareMetal/I2C_Program_image0026.png)]
16.7.4 AP3216C实验二
代码在裸机Git仓库 NoosProgramProject/(16_I2C编程\\002_example_i2c_ap3216c_printf_show)
通过上述实验程序结构图中1-3步骤后,应用通过如下方式获取数据,并显示结果。
while(1)
delay(100000);
/*环境光强度(ALS)、接近距离(PS)和红外线强度(IR)*/
ap3216c_read_data(&ir,&ps,&als);
printf("ir=%d ps=%d als=%d\\n\\r"