利用棋盘格重新校正摄像头,求取Apriltag取向
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了利用棋盘格重新校正摄像头,求取Apriltag取向相关的知识,希望对你有一定的参考价值。
简 介: 利用Apriltag提取过程中的单应矩阵(homography)可以获得单个Apriltag的角度。通过上述测试可以看到对于Apriltag的法向量基本与镜头夹角不大的情况下,测量角度比较准确。一旦当Apriltag的法向量与镜头夹角增大到一定程度,求出的法向量的夹角会出现较大的误差。
关键词: Apriltag,单应矩阵
§00 背 景
在 旋转Apriltag角度检测 中测试Apriltag定位立方体使用的是 旋转的Apriltag码 制作贴有Apriltag的立方体。在测试过程中发现
- Apriltag张贴的时候应该是方向保持向上一致;
- 需要更加精确对于摄像头的内参和外参进行校正;
下面工作:
- 制作更大的立方体制作Apriltag的定位立方体;
- 使用更大的棋盘格进行视野校正。
§01 定位立方体
1.1 六面体盒子
今天(2022-01-01)收到了来自百度在 WAVE Summit 平行论坛 纪念品,其中有一个特色魔方的盒子,呈现正六边形,适合制作Apriltag定位立方体。
- 立方盒的边长为:73mm。

▲ 图1.1.1 特色魔方包装盒
1.2 打印Apriltag码
在 APRILTAG 标准图片:TAG25H9 下载TAG25H9 ID=1图标。
▲ 图1.2.1 TAG25H9 id=1 Apriltag 图标
根据 竞赛规则对于定位Apriltag尺寸参数 要求,Apriltag的边长应该为立方体的0.9倍。所以打印的Apriltag的边长应该为: 73 × 0.9 ≈ 66 m m 73 \\times 0.9 \\approx 66mm 73×0.9≈66mm。
{kind=link}
根据A4纸的边长为210mm,可以得到对应的编辑图片尺寸。
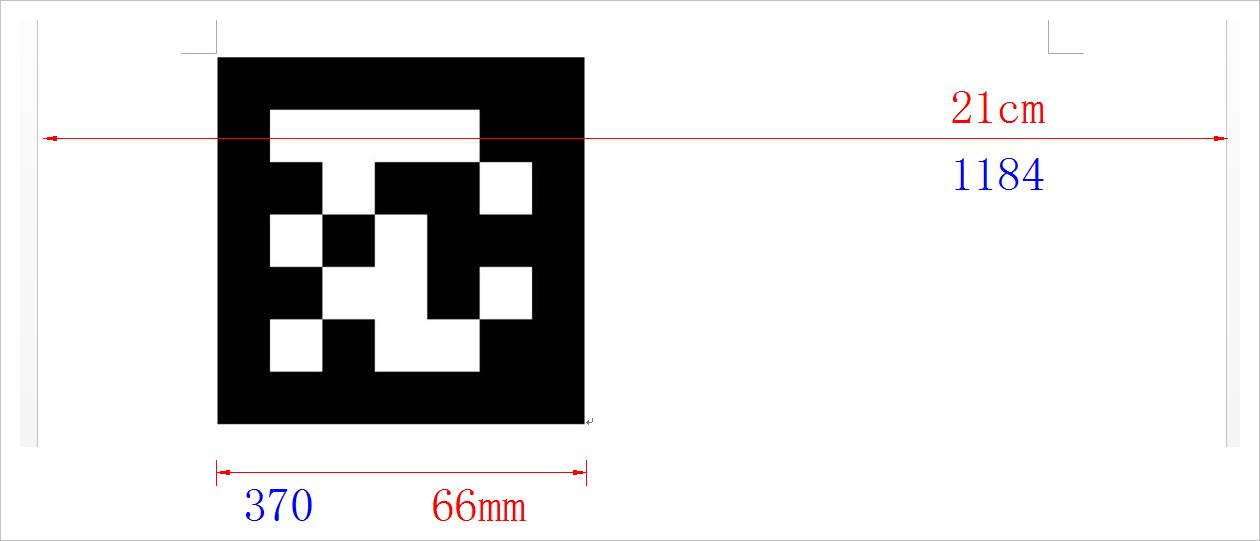
▲ 图1.2.2 编辑打印出编程为66mm的Apriltag
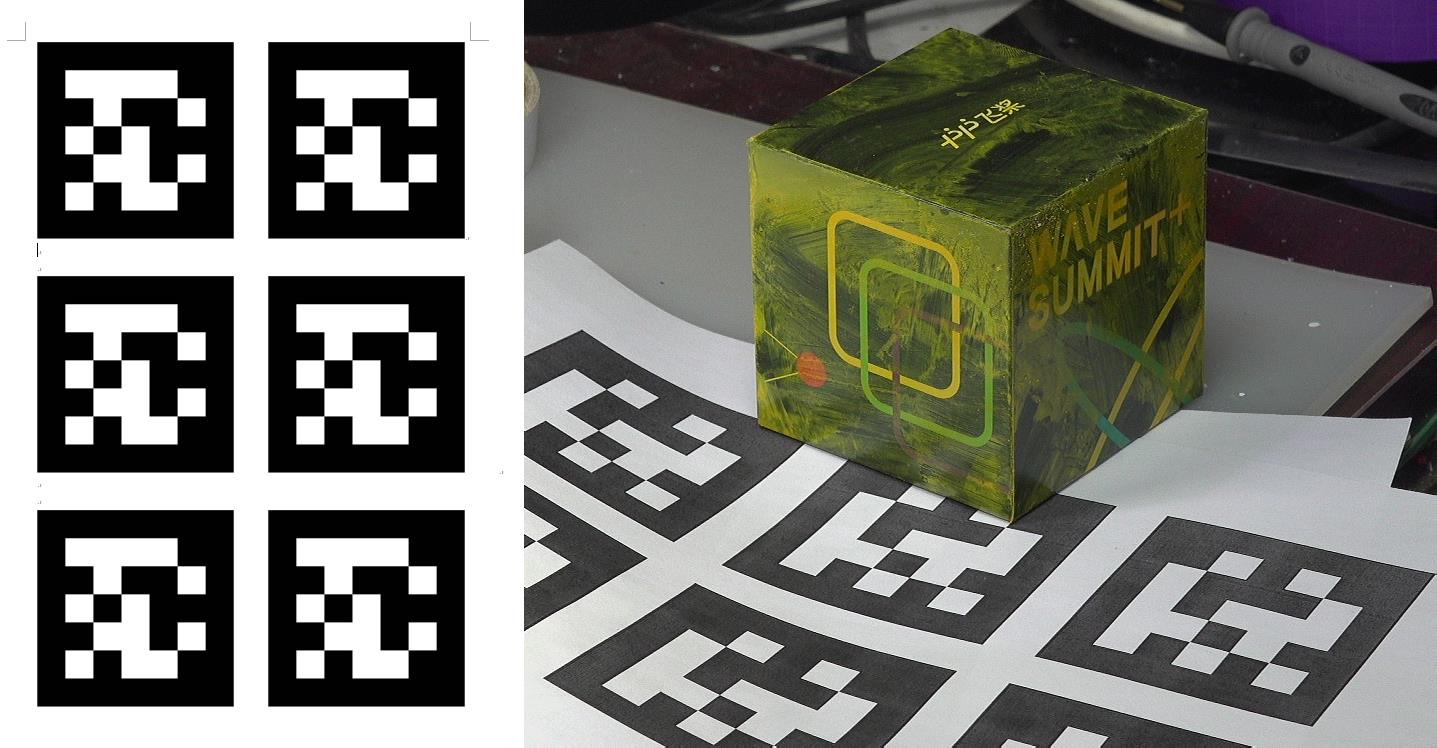
▲ 图1.2.3 打印之后的Apriltag码
1.3 粘贴制作定位立方体
使用胶水棒将打印的Apriltag码粘接在立方体盒子上。旁边还有一个粘贴在圆柱体上的Apriltag码,用于测试识别问题。

▲ 图1.2.4 粘贴好的Apriltag的定位立方体
§02 摄像机校正
2.1 拍摄棋盘格
棋盘格是 棋盘格氧化铝标定板漫反射不反光12×9方格视觉光学校正板 。手边有两种棋盘格:
-
GP100参数:
-
角点矩阵:11×8
方格边长:6mm
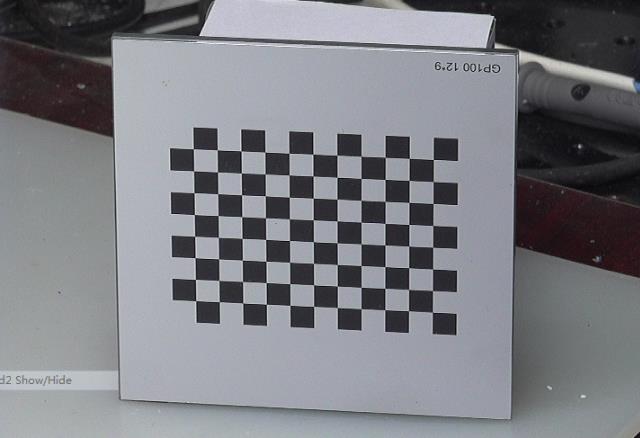
▲ 图2.1.1 GP100定标棋盘格
-
GP070参数:
-
角点点阵:11×8
方格边长:5mm
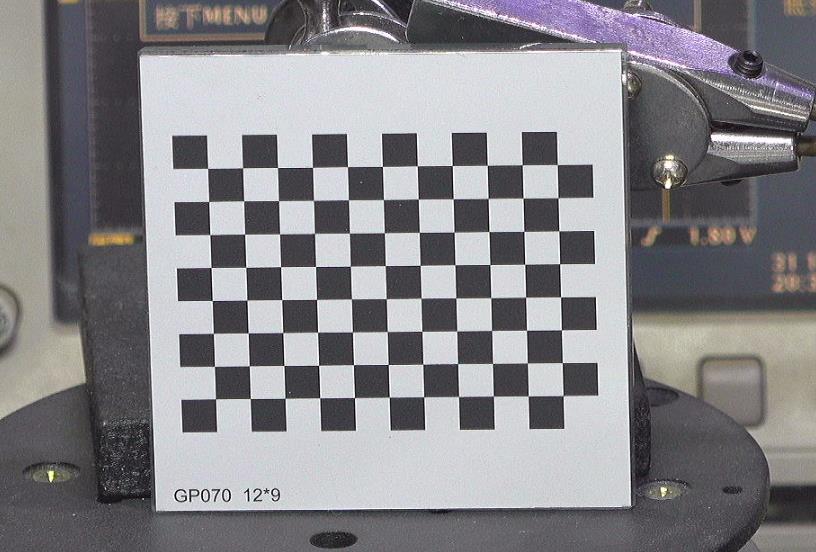
▲ 图2.1.3 GP070定标棋盘格
2.2 矫正程序
from headm import * # =
import cv2
cbfile1 = '/home/aistudio/work/GP100.jpg'
cbfile2 = '/home/aistudio/work/chessb1.jpg'
CORNER_NUM = (11,8)
def calcam(cbfile, gridsize=5):
img = cv2.imread(cbfile)
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, corners = cv2.findChessboardCorners(gray, CORNER_NUM, None)
if ret:
cv2.drawChessboardCorners(img, CORNER_NUM, corners, ret)
plt.clf()
plt.figure(figsize=(12,12))
plt.axis("off")
plt.imshow(img)
obj_p = zeros((CORNER_NUM[0] * CORNER_NUM[1], 3), float32)
obj_p[:,:2] = (mgrid[0:CORNER_NUM[0], 0:CORNER_NUM[1]].T.reshape(-1,2))*gridsize
obj_points = []
obj_points.append(obj_p)
img_points = []
img_points.append(corners)
ret,mtx,dist,rvecs,tvecs = cv2.calibrateCamera(obj_points, img_points, CORNER_NUM, None, None)
return ret,mtx,dist,rvecs,tvecs
ret,mtx,dist,rvecs,tvecs = calcam(cbfile1,6)
printt(ret:,mtx\\,dist:,rvecs\\,tvecs)
2.3 摄像头
存在两个摄像头,分别拍摄了上述两个棋盘格校正图片。因此下面在进行校正的时候,所得到的校正参数可能不同。
2.3.1 摄像头1校正

▲ 图2.3.1 GP100角点提取
ret: 0.12002146401949448
mtx:
[[5.94399097e+03 0.00000000e+00 6.82760115e+00]
[0.00000000e+00 6.36697742e+03 9.10752915e-01]
[0.00000000e+00 0.00000000e+00 1.00000000e+00]]
dist: [[ -1.13942937 11.40997843 0.0427266 0.06904507 -33.65814797]]
rvecs:
[array([[-0.18694408],
[ 0.7794577 ],
[-3.03463076]])]
[array([[ 108.09875682],
[ 78.08952974],
[1372.04963641]])]
2.3.2 摄像头2校正
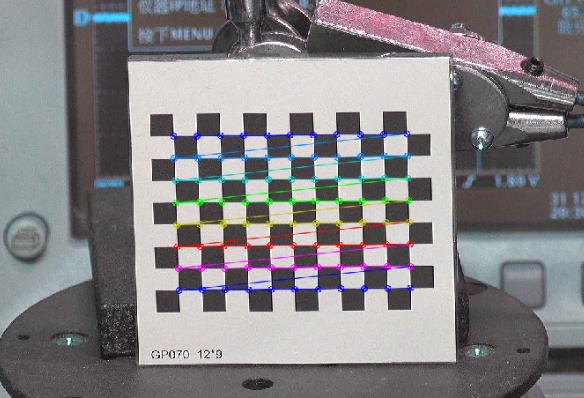
▲ 图2.3.2 GP070角点提取
ret: 0.16806419784453866
mtx:
[[ 1.82831585e+04 0.00000000e+00 1.44044114e+02]
[ 0.00000000e+00 1.93289214e+04 -1.85425454e+01]
[ 0.00000000e+00 0.00000000e+00 1.00000000e+00]]
dist: [[-5.35721122e-01 4.45459910e+02 6.54421136e-04 -6.56847763e-03
1.52761970e+00]]
rvecs:
[array([[ 0.44598183],
[ 0.05775509],
[-0.02442412]])]
[array([[ 19.31487417],
[ 30.2872056 ],
[2350.10439739]])]
§03 旋转Apriltag
根据 旋转Apriltag角度检测 中的测试方式,测量Apriltag的角度。
3.1 测量Apriltag的角度
3.1.1 摄像头1测量序列
下面是摄像头1测量得到的旋转Apriltag序列。
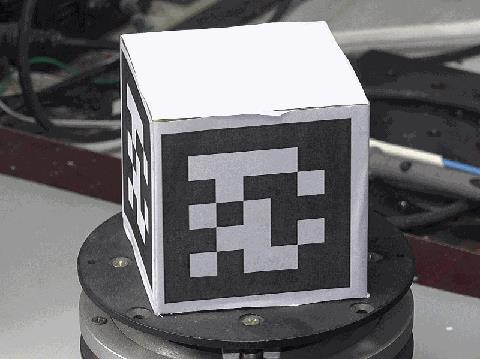
▲ 图3.1.1 摄像头1测量的旋转Apriltag序列
3.1.2 摄像头2测量序列
摄像头2拍摄的Apriltag序列:
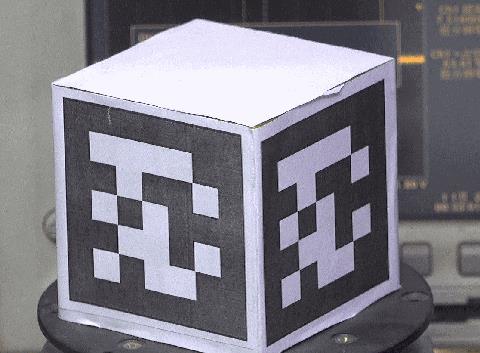
▲ 图3.1.2 摄像头2拍摄的Apriltag序列
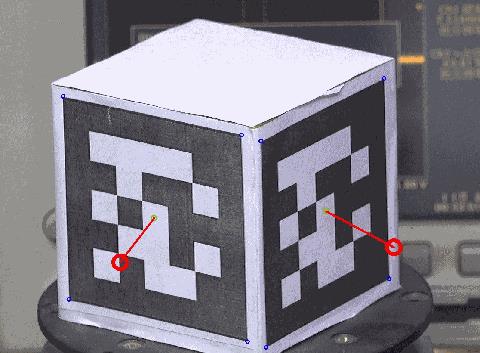
▲ 图3.1.3 动态提取Apriltag法向量
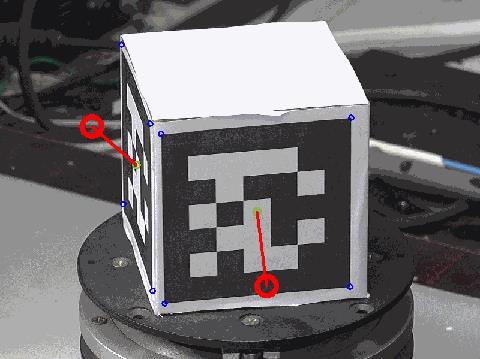
▲ 图3.1.4 Apriltag方向提取结果
※ 总 结 ※
利用Apriltag提取过程中的单应矩阵(homography)可以获得单个Apriltag的角度。通过上述测试可以看到对于Apriltag的法向量基本与镜头夹角不大的情况下,测量角度比较准确。一旦当Apriltag的法向量与镜头夹角增大到一定程度,求出的法向量的夹角会出现较大的误差。
■ 相关文献链接:
- 旋转Apriltag角度检测
- 旋转的Apriltag码
- WAVE SUMMIT平行论坛 :产教融合,人才共育
- APRILTAG 标准图片:TAG25H9
- 竞赛规则对于定位Apriltag尺寸参数
- 棋盘格氧化铝标定板漫反射不反光12*9方格视觉光学校正板
● 相关图表链接:
- 图1.1.1 特色魔方包装盒
- 图1.2.1 TAG25H9 id=1 Apriltag 图标
- 图1.2.2 编辑打印出编程为66mm的Apriltag
- 图1.2.3 打印之后的Apriltag码
- 图1.2.4 粘贴好的Apriltag的定位立方体
- 图2.1.1 GP100定标棋盘格
- 图2.1.3 GP070定标棋盘格
- 图2.3.1 GP100角点提取
- 图2.3.2 GP070角点提取
- 图3.1.1 摄像头1测量的旋转Apriltag序列
- 图3.1.2 摄像头2拍摄的Apriltag序列
- 图3.1.3 动态提取Apriltag法向量
- 图3.1.4 Apriltag方向提取结果
#!/usr/local/bin/python
# -*- coding: gbk -*-
#============================================================
# TEST1.PY -- by Dr. ZhuoQing 2021-12-31
#
# Note:
#============================================================
from headm import * # =
import cv2
import apriltag
from tqdm import tqdm
import zipfile
from scipy.spatial.transform import Rotation as R
#------------------------------------------------------------
'''
outdir = '/home/aistudio/data'
zzipfile = '/home/aistudio/data/data123271/rap1.zip'
aprdir = os.path.join(outdir, os.path.basename(zzipfile).split('.')[0])
if not os.path.isdir(aprdir):
printf('Open file '.format(aprdir))
with zipfile.ZipFile(zzipfile) as f:
f.extractall(outdir)
printf('Extract all.')
'''
#------------------------------------------------------------
#aprdir = '/home/aistudio/data/220101155505'
aprdir = '/home/aistudio/data/data123271/220101160051'
filedim = [s for s in sorted(os.listdir(aprdir)) if s.find('JPG') > 0]
#printt(filedim:)
#------------------------------------------------------------
'''
mtx = array(
[[5.94399097e+03,0.00000000e+00,6.82760115e+00],
[0.00000000e+00,6.36697742e+03,9.10752915e-01],
[0.00000000e+00,0.00000000e+00,1.00000000e+00]]
)
'''
mtx = array(
[[1.82831585e+04,0.00000000e+00,1.44044114e+02],
[0.00000000e+00,1.93289214e+04,-1.85425454e+01],
[0.00000000e+00,0.00000000e+00,1.00000000e+00]]
)
#------------------------------------------------------------
gifpath = '/home/aistudio/GIF'
gifdim = os.listdir(gifpath)
for f in gifdim:
fn = os.path.join(gifpath, f)
if os.path.isfile(fn):
os.remove(fn)
atd = apriltag.Detector(apriltag.DetectorOptions(families='tag25h9'))
for id以上是关于利用棋盘格重新校正摄像头,求取Apriltag取向的主要内容,如果未能解决你的问题,请参考以下文章