自动驾驶技术详解 持续更新ing — 激光雷达原理及应用
Posted Coisini_景尧
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶技术详解 持续更新ing — 激光雷达原理及应用相关的知识,希望对你有一定的参考价值。
一、激光雷达的概念
- 定义:
- 是一种工作在光学波段(特殊波段)的雷达,以激光作为载体(载波),以光电探测器为接收器件,以光学望远镜为天线。
- 优势:
- 分辨率高
- 工作与光学波段,频率比微波高2-3个数量级以上,所以与微波雷达相比,激光雷达具有很好的距离分辨率,角度分辨率和速度分辨率。
- 方向性好
- 激光雷达波长短,可以发射发散角非常小的激光束
- 获取的信息量丰富
- 可以直接获取目标的距离,角度,反射强度,速度等,且能生成目标环境的多维度图像。
- 可全天时工作
- 激光雷达为主动探测,不依赖于外界光照条件或目标本身的辐射性。
- 分辨率高
- 不足:
- 大气条件以及工作环境烟尘的影响,大雨,大雪,严重雾霾性能会大打折扣。
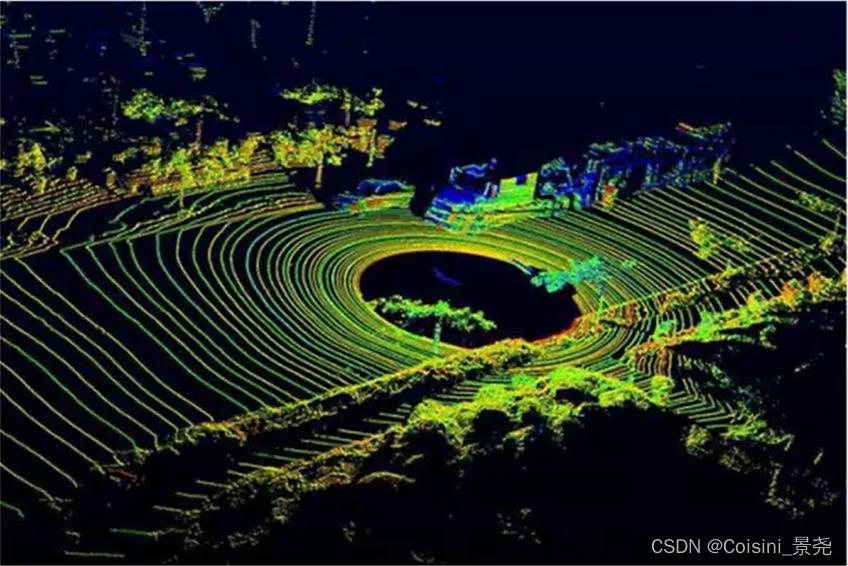
二、点云的概念***
- 定义:
- 是同一空间参考坐标系下表达目标空间分布和目标表面光谱特性的海量点集合,是激光雷达扫描数据的通用表现形式。
- 目标空间分布:通过点云信息获得目标/障碍物的空间位置信息,极坐标就是角度和距离,空间坐标,就是XYZ
- 目标表面光谱特性:不同材质反射不同,可以通过点云大致判断目标/障碍物的材质
- 海量:点云,云就是很多的意思,所以是海量点的集合
- ps:
- 距离激光雷达的远近不同,点云的疏密程度不同,因为数据的保真度随着距离而下降 ,较近的点云具有较高的分辨率
- 目标物靠的近,光的强度越强,分辨率就越高嘛,反之
- 如下图:
- 是同一空间参考坐标系下表达目标空间分布和目标表面光谱特性的海量点集合,是激光雷达扫描数据的通用表现形式。
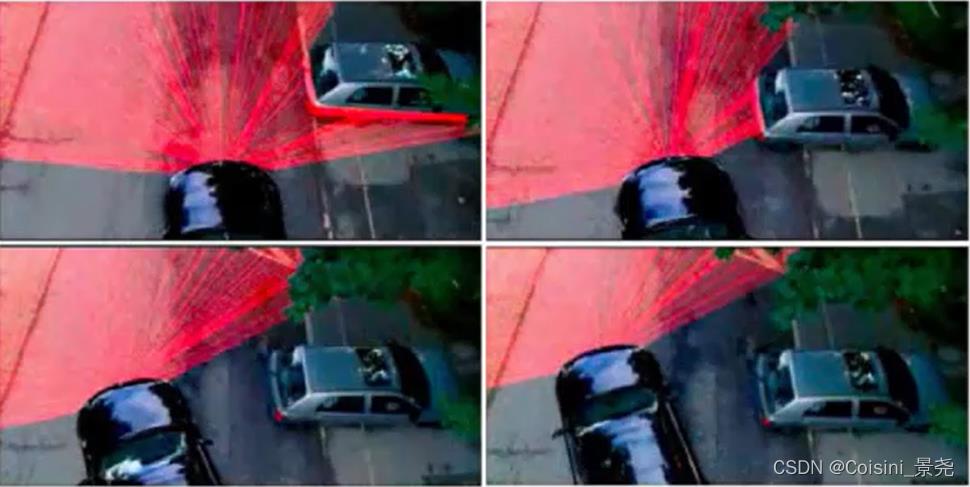
- 自动驾驶中的应用:
- 激光雷达随着汽车的行驶处于运动状态,激光雷达同时以一定的角度进行均匀的转动,整个过程中,以扫射的形式不断的发出激光并且收集反射点的信息,以便于得到全方位的环境信息。
- 因为车辆和激光雷达在运动过程中,所以激光雷达在收集反射点距离的过程中,会同时记录下该点发生的时间和水平角度,并且每个激光发射器都有编号和固定的垂直角度,根据这些数据,就可以计算出所有反射点的坐标,激光雷达每旋转一周,也就是单位采样时间。所收集到的所有反射点的坐标的集合,就构成了点云。
- 如下图:
- 如下图:
三、点云的数据处理***
-
N线点云的数据结构:
- 在驾驶过程中,每一帧的数据都会有时间戳(这个数据什么实际采集到的,会有一个时间的节点或者时间记录点),根据时间戳进行后续和时间有关的计算(距离信息的微分等)
- 如下图:

-
一线点云的数据结构:
- 一线点云数据结构是由点云的数量和每一个点云的数据结构组成。且激光雷达的数据采集频率和单线的点云数量可以设置。
- 如下图:
-
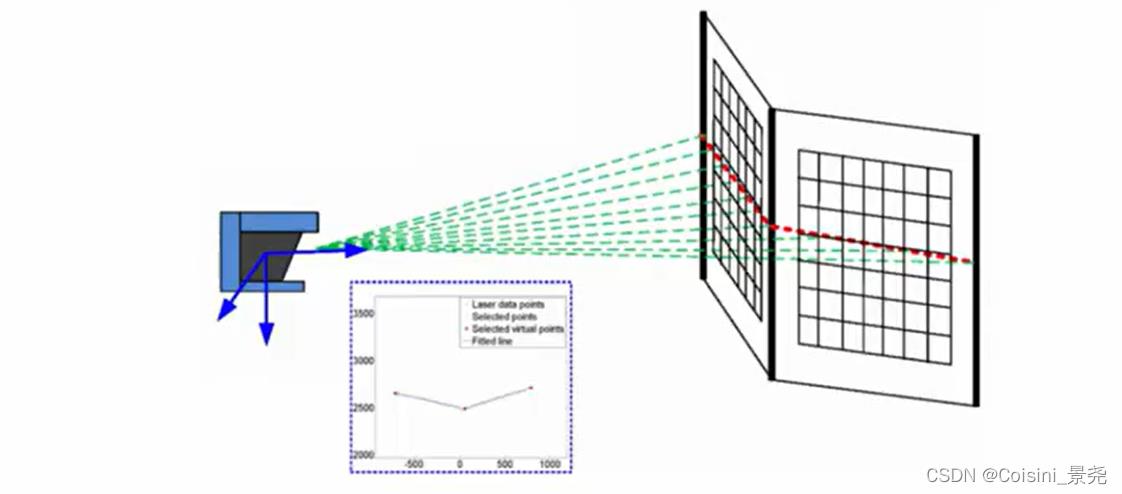
一个点云的数据结构:
- 最底层的,单个点的表达既可以用theta/r的极坐标表示,也可以用X/Y/Z三维坐标表示,以及激光的反射强度。
- 如下图:
- ps:xyz方向的偏移量是以激光雷达的安装位置为原点的。
-
点云的数据处理方式:
- 处理步骤:
- 点云数据的预处理(坐标转换,去噪声等)
- 聚类(根据点云距离或反射强度,将同一类的障碍物进行分类)
- 提取聚类后的特征
- 根据特征进行分类等后处理的工作
- 障碍物的检测与分割,如下图:
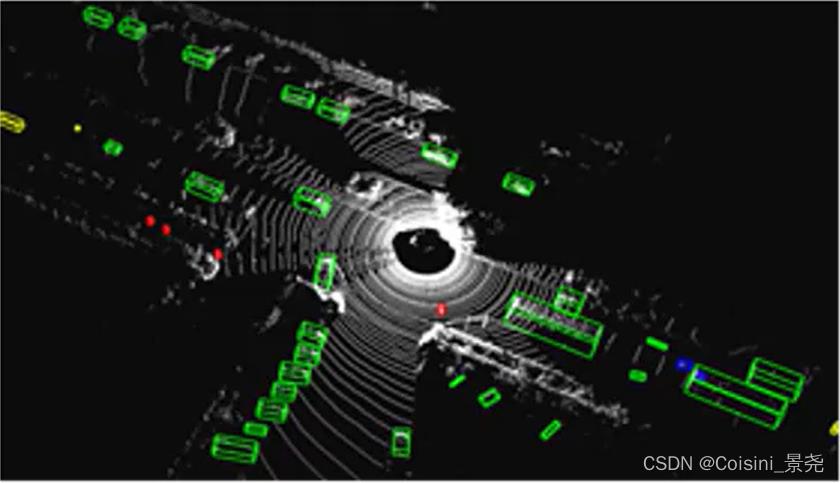
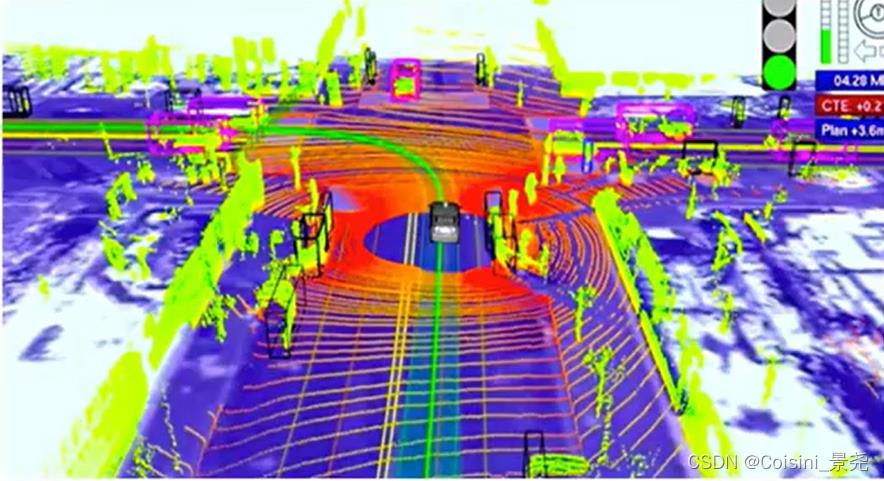
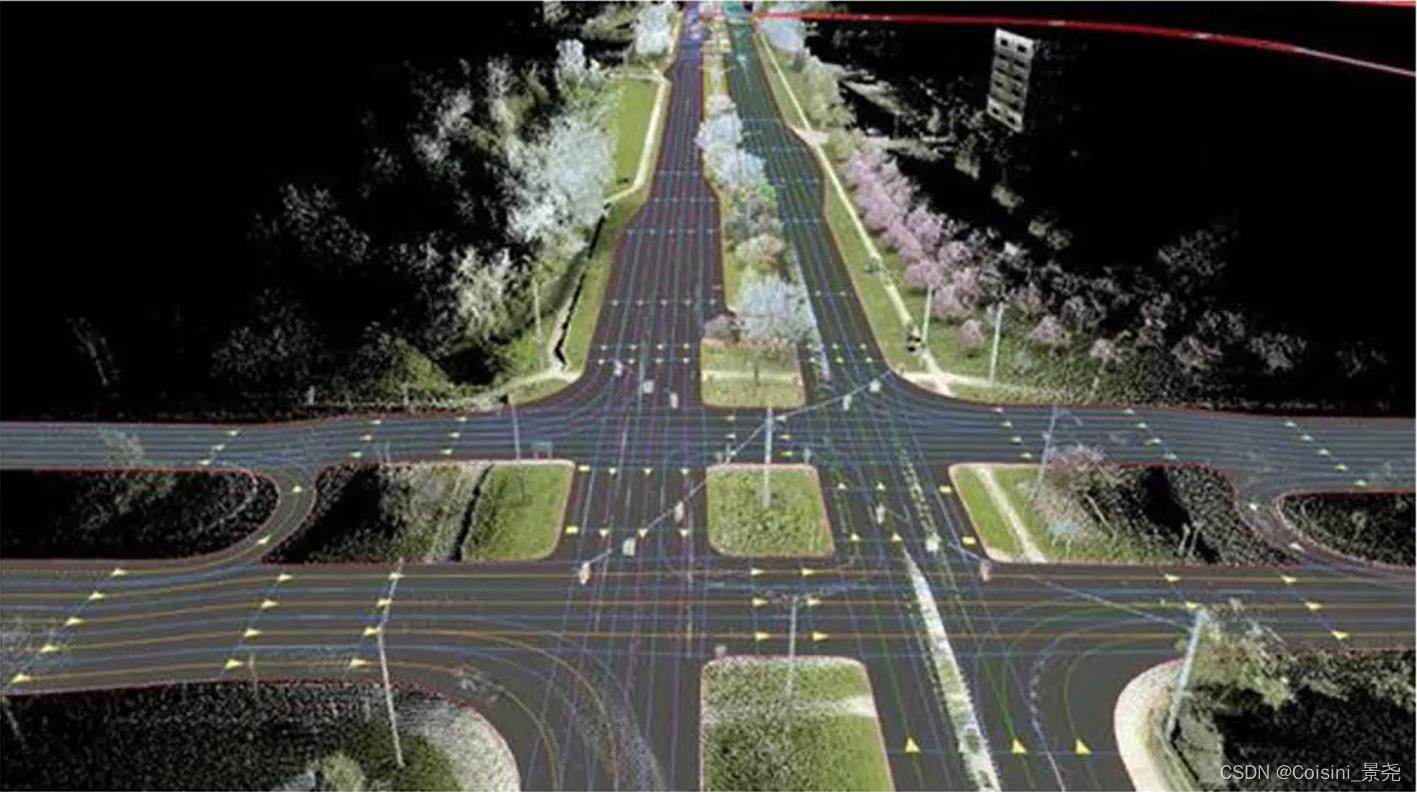
- 高精度电子地图制图和定位,如下图:
- 障碍物的检测与分割,如下图:
- 处理步骤:
四、激光雷达的组成及原理
-
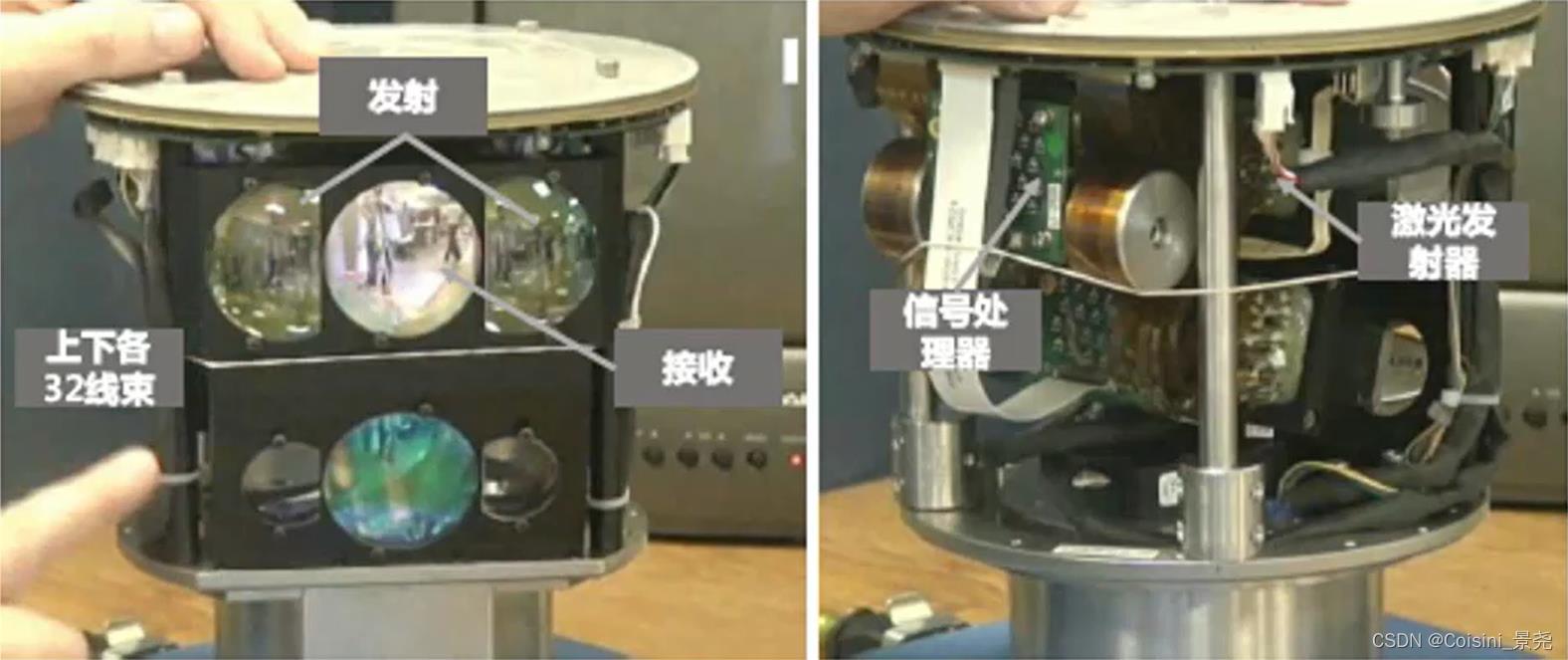
基本组成:
- 激光发射器 —— 发射波长为600nm-1000nm的激光射线
- 扫描与光学部件 —— 收集反射点距离与该点的发生时间和水平角度
- 感光部件 —— 测量返回光的强度(光强可以判断物体的材质)
- ps:激光雷达检测到的每一点都包括了空间坐标信息和光强度信息(与物体的反射度直接相关)
- 如下图:
-
测距原理:
- 根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离
- 折返时间术语:飞行时间TOF(Time of flight)
- 如下图:
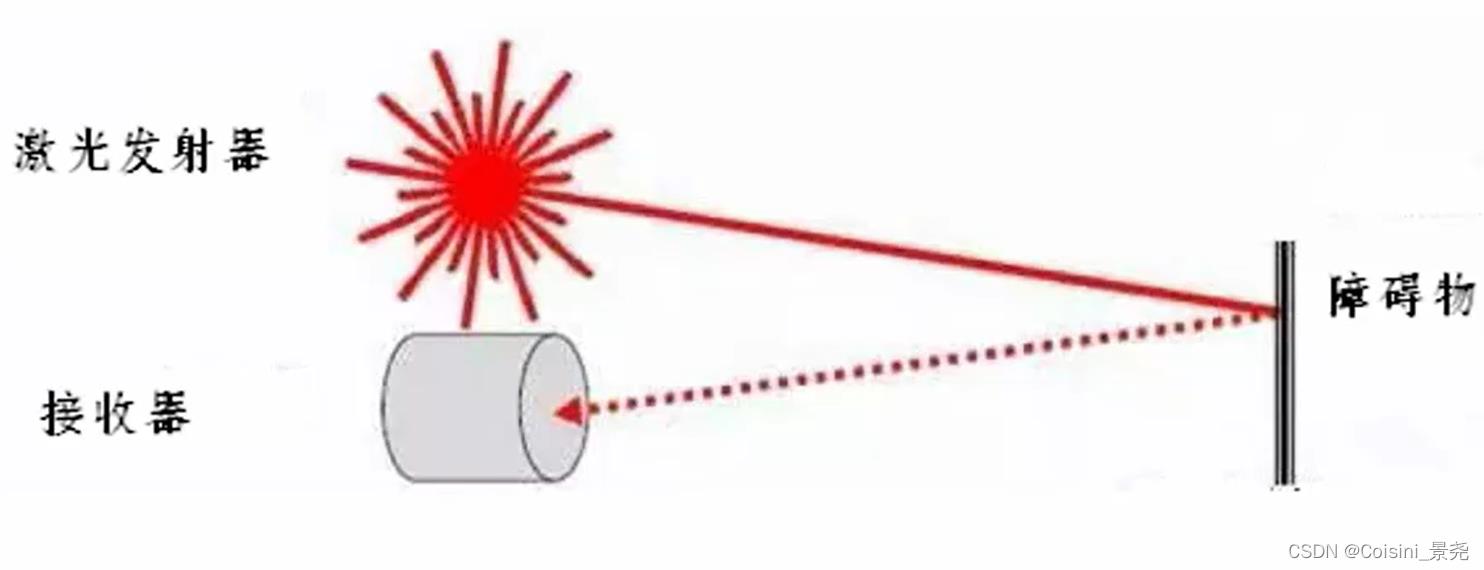
- 根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离
-
测距方法:
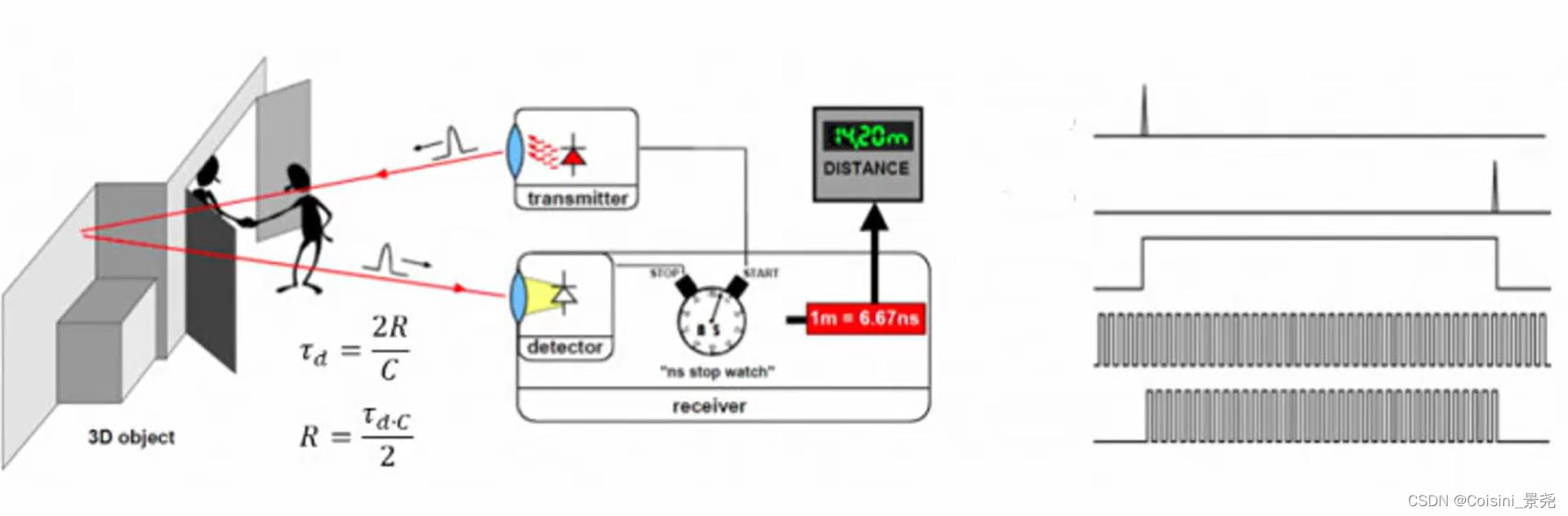
- 激光脉冲测距:通过测量激光脉冲在雷达和目标之间来回飞行时间获取目标距离的信息
- 优势:测量速度非常快,扛强光干扰能力非常强
- 不足:距离分辨率提升难度高,探测电路难度大
- 如下图:
- 激光相位测距:通过测量调制的连续波激光信号,在雷达和目标之间来回飞行产生的相位差获得距离信息
- 优势:测距的分辨率非常高(毫米级)
- 不足:测量速度比脉冲慢,实时性低(相位需要周期,测量时间会加长,速度也就降低)
- 如下图:
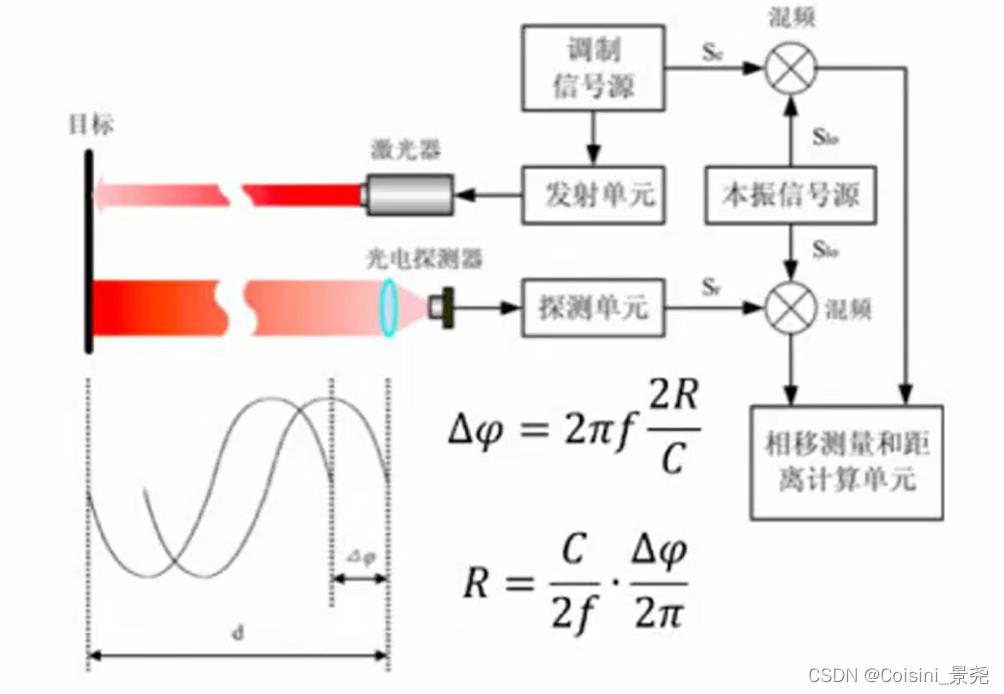
- 激光脉冲测距:通过测量激光脉冲在雷达和目标之间来回飞行时间获取目标距离的信息
-
ps:因自动驾驶技术对测距的实时性要求很高,主要是激光脉冲测距的原理
五、自动驾驶激光雷达的指标
- 测量距离
- 测量精度
- 精度要求越高,雷达的线数越多
- 精度要求越高,意味着数据处理的计算量越大
- 分辨率
- 垂直分辨率
- 水平分辨率
- ps: 角分辨率 —— 两个发射出去的激光雷达之间的距离
- 测量速率
- 如下图:
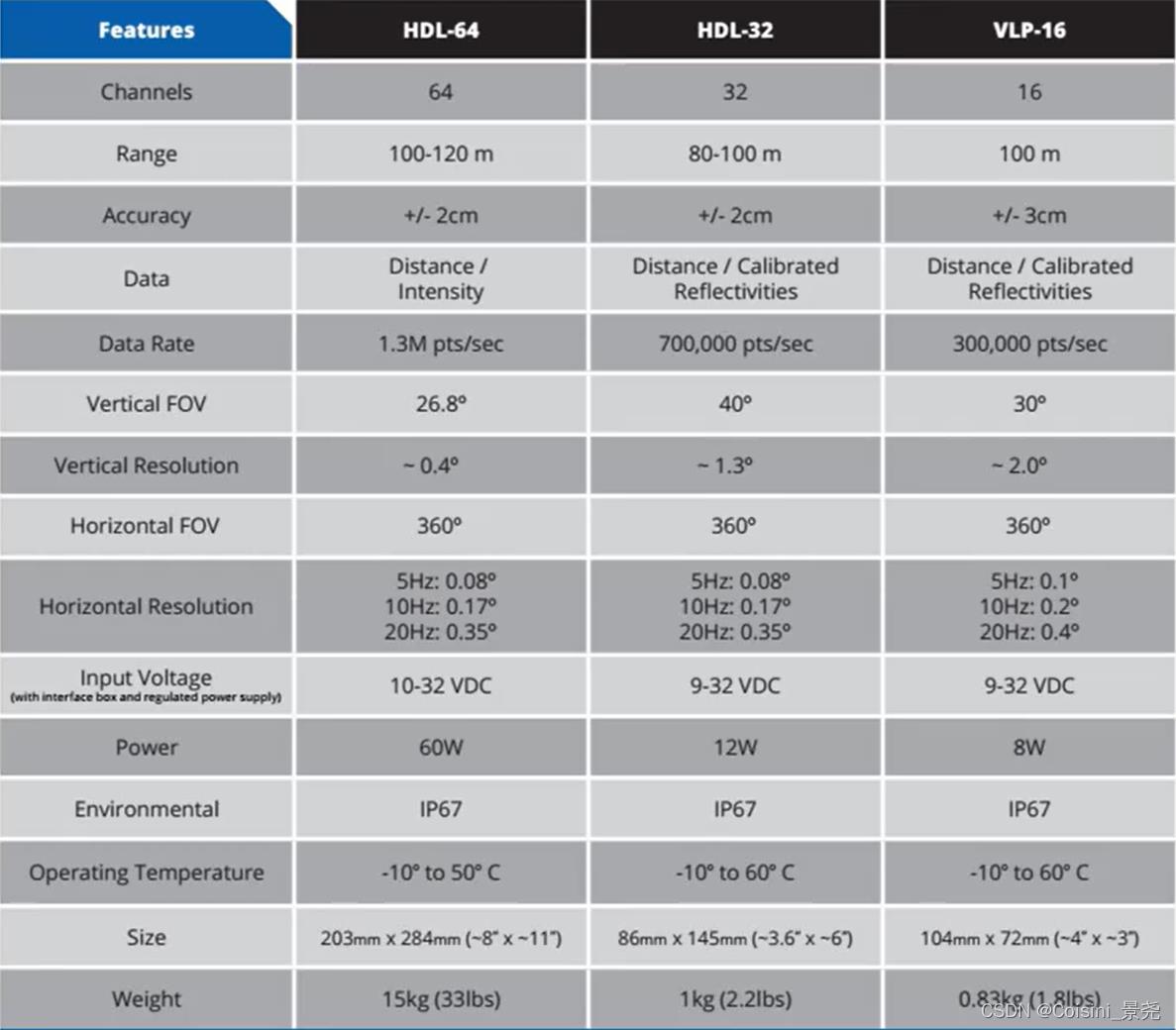
- 图示拆解:
- Channels —— 通道数(线数)
- Range —— 测距距离
- Accuracy —— 精度
- Data —— 数据
- Data Rate —— 点云(跟雷达的通道数正相关)
- Vertical FOV —— 垂直视场角
- Vertical Resolution —— 垂直分辨率
- Horizontal FOW —— 水平视场角
- Horizontal Resolution —— 水平分辨率(水平方向电机带动,频率不同,分辨率不同)
- 如下图:
六、自动驾驶中激光雷达的类型
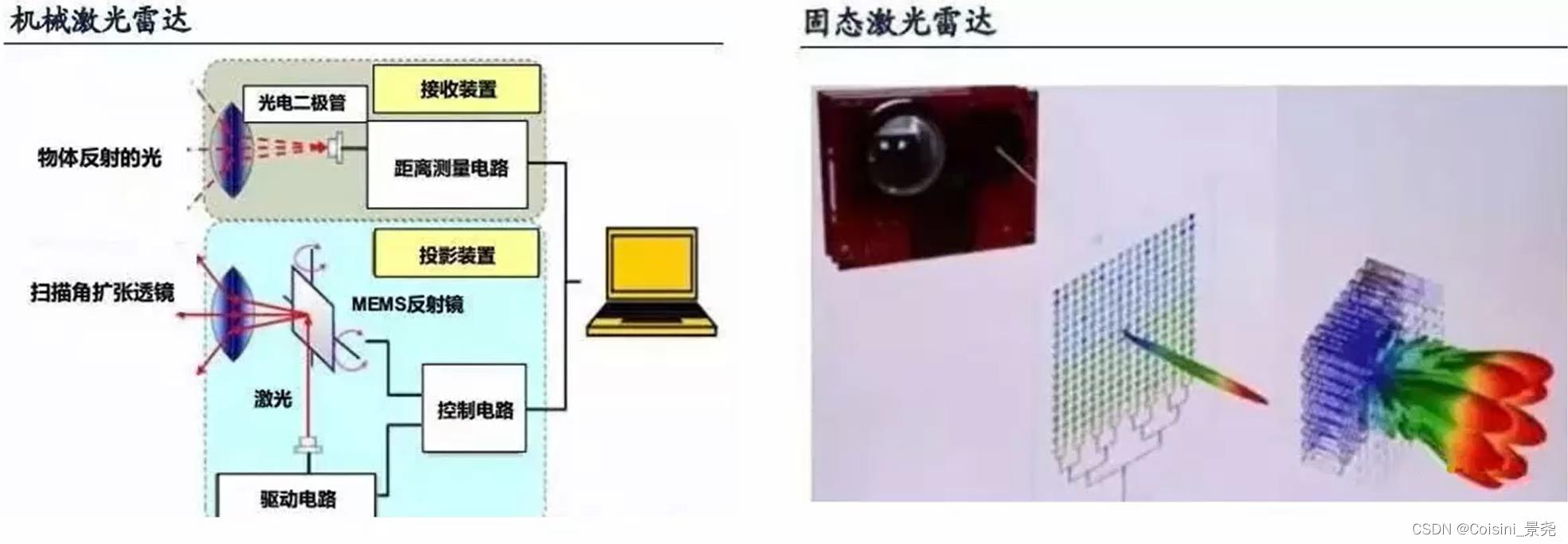
- 按照有无旋转部件分类:
- 机械激光雷达:带有控制激光发射角的旋转部件
- 固态激光雷达:依靠电子部件来控制激光发射角度,无需机械旋转部件
- 原理:通过光学相控阵列,光子集成电路以及原厂辐射方向图等电子部件代替机械旋转部件
- 优势对比:
- 固态激光雷达 —— 响应速度快,控制电压低,扫描角度大,价格低,测量精度低
- 机械激光雷达 —— 体积大,价格贵,测量精度较高
- 如下图:
- 按照线数数量分类:
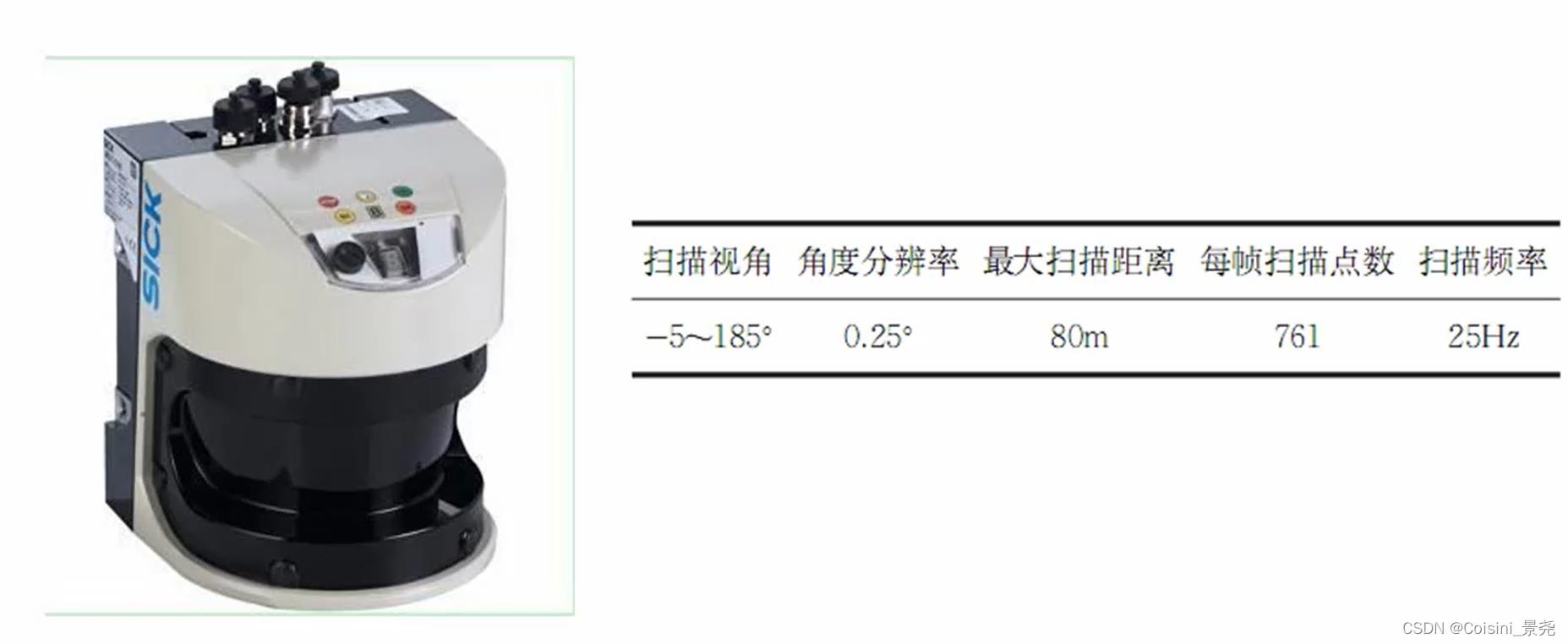
-
单线束激光雷达:
- 组成:高同频脉冲的激光测距仪 + 一维旋转扫描部件组成
- 原理:发射一条激光束,扫描某一区域,根据区域内的各点与扫描仪的相对位置返回极坐标表达的测量值,即测量物体和扫描仪扫描中心的距离和相对角度。实际应用中,会用多个单线雷达来完成地图重构。
- 特点:
- 单线激光雷达扫描仪器产生一条扫描线,获得的数据为2D数据,无法区分3D信息
- 一路发射和一路接收,结构简单,使用方便
- 扫描速度高,角度分辨率高
- 体积,重量,功耗低
- 可靠性更高
- 成本低
- 如下图:
-
多线束激光雷达:
- 扫描一次可产生多条扫描线
- 4,8,16,32,64,128线数
- 可细分为2.5D和3D激光雷达
- 区别:
- 垂直视场角的范围,2.5D ≤ 10°,3D ≥ 26°或以上
- 水平视场角基本都是360°
- 区别:
- 如下图:

-
七、激光雷达在自动驾驶技术的应用***
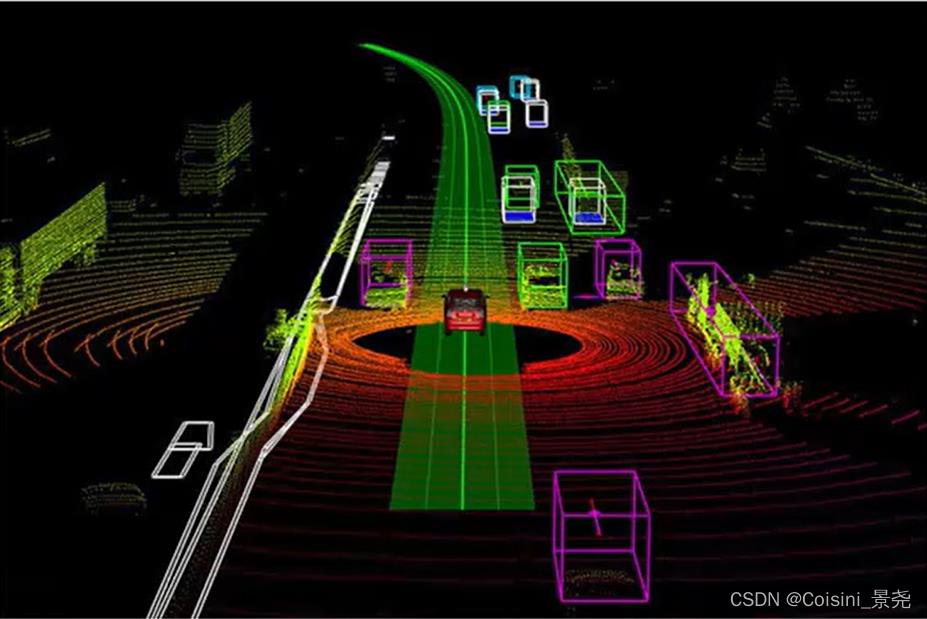
-
应用原理:
- 在自动驾驶车辆中,激光雷达通过测量时间差,位置差等确定距离,通过水平旋转扫描或者相控扫描测量角度,根据这两个数据建立二维坐标系,通过获取不同俯仰角度的信号获取第三维的高度信息。高频激光在一秒内可获得10^6 数量级以上的位置点的数据信息,然后进行三维建模,且可以通过激光信号的反射率来初步区分障碍物的材质。
- 如下图:
-
应用挑战:
- 成本高 —— 不利于量产(64线在10W+)
- 安全性 —— 激光无法编码,接收器接收到的激光是否是自车本身发出,还是恶意干扰!
- 恶劣环境适应性差 —— 大雨大雾会减弱脉冲对障碍物的探测效率
- 计算量大 —— 线数越高,点云数量越多,计算量越大

-
应用场景
- 障碍检测
- 行人检测

- 车距精准控制

- 车道线检测和路沿检测:
- 车道线检测:车道线有白色/黄色,反射强度提前确定,通过计算测试,即可分辨出,且不受白天/夜晚干扰。
- 路沿检测:可以根据生成点云的几何形状来做序列判

- 生成高精地图:
- 障碍检测
PS1:下一章会详细介绍毫米波雷达的原理和应用,由浅入深,希望能给您带来帮助
PS2:本专栏持续更新中,感谢关注,写的不对的地方,诚挚欢迎您指正,谢谢!

以上是关于自动驾驶技术详解 持续更新ing — 激光雷达原理及应用的主要内容,如果未能解决你的问题,请参考以下文章