RSSI 平面 三点定位算法(C语言JS源码例程)
Posted Love丶伊卡洛斯
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了RSSI 平面 三点定位算法(C语言JS源码例程)相关的知识,希望对你有一定的参考价值。
目录
前言
本来还想着网上找个现成的直接用。。。没想到居然转了转全是错的,有的图画着三点+三边定位第四点,代码实现的三点求三角形重心还是垂直平分线的交点来着,总之都用不了😓。不过算法本身是没有问题的,那么以下就是我根据公式自己计算出的第四点坐标。
☀️前提条件:
- 三个参考点坐标已知
- 三个参考点和第四点的距离已知
- 三个参考点连成的三角形其两边(直角三角形的直角边)不能平行于xy坐标轴
- 三个参考点连成的三角形其一边平行于xy坐标轴时,只有极少情况可以适用(具体有待数学大佬分析)
补充RSSI测距算法(下图转自:https://blog.csdn.net/u011958166/article/details/106410888):

安卓app实例
Cordova 使用 cordova-plugin-ble-central 蓝牙插件,实现蓝牙设备持续扫描,打印RSSI等信息 RSSI三点定位 demo
apk下载:码云仓库
V2.2版本效果图

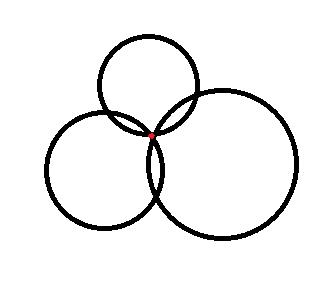
图示
理想情况,rssi算出的距离刚好三个构成的圆交于一点。
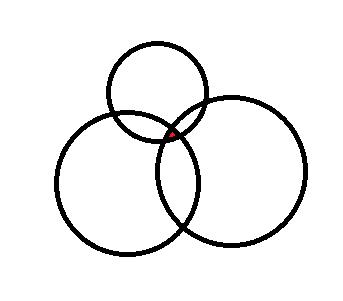
普遍情况1,三个圆交出一个范围
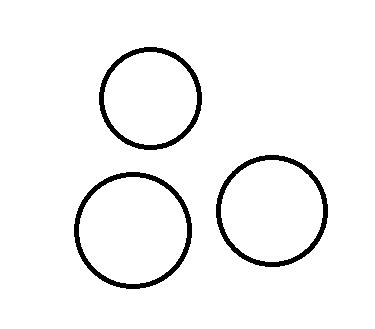
普遍情况2,三个圆不想交
普遍情况3,脚踏两条船
情况4,我套你猴子
情况5,孤立
情况6,拉手手
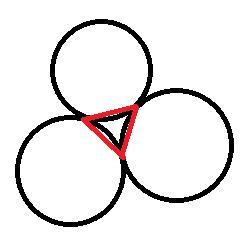
情况7,相切三角阵
情况8,三代人
情况9,箭靶
情况10,苍ying
差不多了,有空接着更
公式
图片转自:https://blog.csdn.net/Luuunatic/article/details/108100569
基于理想情况,三圆交于一点

公式推导

左右平方2

去括号

同理b也可以求出

a式-b式,去除x^2 和 y^2,得到二元一次方程式

移项得

同除以 x或y的乘项,得到 x+某y 或 某x+y


同理推出 a式-c式


再使用 (a式-b式)- (a式-c式),减掉对应的x 或 y,从而进行求解 y 或 x


再提出 x 或 y的乘项除掉

LaTEX公式:\\fracx*(xb-xa)yb-ya-\\fracx*(xc-xa)yc-ya=\\fracda^2-db^2-xa^2-ya^2+xb^2+yb^22*(yb-ya)-\\fracda^2-dc^2-xa^2-ya^2+xc^2+yc^22*(yc-ya)
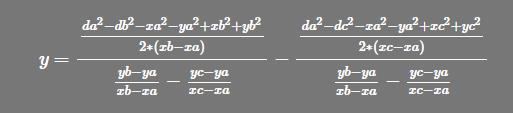
简化就不做了,因为程序实现已经到此为止了。此时我们就可以求出x和y了,再算出 (a式-b式)- (b式-c式)和 (a式-c式)- (b式-c式)的x和y,一共三组 x 和 y,代码中为temp_x[i]和temp_y[i]。
❗️❗️❗️需要注意的是除数为0的情况那么公式就不在成立,所以 三个参考点连成的三角形其两边(直角三角形的直角边)不能平行于xy坐标轴!!!
for(i = 0; i < 3; i++)
j = (i + 1) > 2 ? 2 : (i + 1);
k = k > 1 ? 0 : k;
if(x_divide_y[k] - x_divide_y[j] != 0)
temp_x[i] = (dxyy[k] - dxyy[j]) / (x_divide_y[k] - x_divide_y[j]);
temp_y[i] = (dxyx[k] - dxyx[j]) / (y_divide_x[k] - y_divide_x[j]);
else
temp_x[i] = 0;
temp_y[i] = 0;
// printf("temp_x[%d]:%lf, temp_y:%lf\\n", i, temp_x[i], temp_y[i]);
最后再对三组数据求平均得出最终结果 x 和 y。
x = (temp_x[0] + temp_x[1] + temp_x[2]) / 3;
y = (temp_y[0] + temp_y[1] + temp_y[2]) / 3;
源码
C语言
#include <stdio.h>
#include <conio.h>
#include <math.h>
int main(void)
/*
说明:参考的三点坐标及距离位置点的距离。
不适用情况:三个参考点连成的三角形其两边(直角三角形的直角边)不能平行于xy坐标轴,例如p1(0,0),p2(3,0),p3(0,4),交点(3,4)
测试数据:p1(0,0),p2(3,4),p3(6,0),交点(6,8)
*/
double ref_x[3] = 0, 3, 6;
double ref_y[3] = 0, 4, 0;
double ref_d[3] = 4, 3, 4;
// 计算出的三组 (d[i]方-d[j]方-x[i]方+y[j]方+x[j]方-y[i]方)/(2*(x[j]-x[i]))
double dxyx[3];
// 计算出的三组 (d[i]方-d[j]方-x[i]方+y[j]方+x[j]方-y[i]方)/(2*(y[j]-y[i]))
double dxyy[3];
// 计算出的三组 (x[i]-x[j])/(y[i]-y[j])
double x_divide_y[3];
// 计算出的三组 (y[i]-y[j])/(x[i]-x[j])
double y_divide_x[3];
// 计算出的三组x y坐标
double temp_x[3], temp_y[3];
// 平均x y坐标
double x = 0, y = 0;
int i = 0, j = 0, k = 0;
for(i = 0; i < 3; i++)
printf("p[%d](%lf, %lf), dis=%lf\\n", i, ref_x[i], ref_y[i], ref_d[i]);
j = (i + 1) > 2 ? 2 : (i + 1);
k = k > 1 ? 0 : k;
// printf("i=%d,j=%d,k=%d\\n", i , j , k);
// printf("numerator:%lf\\n", (ref_d[k] * ref_d[k] - ref_d[j] * ref_d[j] - ref_x[k] * ref_x[k] + ref_y[j] * ref_y[j] + ref_x[j] * ref_x[j] - ref_y[k] * ref_y[k]));
if(ref_x[j] - ref_x[k] != 0)
dxyx[i] = (ref_d[k] * ref_d[k] - ref_d[j] * ref_d[j] - ref_x[k] * ref_x[k] + ref_y[j] * ref_y[j] + ref_x[j] * ref_x[j] - ref_y[k] * ref_y[k]) / 2 /(ref_x[j] - ref_x[k]);
else
dxyx[i] = 0;
if(ref_y[j] - ref_y[k] != 0)
dxyy[i] = (ref_d[k] * ref_d[k] - ref_d[j] * ref_d[j] - ref_x[k] * ref_x[k] + ref_y[j] * ref_y[j] + ref_x[j] * ref_x[j] - ref_y[k] * ref_y[k]) / 2 /(ref_y[j] - ref_y[k]);
else
dxyy[i] = 0;
if(ref_y[j] - ref_y[k] != 0)
x_divide_y[i] = (ref_x[j] - ref_x[k]) / (ref_y[j] - ref_y[k]);
else
x_divide_y[i] = 0;
if(ref_x[j] - ref_x[k] != 0)
y_divide_x[i] = (ref_y[j] - ref_y[k]) / (ref_x[j] - ref_x[k]);
else
y_divide_x[i] = 0;
// printf("dxyx[%d]:%lf, dxyy[%d]:%lf, ", i, dxyx[i], i, dxyy[i]);
// printf("x_divide_y[%d]:%lf, y_divide_x[%d]:%lf\\n", i, x_divide_y[i], i, y_divide_x[i]);
k++;
j = 0;
k = 0;
for(i = 0; i < 3; i++)
j = (i + 1) > 2 ? 2 : (i + 1);
k = k > 1 ? 0 : k;
if(x_divide_y[k] - x_divide_y[j] != 0)
temp_x[i] = (dxyy[k] - dxyy[j]) / (x_divide_y[k] - x_divide_y[j]);
temp_y[i] = (dxyx[k] - dxyx[j]) / (y_divide_x[k] - y_divide_x[j]);
else
temp_x[i] = 0;
temp_y[i] = 0;
// printf("temp_x[%d]:%lf, temp_y[%d]:%lf\\n", i, temp_x[i], i, temp_y[i]);
x = (temp_x[0] + temp_x[1] + temp_x[2]) / 3;
y = (temp_y[0] + temp_y[1] + temp_y[2]) / 3;
printf("\\n[ x:%lf, y:%lf ]\\n", x, y);
getchar();
return 0;
javascript
// 三点定位函数,分别传入 参考点a、b、c的x、y坐标、待测点与参考点a的距离
function threePointLocation(ax, ay, ad, bx, by, bd, cx, cy, cd)
/*
说明:参考的三点坐标及距离位置点的距离。
不适用情况:三个参考点连成的三角形其两边(直角三角形的直角边)不能平行于xy坐标轴,例如p1(0,0),p2(3,0),p3(0,4),交点(3,4)
测试数据:p1(0,0),p2(3,4),p3(6,0),交点(6,8)
*/
//var ref_x = [0, 3, 6];
//var ref_y = [0, 4, 0];
//var ref_d = [4, 3, 4];
var ref_x = [];
var ref_y = [];
var ref_d = [];
// 计算出的三组 (d[i]方-d[j]方-x[i]方+y[j]方+x[j]方-y[i]方)/(2*(x[j]-x[i]))
var dxyx = [];
// 计算出的三组 (d[i]方-d[j]方-x[i]方+y[j]方+x[j]方-y[i]方)/(2*(y[j]-y[i]))
var dxyy = [];
// 计算出的三组 (x[i]-x[j])/(y[i]-y[j])
var x_divide_y = [];
// 计算出的三组 (y[i]-y[j])/(x[i]-x[j])
var y_divide_x = [];
// 计算出的三组x y坐标
var temp_x = [], temp_y = [];
// 平均x y坐标
var x = 0, y = 0;
var i = 0, j = 0, k = 0;
// 存储交点p坐标
var p = JSON.parse("\\"x\\": 0, \\"y\\": 0");
// 初始化数据
ref_x.push(ax, bx, cx);
ref_y.push(ay, by, cy);
ref_d.push(ad, bd, cd);
for(i = 0; i < 3; i++)
//console.log("p[" + i +"](" + ref_x[i] + ", " + ref_y[i] + "), dis=" + ref_d[i] + "\\n");
j = (i + 1) > 2 ? 2 : (i + 1);
k = k > 1 ? 0 : k;
//console.log("numerator:" + (ref_d[k] * ref_d[k] - ref_d[j] * ref_d[j] - ref_x[k] * ref_x[k] + ref_y[j] * ref_y[j] + ref_x[j] * ref_x[j] - ref_y[k] * ref_y[k]));
if(ref_x[j] - ref_x[k] != 0)
dxyx[i] = (ref_d[k] * ref_d[k] - ref_d[j] * ref_d[j] - ref_x[k] * ref_x[k] + ref_y[j] * ref_y[j] + ref_x[j] * ref_x[j] - ref_y[k] * ref_y[k]) / 2 /(ref_x[j] - ref_x[k]);
else
dxyx[i] = 0;
if(ref_y[j] - ref_y[k] != 0)
dxyy[i] = (ref_d[k] * ref_d[k] - ref_d[j] * ref_d[j] - ref_x[k] * ref_x[k] + ref_y[j] * ref_y[j] + ref_x[j] * ref_x[j] - ref_y[k] * ref_y[k]) / 2 /(ref_y[j] - ref_y[k]);
else
dxyy[i] = 0;
if(ref_y[j] - ref_y[k] != 0)
x_divide_y[i] = (ref_x[j] - ref_x[k]) / (ref_y[j] - ref_y[k]);
else
x_divide_y[i] = 0;
if(ref_x[j] - ref_x[k] != 0)
y_divide_x[i] = (ref_y[j] - ref_y[k]) / (ref_x[j] - ref_x[k]);
else
y_divide_x[i] = 0;
//console.log("dxyx[" + i + "]:" + dxyx[i] + ", dxyy[" + i + "]:" + dxyy[i]);
//console.log("x_divide_y[" + i + "]:" + x_divide_y[i] + ", y_divide_x[" + i + "]:" + y_divide_x[i]);
k++;
j = 0;
k = 0;
for(i = 0; i < 3; i++)
j = (i + 1) > 2 ? 2 : (i + 1);
k = k > 1 ? 0 : k;
if(x_divide_y[k] - x_divide_y[j] != 0)
temp_x[i] = (dxyy[k] - dxyy[j]) / (x_divide_y[k] - x_divide_y[j]);
temp_y[i] = (dxyx[k] - dxyx[j]) / (y_divide_x[k] - y_divide_x[j]);
else
temp_x[i] = 0;
temp_y[i] = 0;
x = (temp_x[0] + temp_x[1] + temp_x[2]) / 3;
y = (temp_y[0] + temp_y[1] + temp_y[2]) / 3;
// console.log("\\n[ x:" + x + ", y:" + y + " ]\\n");
p.x = x;
p.y = y;
return p;
测试
测试代码
#include <stdio.h>
#include <conio.h>
#include <math.h>
#include <stdlib.h>
#include <time.h>
// 三点定位
void three_point_location(double x1, double y1, double d1, double x2, double y2, double d2, double x3, double y3, double d3)
/*
说明:参考的三点坐标及距离位置点的距离。
不适用情况:三个参考点连成的三角形其两边(直角三角形的直角边)不能平行于xy坐标轴,例如p1(0,0),p2(3,0),p3(0,4),交点(3,4)
测试数据:p1(0,0),p2(3,4),p3(6,0),交点(6,8)
*/
double ref_x[3] = x1, x2, x3;
double ref_y[3] = y1, y2, y3;
double ref_d[3] = d1, d2, d3;
// 计算出的三组 (d[i]方-d[j]方-x[i]方+y[j]方+x[j]方-y[i]方)/(2*(x[j]-x[i]))
double dxyx[3];
// 计算出的三组 (d[i]方-d[j]方-x[i]方+y[j]方+x[j]方-y[i]方)/(2*(y[j]-y[i]))
double dxyy[3];
// 计算出的三组 (x[i]-x[j])/(y[i]-y[j])
double x_divide_y[3]以上是关于RSSI 平面 三点定位算法(C语言JS源码例程)的主要内容,如果未能解决你的问题,请参考以下文章