[PDDL人工智能] 02.PDDL规划领域定义语言之语法理解和示例详解
Posted Eastmount
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[PDDL人工智能] 02.PDDL规划领域定义语言之语法理解和示例详解相关的知识,希望对你有一定的参考价值。
智能规划来源于人工智能对理性行为研究,针对一个具体行为的实施目的,开展动作规划以模拟或指导行为的实施,是AI开展研究的关键问题。本文主要介绍PDDL规划领域定义语言的基础语法知识和示例详解,希望文章对您有所帮助。
该系列文章主要介绍PDDL人工智能知识,由于自己也是初学者,所以欢迎大家批评指正,一起加油喔~
文章目录
前文赏析:
一.PDDL简介
PDDL:Planning Domain Definition Language
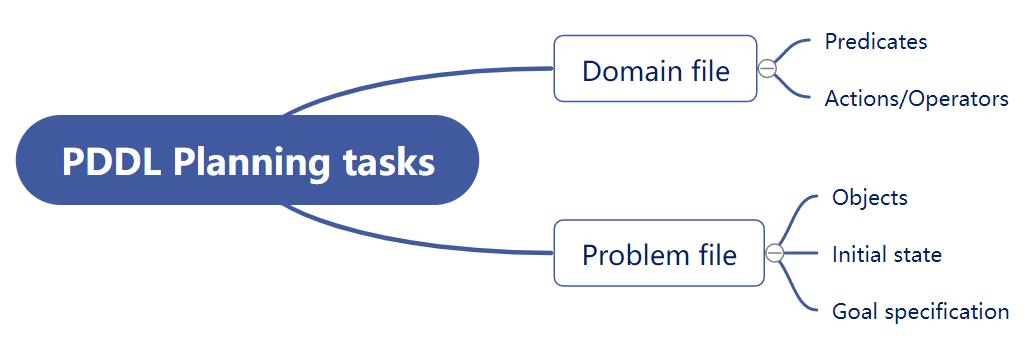
规划领域定义语言,是一种解决人工智能规划问题的比较前沿的方法。PDDL常用于解决智能规划问题,例如机器人将一个屋子的球搬运到另一间屋子里,通过合理的组织流程建造一间房子等。PDDL的规划任务(planning task)由五部分组成。
- Objects(对象)
Things in the world that interest us. - Predicates(谓词)
Properties of objects that we are interested in; can be true or false. - Initial state(初始状态)
The state of the world that we start in. - Goal specification(目标规范)
Things that we want to be true. - Actions/Operators(操作/运算符)
Ways of changing the state of the world.
定义规划任务的三要素:
- 状态
- 动作:动作是规划问题的一个关键部分
- 目标
PDDL指定的规划任务分为两个文件,domain 文件和 problem 文件。
- A domain file(域文件) for predicates and actions.
- A problem file(问题文件) for objects, initial state and goal specification.
Domain Files
域文件定义如下:
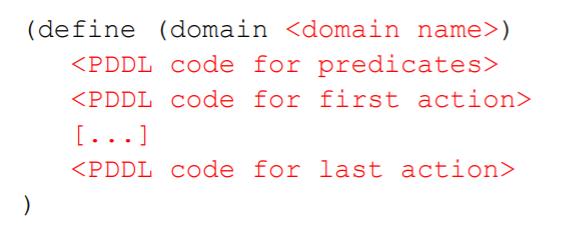
(define (domain <domain name>)
<PDDL code for predicates>
<PDDL code for first action>
[...]
<PDDL code for last action>
)
- <域名>:domain name,是标识规划域的字符串,例如gripper,后续gripper.pddl会详细介绍。
Problem Files
问题文件定义如下:
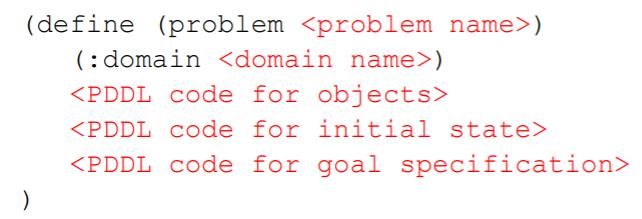
(define (problem <problem name>)
(:domain <domain name>)
<PDDL code for objects>
<PDDL code for initial state>
<PDDL code for goal specification>
)
- <问题名称>:problem name,是一个标识计划任务的字符串,例如gripper-four-balls。
- <域名>:domain name,必须与对应域名文件中的域名匹配,详见gripper-four.pddl文件。
推荐下列参考资料:
二.PDDL基础语法知识
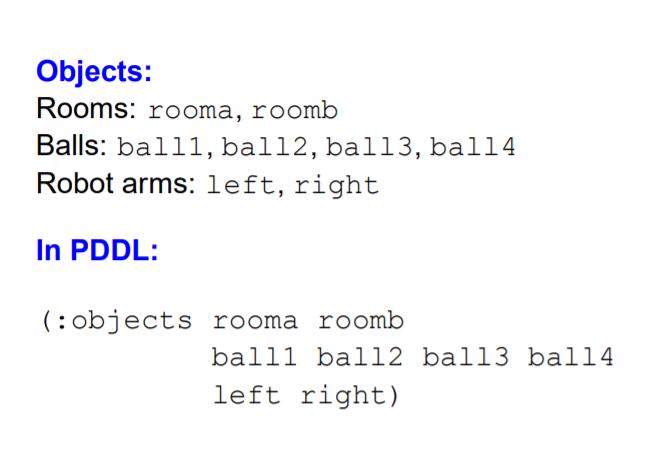
四个球移动的任务(Gripper task with four balls):假设有一个机器人可以在两个房间之间移动,并用两条手臂中的任何一条捡起或扔掉球。 最初,所有球和机器人都在第一个房间,我们希望移动球到第二个房间中。
- 对象: 两个房间、四个球和两个机械臂。
Objects:The two rooms, four balls and two robot arms. - 谓词:x是一个房间? x是球? 球x在房间y内?机械臂x是空的吗?
Predicates:Is x a room? Is x a ball? Is ball x inside room y? Is robot arm x empty? […] - 初始状态:所有球和机器人都在第一个房间, 所有机器人手臂都是空的。
Initial state:All balls and the robot are in the first room. All robot arms are empty. […] - 目标说明:所有球必须在第二个房间。
Goal specification:All balls must be in the second room. - 动作/操作:机器人可以在房间之间移动、捡球或丢球。
Actions/Operators:The robot can move between rooms, pick up a ball or drop a ball.
接下来简单给出基本定义,由于其英语直译非常明确,这里仅给出描述,下一篇文章再进行详细的语法介绍。
Gripper task: Objects
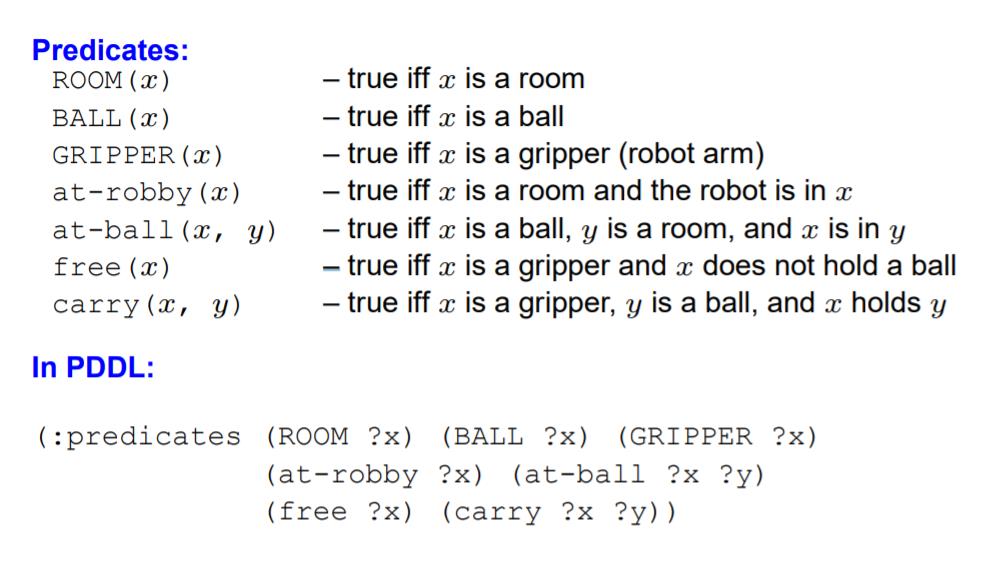
Gripper task: Predicates
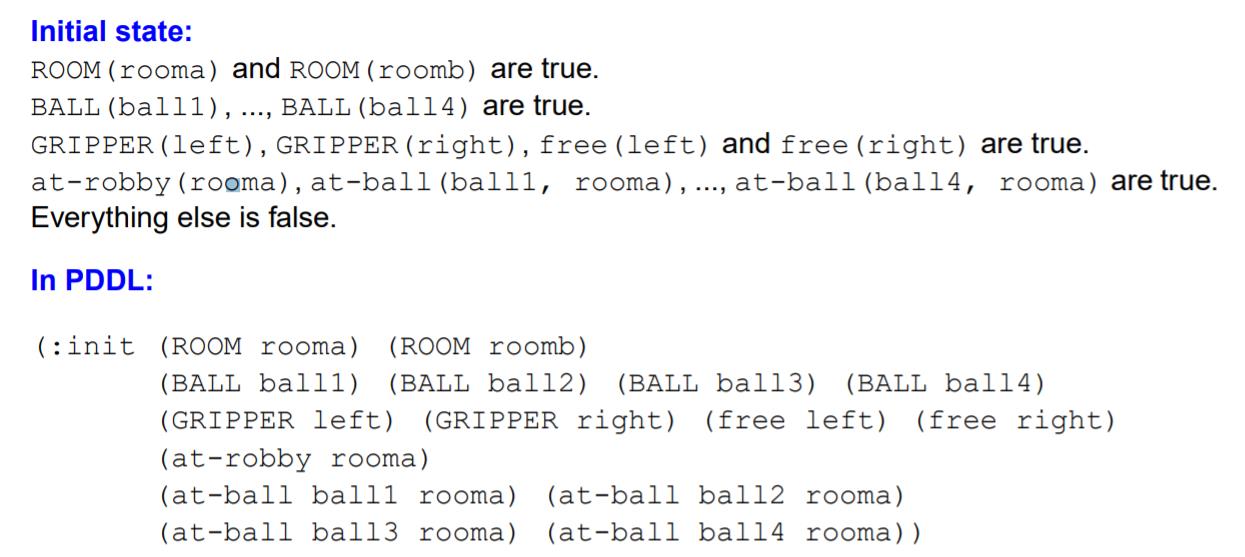
Gripper task: Initial state
- 初始状态四个球都在房间rooma中
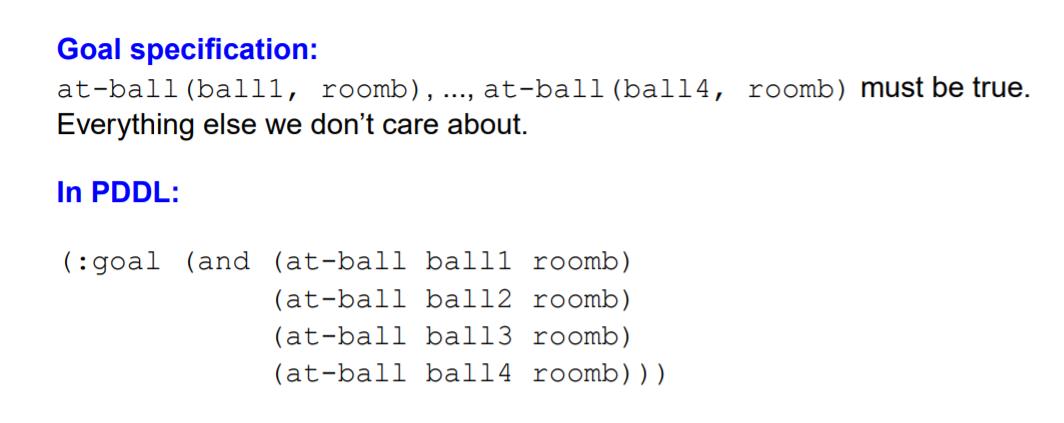
Gripper task: Goal specification
- 目标:将四个球移动到roomb中
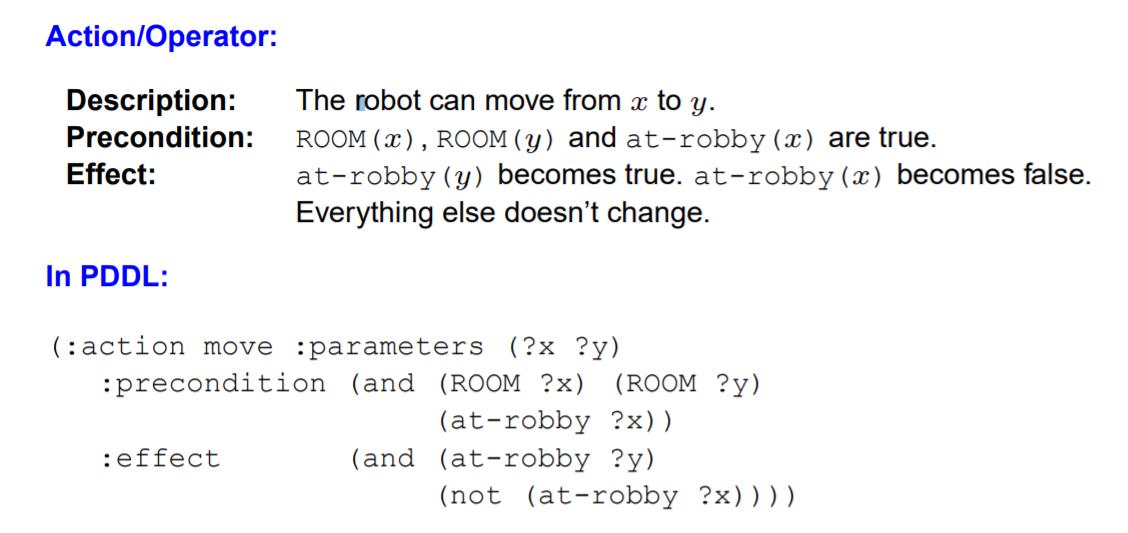
Gripper task: Movement operator
- 移动操作:机器人从x移动到y
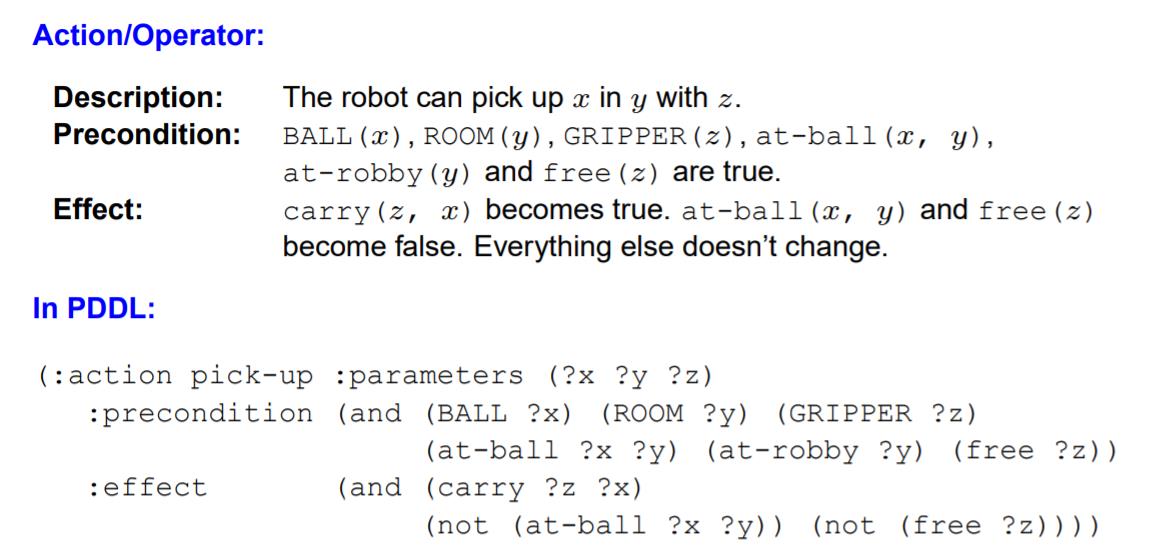
Gripper task: Pick-up operator
- pick-up操作:机器人使用z从y中捡起x
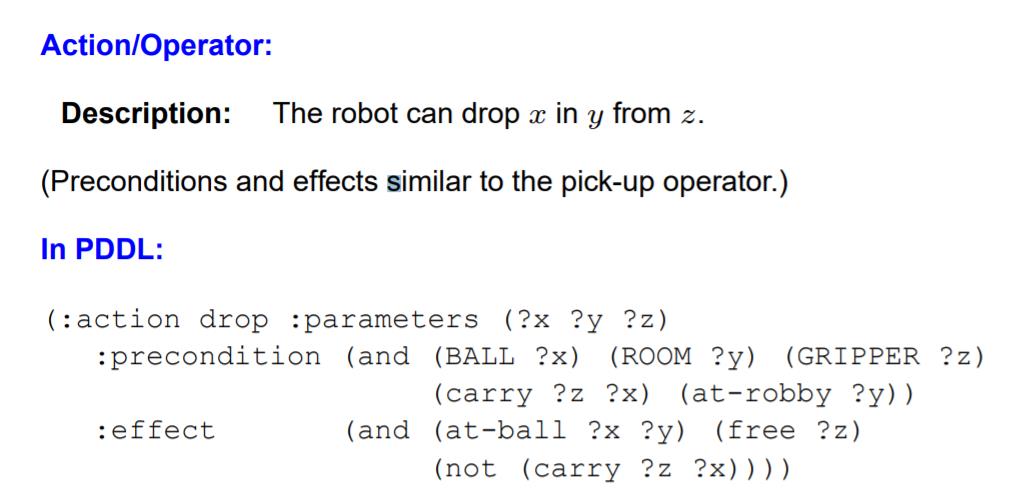
Gripper task: Drop operator
- drop操作:机器人使用z从y中丢掉x
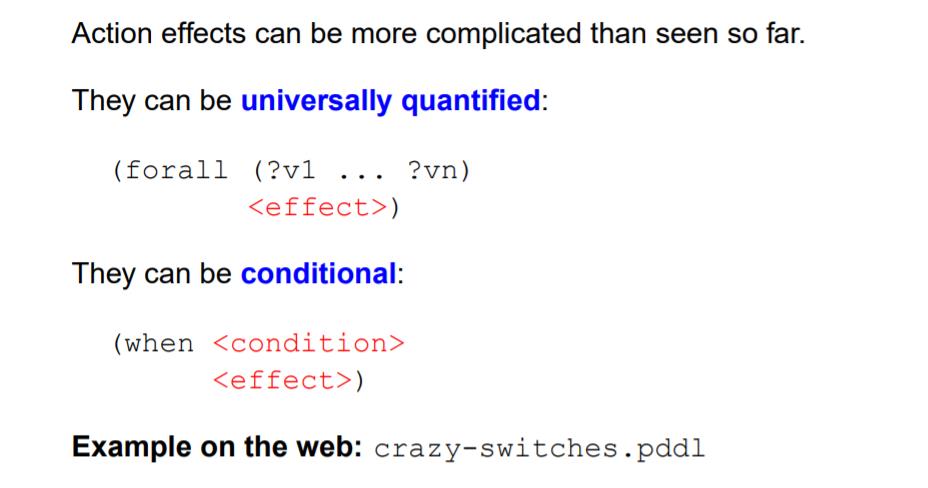
A Note on Action Effects
三.入门示例详解
1.domain.pddl
规划域描述整个规划世界的基础构成信息,包括实体类型、实体实例化、谓词逻辑状态、实体状态等。
- 定义:谓词和动作
示例代码如下:
(define (domain gripper-strips)
(:requirements :negative-preconditions)
(:predicates (room ?r)
(ball ?b)
(at ?b ?r)
(at-robby ?r)
(gripper ?g)
(free ?g)
(carry ?b ?g))
(:action pick
:parameters(?obj ?room ?gripper)
:precondition
(and
(ball ?obj)
(room ?room)
(gripper ?gripper)
(free ?gripper)
(at ?obj ?room)
(at-robby ?room)
)
:effect
(and
(not
(free ?gripper)
)
(carry ?obj ?gripper)
(not (at ?obj ?room))
)
)
(:action move
:parameters (?from ?to)
:precondition
(and
(room ?from)
(room ?to)
(at-robby ?from)
)
:effect
(and
(at-robby ?to)
(not
(at-robby ?from)
)
)
)
(:action drop
:parameters (?room ?ball ?gripper)
:precondition
(and
(room ?room)
(ball ?ball)
(at-robby ?room)
(gripper ?gripper)
(not
(free ?gripper)
)
(carry ?ball ?gripper)
(at-robby ?room))
:effect
(and
(free ?gripper)
(at ?ball ?room)
(not
(carry ?ball ?gripper)
)
)
)
)
2.question.pddl
问题域描述在这样的规划世界中一个具体问题的条件与目标。
- 目标:将ball1和ball2两个球从a房间移动到b房间
- 定义:对象、 初始状态和目标规范
示例代码如下:
(define (problem solve)
(:domain gripper-strips)
(:objects
rooma roomb
ball1 ball2
left right
)
(:init
(room rooma)
(room roomb)
(ball ball1)
(ball ball2)
(gripper left)
(gripper right)
(free left)
(free right)
(at ball1 rooma)
(at ball2 rooma)
(at-robby rooma)
)
(:goal
(and
(at ball1 roomb)
(at ball2 roomb)
)
)
)
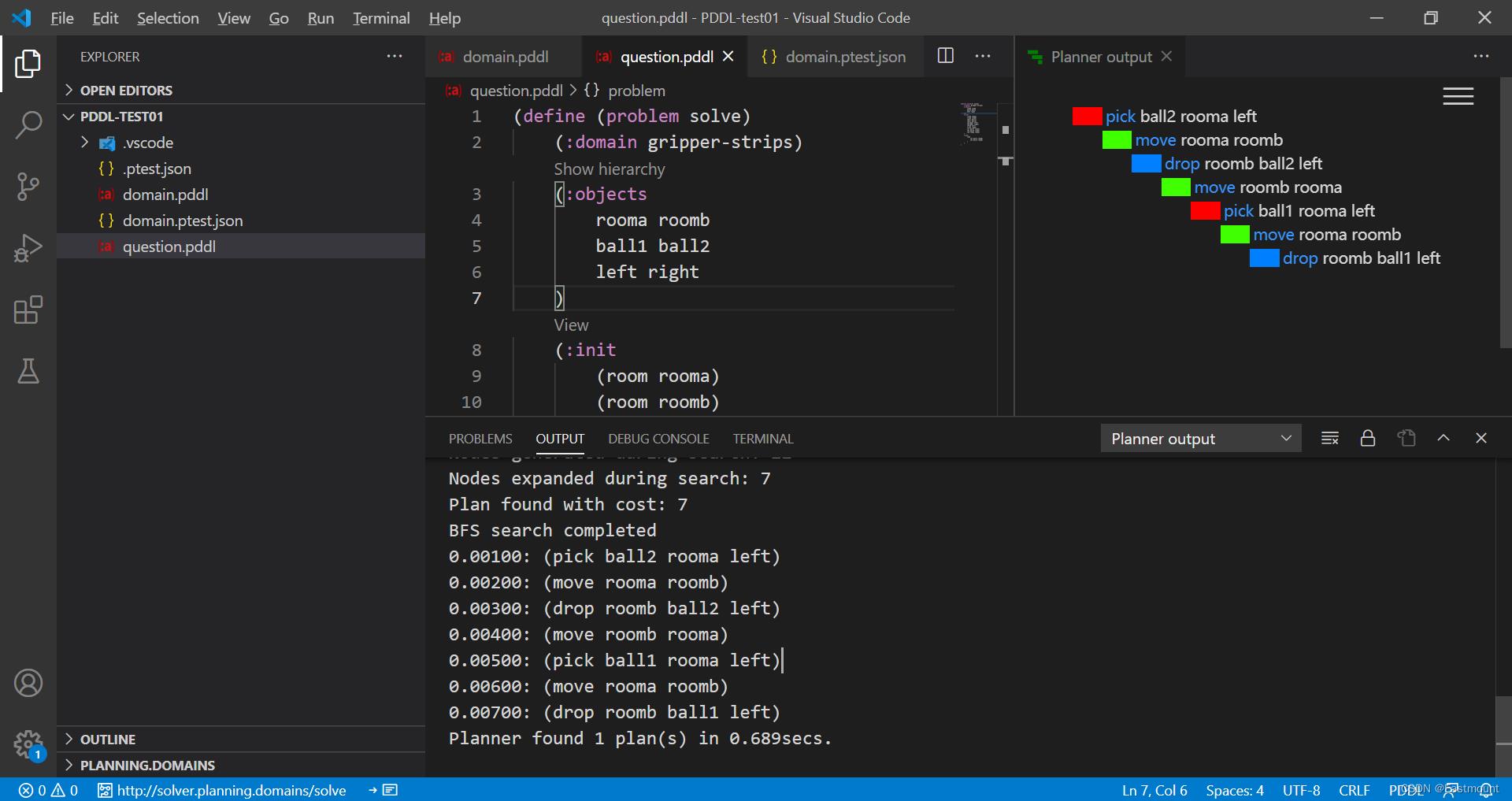
3.运行结果
运行结果如下图所示:
Planning service: http://solver.planning.domains/solve
Domain: gripper-strips, Problem: solve
--- OK.
Match tree built with 18 nodes.
PDDL problem description loaded:
Domain: GRIPPER-STRIPS
Problem: SOLVE
#Actions: 18
#Fluents: 14
Landmarks found: 2
Starting search with IW (time budget is 60 secs)...
rel_plan size: 5
#RP_fluents 7
Caption
#goals, #UNnachieved, #Achieved -> IW(max_w)
2/2/0:IW(1) -> [2][3][4]rel_plan size: 4
#RP_fluents 6
2/1/1:IW(1) -> [2][3][4][5][6][7];; NOT I-REACHABLE ;;
Total time: 4.47035e-10
Nodes generated during search: 42
Nodes expanded during search: 35
IW search completed
Starting search with BFS(novel,land,h_add)...
--[4294967295 / 8]--
--[1 / 8]--
--[1 / 6]--
--[1 / 5]--
--[1 / 4]--
--[1 / 2]--
--[1 / 1]--
--[1 / 0]--
--[0 / 0]--
Total time: 4.47035e-10
Nodes generated during search: 22
Nodes expanded during search: 7
Plan found with cost: 7
BFS search completed
0.00100: (pick ball2 rooma left)
0.00200: (move rooma roomb)
0.00300: (drop roomb ball2 left)
0.00400: (move roomb rooma)
0.00500: (pick ball1 rooma left)
0.00600: (move rooma roomb)
0.00700: (drop roomb ball1 left)
Planner found 1 plan(s) in 0.689secs.
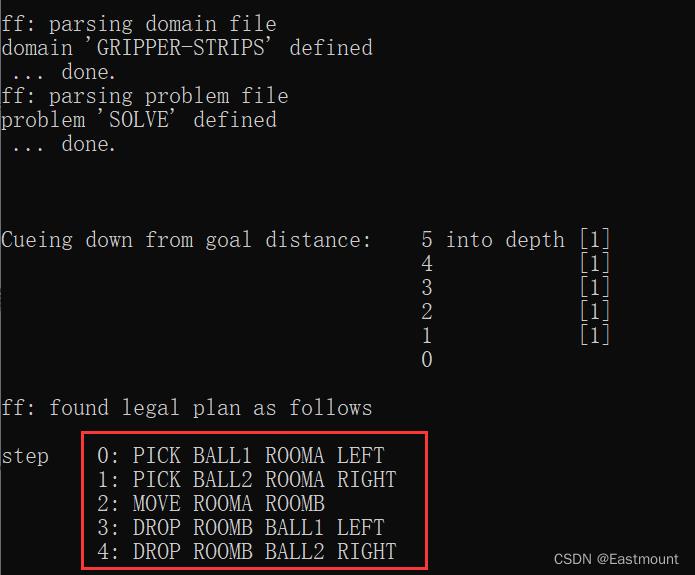
另一种运行结果如下图所示:
4.逻辑解释
下面介绍该实例的智能规划逻辑。
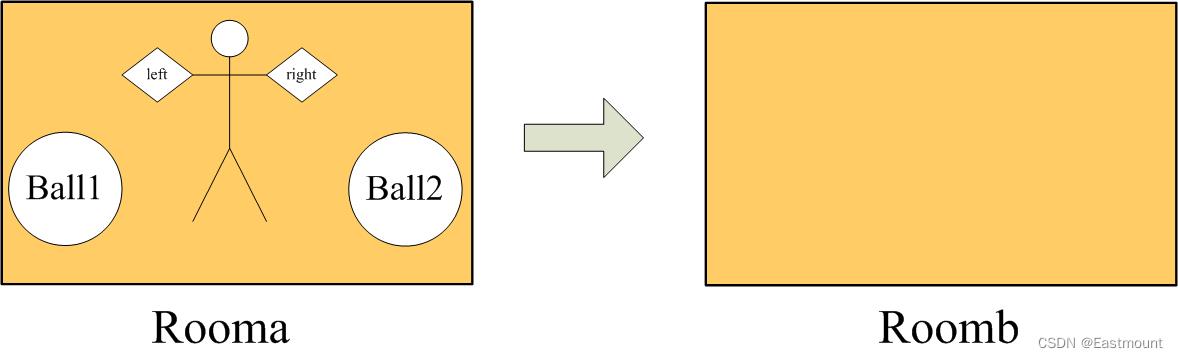
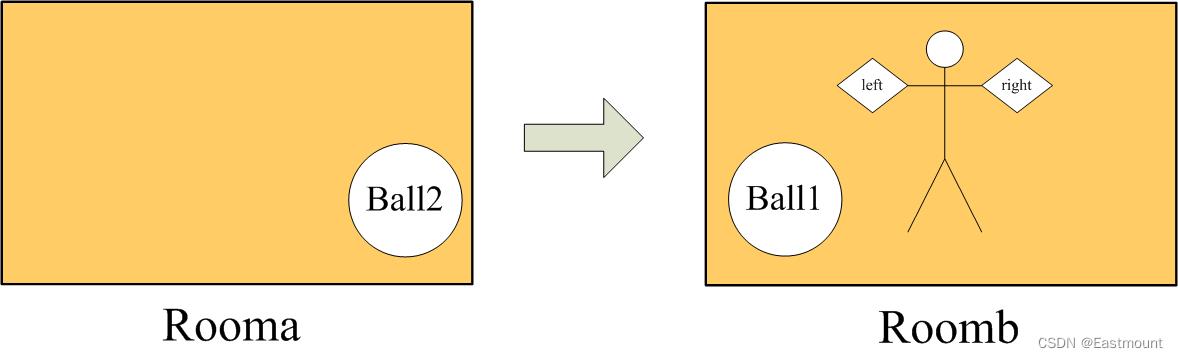
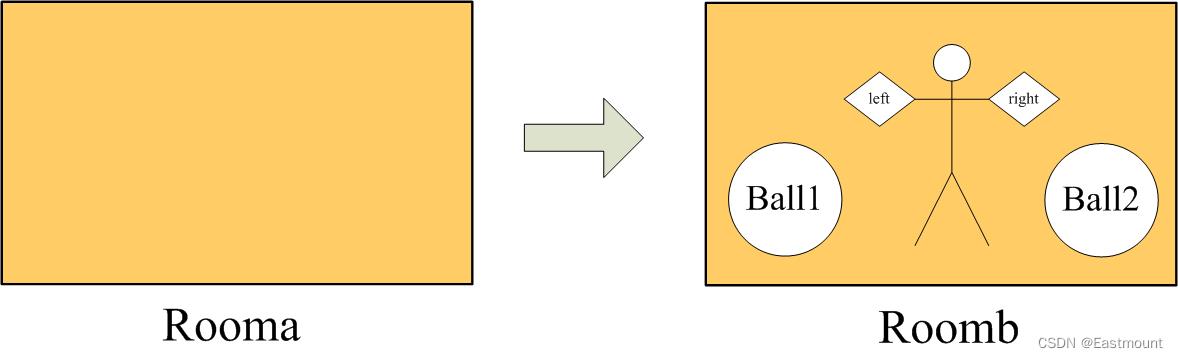
前提:假设存在两个房间(Rooma和Roomb)、两个球(Ball1和Ball2)机器人拥有左手和右手,且机器人和球初始位置是Rooma房间。
- action pick
- action move
- action drop
问题:如何将两个球从房间Rooma移动到Roomb?
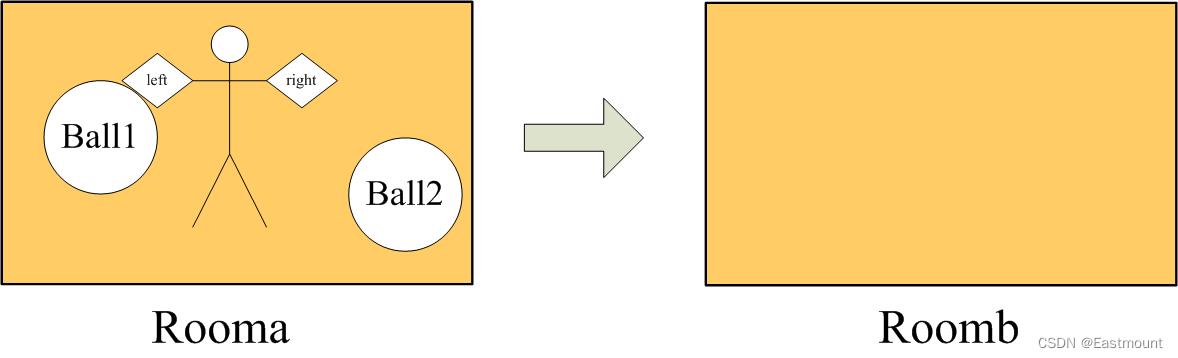
第一步:机器人左手提起Ball1。
第二步:机器人移动至Roomb。
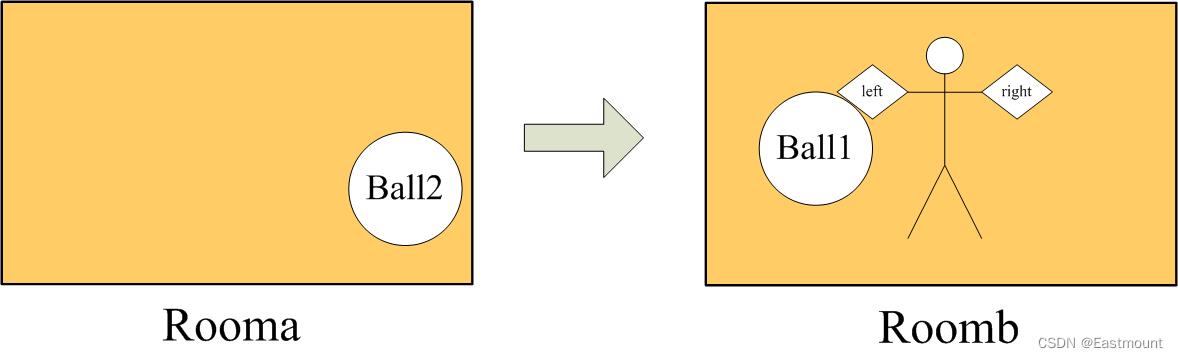
第三步:机器人释放Ball1。
第四步:机器人移动至Rooma。
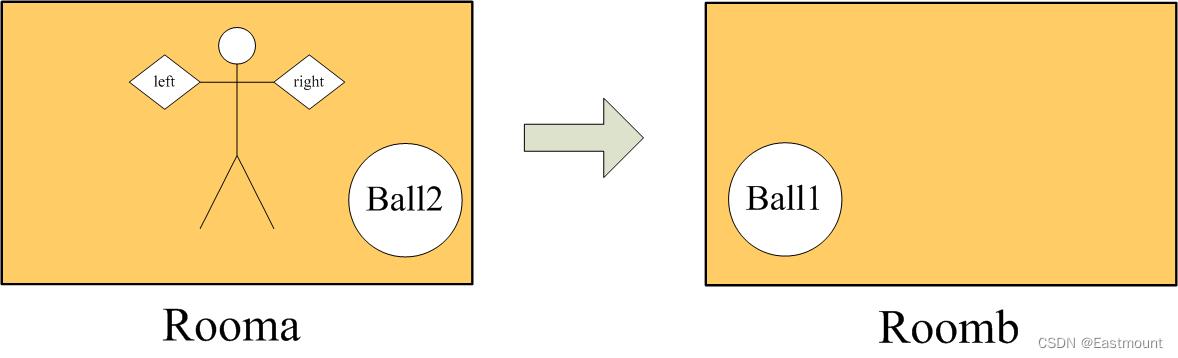
第五步:机器人右手拿起Ball2。
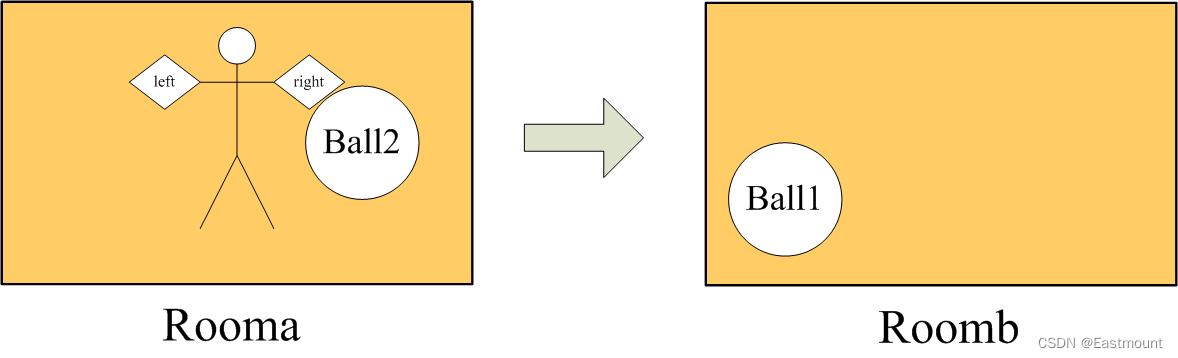
第六步:机器人移动至Roomb。
第七步:机器人右手释放Ball2。
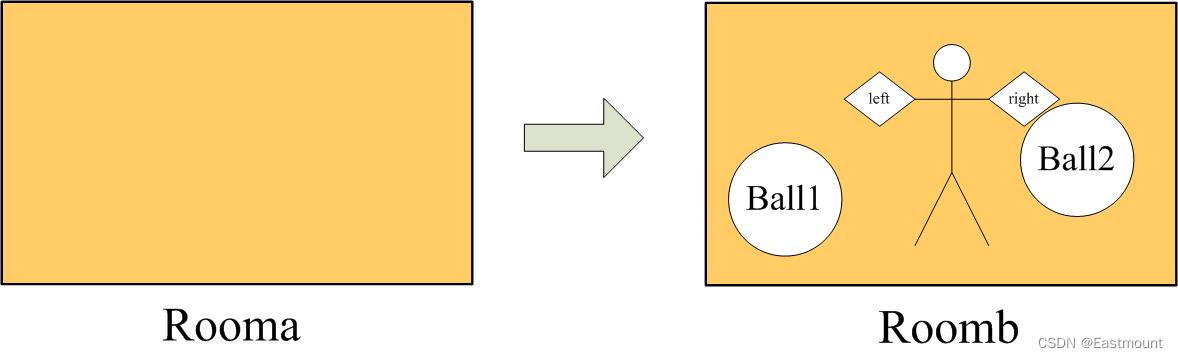
至此,完成移动任务。PDDL显示的逻辑路线如下图所示:
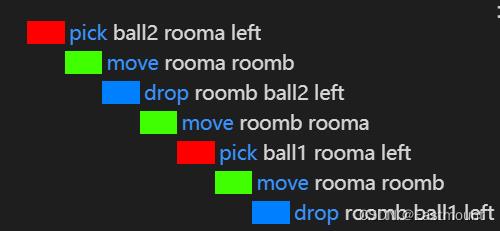
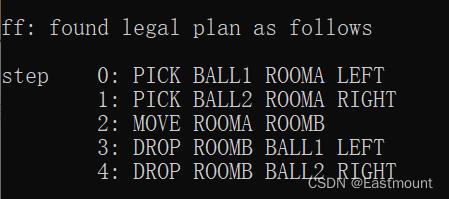
另一种方法如下图所示:机器人捡起两个球移动再释放。
四.总结
写到这里,本文就介绍完毕,希望对您有所帮助。
- 一.PDDL简介
- 二.PDDL基础语法知识
- 三.入门示例详解
1.domain.pddl
2.question.pddl
3.运行结果
4.逻辑解释 - 四.总结
大学之道在明明德,
在亲民,在止于至善。
这周又回答了很多博友的问题,有大一学生的困惑,有论文的咨询,也有老乡和考博的疑问,还有无数博友奋斗路上的相互勉励。虽然自己早已忙成狗,但总忍不住去解答别人的问题。最后那一句感谢和祝福,永远是我最大的满足。虽然会花费我一些时间,但也挺好的,无所谓了,跟着心走。不负遇见,感恩同行。莫愁前路无知己,继续加油。晚安娜和珞。
(By:Eastmount 2023-01-12 夜于贵阳 http://blog.csdn.net/eastmount/ )
参考文献:
- Dongbox PDDL - CSDN 谢小波老师
- pddl智能规划语言基础学习笔记 - 知乎 寻风者风寻老师
- https://github.com/KCL-Planning/VAL
- https://www.youtube.com/watch?v=XW0z8Oik6G8
- https://marketplace.visualstudio.com/items?itemName=jan-dolejsi.pddl
- PDDL Tooling - Episode 1: Planning.Domains session
- https://www.programmersought.com/article/47365369263/
- https://arxiv.org/pdf/2008.11069.pdf
- https://blog.csdn.net/HitmeowEcho/article/details/105982457
以上是关于[PDDL人工智能] 02.PDDL规划领域定义语言之语法理解和示例详解的主要内容,如果未能解决你的问题,请参考以下文章