动手学CV-目标检测入门教程2:VOC数据集
Posted 随煜而安
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了动手学CV-目标检测入门教程2:VOC数据集相关的知识,希望对你有一定的参考价值。
3.2 目标检测数据集VOC
本文来自开源组织 DataWhale 🐳 CV小组创作的目标检测入门教程。
对应开源项目 《动手学CV-Pytorch》 的第3章的内容,教程中涉及的代码也可以在项目中找到,后续会持续更新更多的优质内容,欢迎⭐️。
如果使用我们教程的内容或图片,请在文章醒目位置注明我们的github主页链接:https://github.com/datawhalechina/dive-into-cv-pytorch
3.2.1 VOC数据集简介
VOC数据集是目标检测领域最常用的标准数据集之一,几乎所有检测方向的论文,如faster_rcnn、yolo、SSD等都会给出其在VOC数据集上训练并评测的效果。因此我们我们的教程也基于VOC来开展实验,具体地,我们使用VOC2007和VOC2012这两个最流行的版本作为训练和测试的数据。
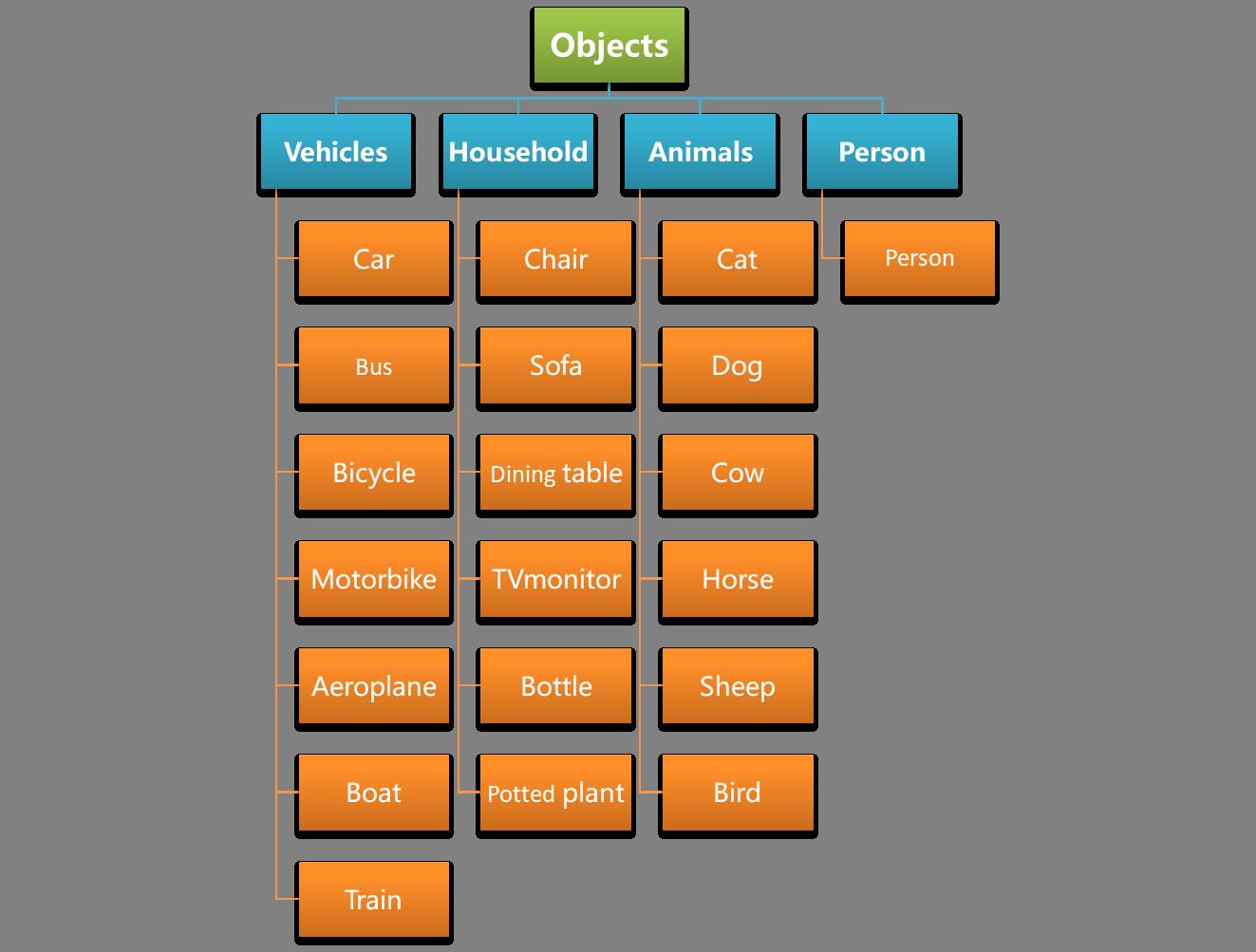
数据集类别
VOC数据集在类别上可以分为4大类,20小类,其类别信息如图3-5所示。
数据集量级
VOC数量集图像和目标数量的基本信息如下图3-6所示:

其中,Images表示图片数量,Objects表示目标数量
数据集下载
VOC官网经常上不去,为确保后续实验准确且顺利的进行,大家可以点击这里的百度云链接进行下载:
🐳 VOC百度云下载链接 解压码(7aek)
下载后放到dataset目录下解压即可
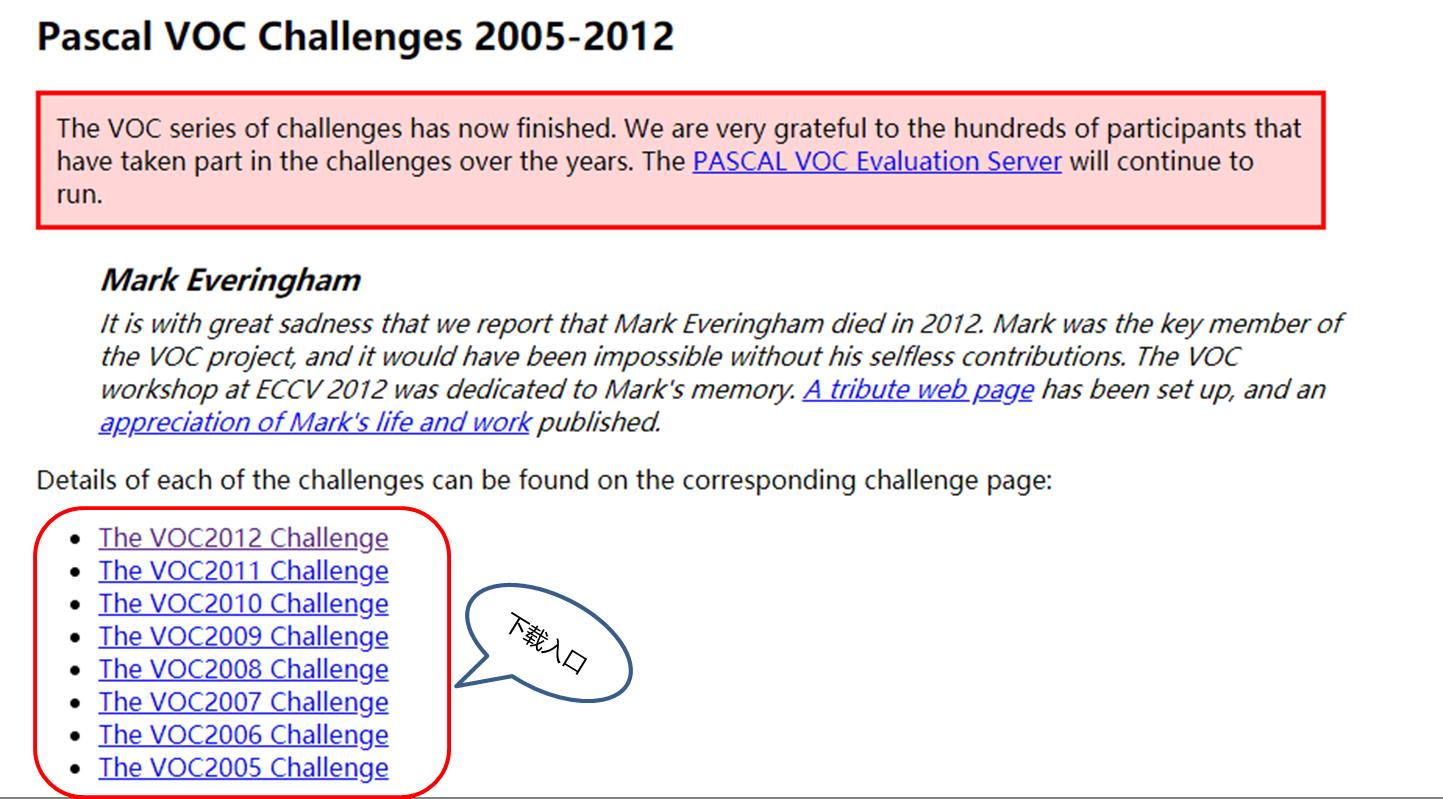
下面是通过官网下载的步骤:
-
进入VOC官网链接:http://host.robots.ox.ac.uk/pascal/VOC/
-
在图3-7所示区域找到历年VOC挑战赛链接,比如选择VOC2012.
- 在VOC2012页面,找到图3-8所示区域,点击下载即可。
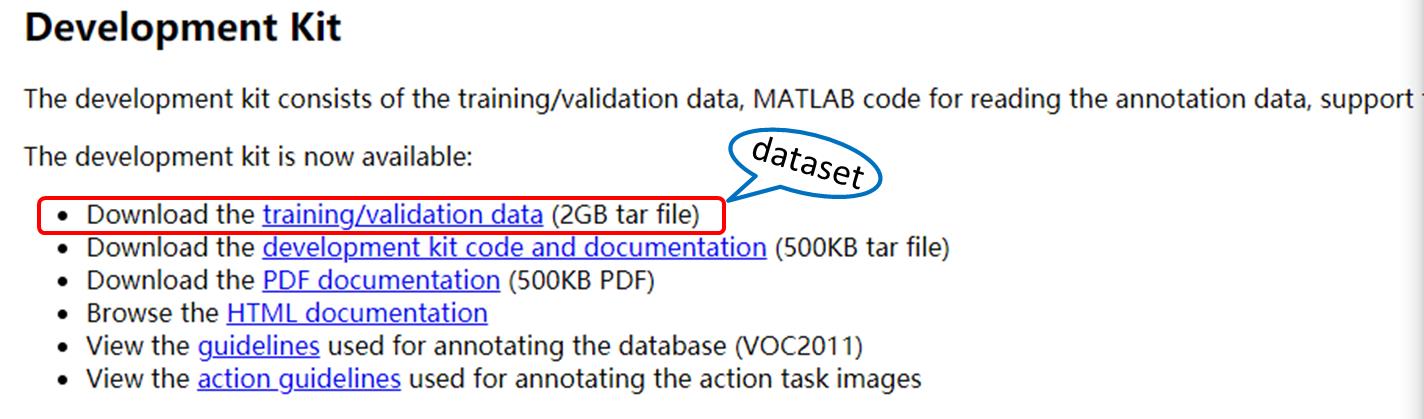
- VOC2007同理进行下载即可
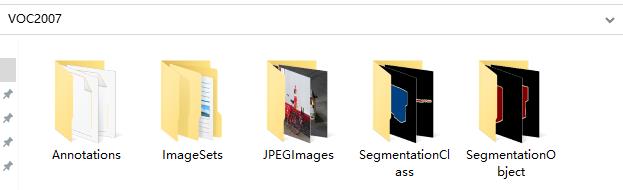
数据集说明
将下载得到的压缩包解压,可以得到如图3-9所示的一系列文件夹,由于VOC数据集不仅被拿来做目标检测,也可以拿来做分割等任务,因此除了目标检测所需的文件之外,还包含分割任务所需的文件,比如SegmentationClass,SegmentationObject,这里,我们主要对目标检测任务涉及到的文件进行介绍。
1.JPEGImages
这个文件夹中存放所有的图片,包括训练验证测试用到的所有图片。
2.ImageSets
这个文件夹中包含三个子文件夹,Layout、Main、Segmentation
-
Layout文件夹中存放的是train,valid,test和train+valid数据集的文件名
-
Segmentation文件夹中存放的是分割所用train,valid,test和train+valid数据集的文件名
-
Main文件夹中存放的是各个类别所在图片的文件名,比如cow_val,表示valid数据集中,包含有cow类别目标的图片名称。
3.Annotations
Annotation文件夹中存放着每张图片相关的标注信息,以xml格式的文件存储,可以通过记事本或者浏览器打开,我们以000001.jpg这张图片为例说明标注文件中各个属性的含义,见图3-10。
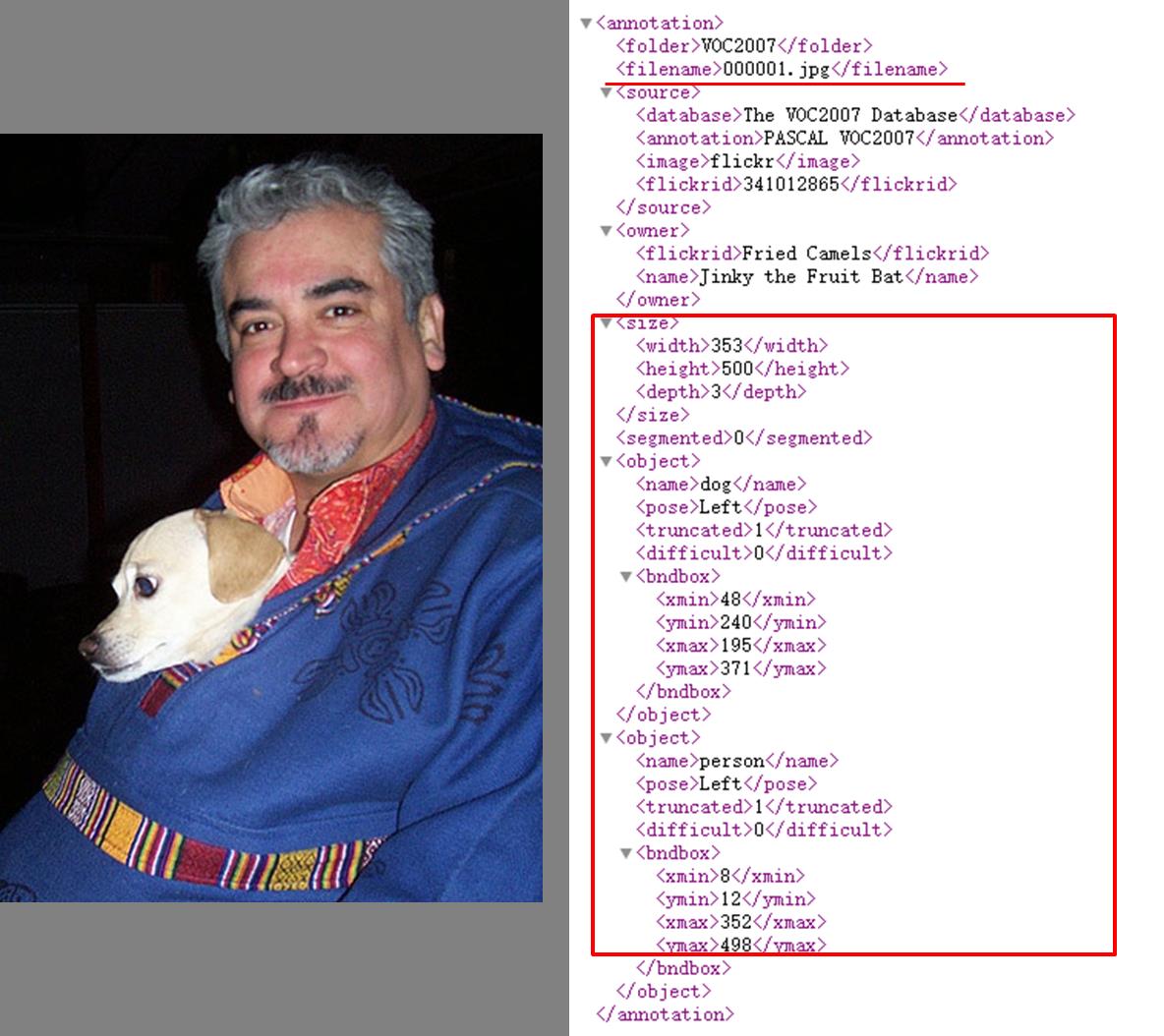
猛一看去,内容又多又复杂,其实仔细研究一下,只有红框区域内的内容是我们真正需要关注的。
-
filename:图片名称
-
size:图片宽高,
-
depth表示图片通道数
-
object:表示目标,包含下面两部分内容。
-
首先是目标类别name为dog。pose表示目标姿势为left,truncated表示是否是一个被截断的目标,1表示是,0表示不是,在这个例子中,只露出狗头部分,所以truncated为1。difficult为0表示此目标不是一个难以识别的目标。
-
然后就是目标的bbox信息,可以看到,这里是以[xmin,ymin,xmax,ymax]格式进行标注的,分别表示dog目标的左上角和右下角坐标。
- 一张图片中有多少需要识别的目标,其xml文件中就有多少个object。上面的例子中有两个object,分别对应人和狗。
3.2.2 VOC数据集的dataloader的构建
1. 数据集准备
根据上面的介绍可以看出,VOC数据集的存储格式还是比较复杂的,为了后面训练中的读取代码更加简洁,这里我们准备了一个预处理脚本create_data_lists.py。
该脚本的作用是进行一系列的数据准备工作,主要是提前将记录标注信息的xml文件(Annotations)进行解析,并将信息整理到json文件之中,这样在运行训练脚本时,只需简单的从json文件中读取已经按想要的格式存储好的标签信息即可。
注: 这样的预处理并不是必须的,和算法或数据集本身均无关系,只是取决于开发者的代码习惯,不同检测框架的处理方法也是不一致的。
可以看到,create_data_lists.py脚本仅有几行代码,其内部调用了utils.py中的create_data_lists方法:
"""python
create_data_lists
"""
from utils import create_data_lists
if __name__ == '__main__':
# voc07_path,voc12_path为我们训练测试所需要用到的数据集,output_folder为我们生成构建dataloader所需文件的路径
# 参数中涉及的路径以个人实际路径为准,建议将数据集放到dataset目录下,和教程保持一致
create_data_lists(voc07_path='../../../dataset/VOCdevkit/VOC2007',
voc12_path='../../../dataset/VOCdevkit/VOC2012',
output_folder='../../../dataset/VOCdevkit')
设置好对应路径后,我们运行数据集准备脚本:
tiny_detector_demo$ python create_data_lists.py
很快啊!dataset/VOCdevkit目录下就生成了若干json文件,这些文件会在后面训练中真正被用到。
不妨手动打开这些json文件,看下都记录了哪些信息。
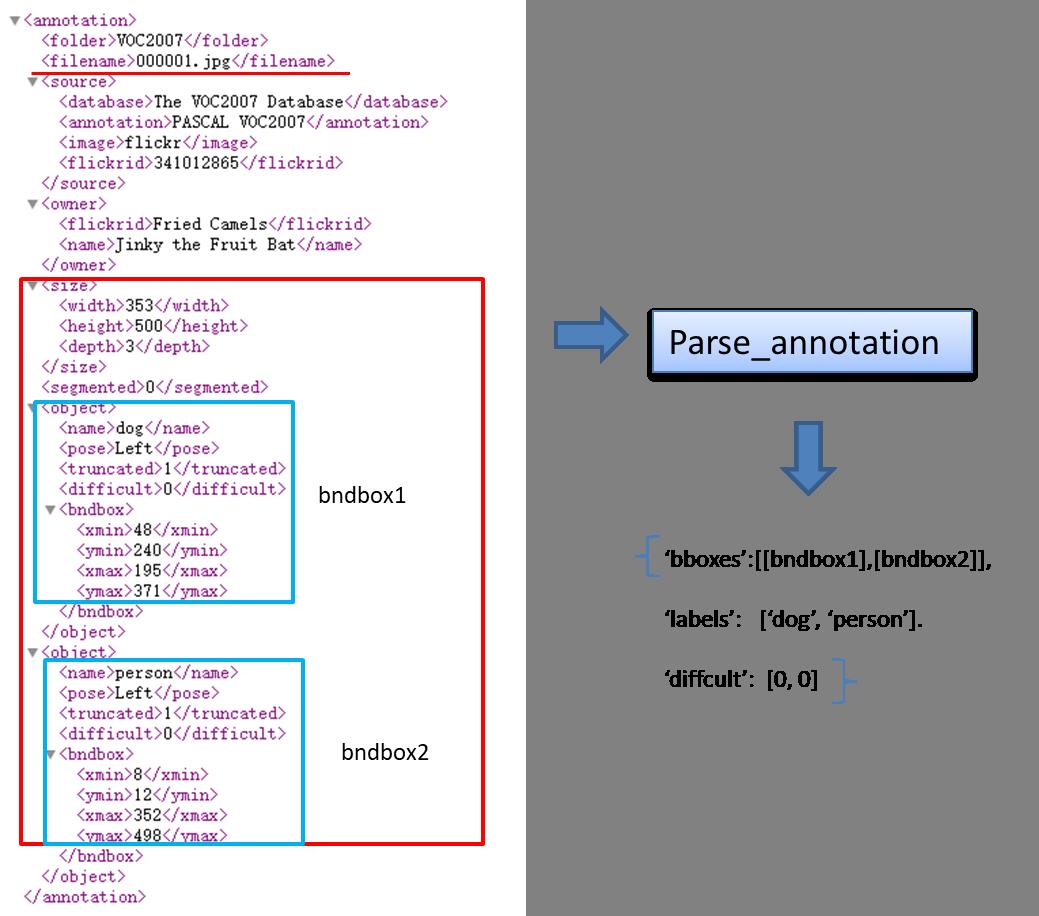
下面来介绍一下parse_annotation函数内部都做了什么,json中又记录了哪些信息。这部分作为选学,不感兴趣可以跳过,只要你已经明确了json中记录的信息的含义。
代码阅读可以参照注释,建议配图3-11一起食用:
"""python
xml文件解析
"""
import json
import os
import torch
import random
import xml.etree.ElementTree as ET #解析xml文件所用工具
import torchvision.transforms.functional as FT
#GPU设置
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
# Label map
#voc_labels为VOC数据集中20类目标的类别名称
voc_labels = ('aeroplane', 'bicycle', 'bird', 'boat', 'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable',
'dog', 'horse', 'motorbike', 'person', 'pottedplant', 'sheep', 'sofa', 'train', 'tvmonitor')
#创建label_map字典,用于存储类别和类别索引之间的映射关系。比如:1:'aeroplane', 2:'bicycle',......
label_map = k: v + 1 for v, k in enumerate(voc_labels)
#VOC数据集默认不含有20类目标中的其中一类的图片的类别为background,类别索引设置为0
label_map['background'] = 0
#将映射关系倒过来,类别名称:类别索引
rev_label_map = v: k for k, v in label_map.items() # Inverse mapping
#解析xml文件,最终返回这张图片中所有目标的标注框及其类别信息,以及这个目标是否是一个difficult目标
def parse_annotation(annotation_path):
#解析xml
tree = ET.parse(annotation_path)
root = tree.getroot()
boxes = list() #存储bbox
labels = list() #存储bbox对应的label
difficulties = list() #存储bbox对应的difficult信息
#遍历xml文件中所有的object,前面说了,有多少个object就有多少个目标
for object in root.iter('object'):
#提取每个object的difficult、label、bbox信息
difficult = int(object.find('difficult').text == '1')
label = object.find('name').text.lower().strip()
if label not in label_map:
continue
bbox = object.find('bndbox')
xmin = int(bbox.find('xmin').text) - 1
ymin = int(bbox.find('ymin').text) - 1
xmax = int(bbox.find('xmax').text) - 1
ymax = int(bbox.find('ymax').text) - 1
#存储
boxes.append([xmin, ymin, xmax, ymax])
labels.append(label_map[label])
difficulties.append(difficult)
#返回包含图片标注信息的字典
return 'boxes': boxes, 'labels': labels, 'difficulties': difficulties
看了上面的代码如果还不太明白,试试结合这张图理解下:
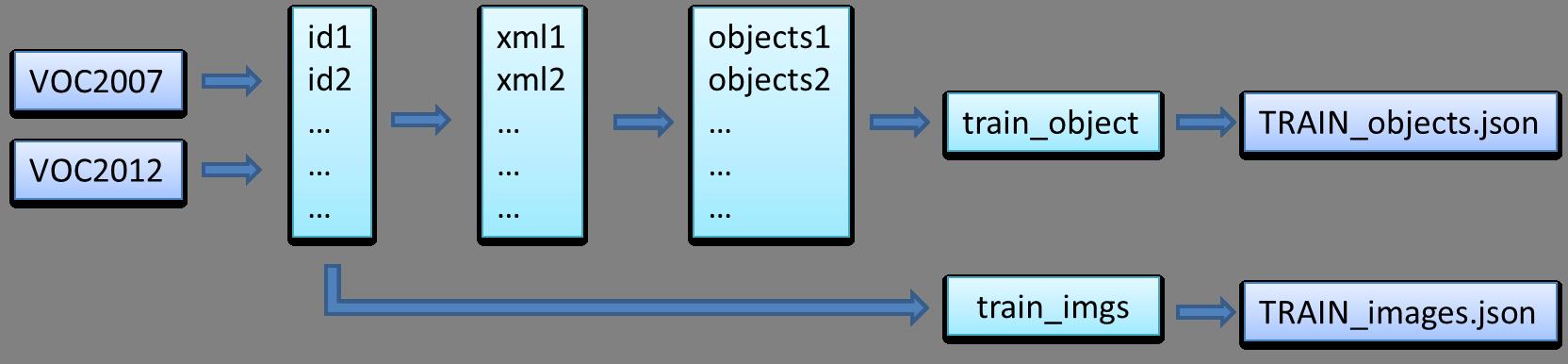
接下来看一下create_data_lists函数在做什么,建议配图3-12一起食用:
"""python
分别读取train和valid的图片和xml信息,创建用于训练和测试的json文件
"""
def create_data_lists(voc07_path, voc12_path, output_folder):
"""
Create lists of images, the bounding boxes and labels of the objects in these images, and save these to file.
:param voc07_path: path to the 'VOC2007' folder
:param voc12_path: path to the 'VOC2012' folder
:param output_folder: folder where the JSONs must be saved
"""
#获取voc2007和voc2012数据集的绝对路径
voc07_path = os.path.abspath(voc07_path)
voc12_path = os.path.abspath(voc12_path)
train_images = list()
train_objects = list()
n_objects = 0
# Training data
for path in [voc07_path, voc12_path]:
# Find IDs of images in training data
#获取训练所用的train和val数据的图片id
with open(os.path.join(path, 'ImageSets/Main/trainval.txt')) as f:
ids = f.read().splitlines()
#根据图片id,解析图片的xml文件,获取标注信息
for id in ids:
# Parse annotation's XML file
objects = parse_annotation(os.path.join(path, 'Annotations', id + '.xml'))
if len(objects['boxes']) == 0: #如果没有目标则跳过
continue
n_objects += len(objects) #统计目标总数
train_objects.append(objects) #存储每张图片的标注信息到列表train_objects
train_images.append(os.path.join(path, 'JPEGImages', id + '.jpg')) #存储每张图片的路径到列表train_images,用于读取图片
assert len(train_objects) == len(train_images) #检查图片数量和标注信息量是否相等,相等才继续执行程序
# Save to file
#将训练数据的图片路径,标注信息,类别映射信息,分别保存为json文件
with open(os.path.join(output_folder, 'TRAIN_images.json'), 'w') as j:
json.dump(train_images, j)
with open(os.path.join(output_folder, 'TRAIN_objects.json'), 'w') as j:
json.dump(train_objects, j)
with open(os.path.join(output_folder, 'label_map.json'), 'w') as j:
json.dump(label_map, j) # save label map too
print('\\nThere are %d training images containing a total of %d objects. Files have been saved to %s.' % (
len(train_images), n_objects, os.path.abspath(output_folder)))
#与Train data一样,目的是将测试数据的图片路径,标注信息,类别映射信息,分别保存为json文件,参考上面的注释理解
# Test data
test_images = list()
test_objects = list()
n_objects = 0
# Find IDs of images in the test data
with open(os.path.join(voc07_path, 'ImageSets/Main/test.txt')) as f:
ids = f.read().splitlines()
for id in ids:
# Parse annotation's XML file
objects = parse_annotation(os.path.join(voc07_path, 'Annotations', id + '.xml'))
if len(objects) == 0:
continue
test_objects.append(objects)
n_objects += len(objects)
test_images.append(os.path.join(voc07_path, 'JPEGImages', id + '.jpg'))
assert len(test_objects) == len(test_images)
# Save to file
with open(os.path.join(output_folder, 'TEST_images.json'), 'w') as j:
json.dump(test_images, j)
with open(os.path.join(output_folder, 'TEST_objects.json'), 'w') as j:
json.dump(test_objects, j)
print('\\nThere are %d test images containing a total of %d objects. Files have been saved to %s.' % (
len(test_images), n_objects, os.path.abspath(output_folder)))
同样,建议配图食用:
到这里,我们的训练数据就准备好了,接下来开始一步步构建训练所需的dataloader吧!
2.构建dataloader
在这里,我们假设你对Pytorch的 Dataset 和 DataLoader 两个概念有最基本的了解。
如果没有,也不必担心,你可以先阅读一下第2-1节数据读取与数据扩增,进行简单的了解。
下面开始介绍构建dataloader的相关代码:
1.首先了解一下训练的时候在哪里定义了dataloader以及是如何定义的。
以下是train.py中的部分代码段:
#train_dataset和train_loader的实例化
train_dataset = PascalVOCDataset(data_folder,
split='train',
keep_difficult=keep_difficult)
train_loader = torch.utils.data.DataLoader(train_dataset, batch_size=batch_size, shuffle=True,
collate_fn=train_dataset.collate_fn, num_workers=workers,
pin_memory=True) # note that we're passing the collate function here
可以看到,首先需要实例化PascalVOCDataset类得到train_dataset,然后将train_dataset传入torch.utils.data.DataLoader,进而得到train_loader。
2.接下来看一下PascalVOCDataset是如何定义的。
代码位于 datasets.py 脚本中,可以看到,PascalVOCDataset继承了torch.utils.data.Dataset,然后重写了__init__ , __getitem__, __len__ 和 collate_fn 四个方法,这也是我们在构建自己的dataset的时候需要经常做的工作,配合下面注释理解代码:
"""python
PascalVOCDataset具体实现过程
"""
import torch
from torch.utils.data import Dataset
import json
import os
from PIL import Image
from utils import transform
class PascalVOCDataset(Dataset):
"""
A PyTorch Dataset class to be used in a PyTorch DataLoader to create batches.
"""
#初始化相关变量
#读取images和objects标注信息
def __init__(self, data_folder, split, keep_difficult=False):
"""
:param data_folder: folder where data files are stored
:param split: split, one of 'TRAIN' or 'TEST'
:param keep_difficult: keep or discard objects that are considered difficult to detect?
"""
self.split = split.upper() #保证输入为纯大写字母,便于匹配'TRAIN', 'TEST'
assert self.split in 'TRAIN', 'TEST'
self.data_folder = data_folder
self.keep_difficult = keep_difficult
# Read data files
with open(os.path.join(data_folder, self.split + '_images.json'), 'r') as j:
self.images = json.load(j)
with open(os.path.join(data_folder, self.split + '_objects.json'), 'r') as j:
self.objects = json.load(j)
assert len(self.images) == len(self.objects)
#循环读取image及对应objects
#对读取的image及objects进行tranform操作(数据增广)
#返回PIL格式图像,标注框,标注框对应的类别索引,对应的difficult标志(True or False)
def __getitem__(self, i):
# Read image
#*需要注意,在pytorch中,图像的读取要使用Image.open()读取成PIL格式,不能使用opencv
#*由于Image.open()读取的图片是四通道的(RGBA),因此需要.convert('RGB')转换为RGB通道
image = Image.open(self.images[i], mode='r')
image = image.convert('RGB')
# Read objects in this image (bounding boxes, labels, difficulties)
objects = self.objects[i]
boxes = torch.FloatTensor(objects['boxes']) # (n_objects, 4)
labels = torch.LongTensor(objects['labels']) # (n_objects)
difficulties = torch.ByteTensor(objects['difficulties']) # (n_objects)
# Discard difficult objects, if desired
#如果self.keep_difficult为False,即不保留difficult标志为True的目标
#那么这里将对应的目标删去
if not self.keep_difficult:
boxes = boxes[1 - difficulties]
labels = labels[1 - difficulties]
difficulties = difficulties[1 - difficulties]
# Apply transformations
#对读取的图片应用transform
image, boxes, labels, difficulties = transform(image, boxes, labels, difficulties, split=self.split)
return image, boxes, labels, difficulties
#获取图片的总数,用于计算batch数
def __len__(self):
return len(self.images)
#我们知道,我们输入到网络中训练的数据通常是一个batch一起输入,而通过__getitem__我们只读取了一张图片及其objects信息
#如何将读取的一张张图片及其object信息整合成batch的形式呢?
#collate_fn就是做这个事情,
#对于一个batch的images,collate_fn通过torch.stack()将其整合成4维tensor,对应的objects信息分别用一个list存储
def collate_fn(self, batch):
"""
Since each image may have a different number of objects, we need a collate function (to be passed to the DataLoader).
This describes how to combine these tensors of different sizes. We use lists.
Note: this need not be defined in this Class, can be standalone.
:param batch: an iterable of N sets from __getitem__()
:return: a tensor of images, lists of varying-size tensors of bounding boxes, labels, and difficulties
"""
images = list()
boxes = list()
labels = list()
difficulties = list()
for b in batch:
images.append(b[0])
boxes.append(b[1])
labels.append(b[2])
difficulties.append(b[3])
#(3,224,224) -> (N,3,224,224)
images = torch.stack(images, dim=0)
return images, boxes, labels, difficulties # tensor (N, 3, 224, 224), 3 lists of N tensors each
3.关于数据增强
到这里为止,我们的dataset就算是构建好了,已经可以传给torch.utils.data.DataLoader来获得用于输入网络训练的数据了。
但是不急,构建dataset中有个很重要的一步我们上面只是提及了一下,那就是transform操作(数据增强)。
也就是这一行代码
image, boxes, labels, difficulties = transform(image, boxes, labels, difficulties, split=self.split)
这部分比较重要,但是涉及代码稍多,对于基础较薄弱的伙伴可以作为选学内容,后面再认真读代码。你只需知道,同分类网络一样,训练目标检测网络同样需要进行数据增强,这对提升网络精度和泛化能力很有帮助。
需要注意的是,涉及位置变化的数据增强方法,同样需要对目标框进行一致的处理,因此目标检测框架的数据处理这部分的代码量通常都不小,且比较容易出bug。这里为了降低代码的难度,我们只是使用了几种比较简单的数据增强。
transform 函数的具体代码实现位于 utils.py 中,下面简单进行讲解:
"""python
transform操作是训练模型中一项非常重要的工作,其中不仅包含数据增强以提升模型性能的相关操作,也包含如数据类型转换(PIL to Tensor)、归一化(Normalize)这些必要操作。
"""
import json
import os
import torch
import random
import xml.etree.ElementTree as ET
import torchvision.transforms.functional as FT
"""
可以看到,transform分为TRAIN和TEST两种模式,以本实验为例:
在TRAIN时进行的transform有:
1.以随机顺序改变图片亮度,对比度,饱和度和色相,每种都有50%的概率被执行。photometric_distort
2.扩大目标,expand
3.随机裁剪图片,random_crop
4.0.5的概率进行图片翻转,flip
*注意:a. 第一种transform属于像素级别的图像增强,目标相对于图片的位置没有改变,因此bbox坐标不需要变化。
但是2,3,4,5都属于图片的几何变化,目标相对于图片的位置被改变,因此bbox坐标要进行相应变化。
在TRAIN和TEST时都要进行的transform有:
1.统一图像大小到(224,224),resize
2.PIL to Tensor
3.归一化,FT.normalize()
注1: resize也是一种几何变化,要知道应用数据增强策略时,哪些属于几何变化,哪些属于像素变化
注2: PIL to Tensor操作,normalize操作必须执行
"""
def transform(image, boxes, labels, difficulties, split):
"""
Apply the transformations above.
:param image: image, a PIL Image
:param boxes: bounding boxes in boundary coordinates, a tensor of dimensions (n_objects, 4)
:param labels: labels of objects, a tensor of dimensions (n_objects)
:param difficulties: difficulties of detection of these objects, a tensor of dimensions (n_objects)
:param split: one of 'TRAIN' or 'TEST', since different sets of transformations are applied
:return: transformed image, transformed bounding box coordinates, transformed labels, transformed difficulties
"""
#在训练和测试时使用的transform策略往往不完全相同,所以需要split变量指明是TRAIN还是TEST时的transform方法
assert split in 'TRAIN', 'TEST'
# Mean and standard deviation of ImageNet data that our base VGG from torchvision was trained on
# see: https://pytorch.org/docs/stable/torchvision/models.html
#为了防止由于图片之间像素差异过大而导致的训练不稳定问题,图片在送入网络训练之间需要进行归一化
#对所有图片各通道求mean和std来获得
mean = [0.485, 0.456, 0.406]
std = [0.229, 0.224, 0.225]
new_image = image
new_boxes = boxes
new_labels = labels
new_difficulties = difficulties
# Skip the following operations for evaluation/testing
if split == 'TRAIN':
# A series of photometric distortions in random order, each with 50% chance of occurrence, as in Caffe repo
new_image = photometric_distort(new_image