大疆精灵3的其他参数
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了大疆精灵3的其他参数相关的知识,希望对你有一定的参考价值。

飞行器
重量 (含电池及桨):1236 克
轴距:350毫米
最大上升速度:5 米/秒
最大下降速度:3 米/秒
悬停精度:垂直: +/- 0.1 米 (超声波工作范围内); +/- 0.5 米 ;水平: +/- 1.5 米
最大水平飞行速度:16 米/秒
最大起飞海拔高度:6000 米
最大飞行时间:约25分钟
工作环境温度:0°C 至 40°C
卫星定位模块:GPS/GLONASS双模
云台
可控转动范围:俯仰 -90° 至 +30°
稳定系统:3-轴 (俯仰, 横滚, 偏航)
遥控器
工作频率:2.4 GHz&5.8 GHz
信号最大有效距离:2.4 GHz: 1000m (FCC); 500m (SRRC); 500m (CE) ;5.8 GHz: 4000m (FCC); 3000m(SRRC); 400m(CE)(室外开阔无遮挡环境)
工作环境温度:0°C- 40°C
电池:2600 mAh 锂充电电池18650
移动设备支架:适用于平板电脑或手机
智能飞行电池
容量:4480 mAh
电压:15.2 V
电池类型:LiPo 4S
能量:68 Wh
电池整体重量:365 克
充电环境温度:5°C - 40°C
最大充电功率:100 W
其他注解:最大起飞海拔高度是指飞行器可以在该海拔高度范围内起飞。飞行器最大飞行高度默认限制为120米(最高可达500米)。各国家/地区的限飞高度有所不同,请联系当地的航空管理部门了解实际限高,飞行时需严格遵守当地法律法规。
相机
影像传感器:1/2.3 英寸 CMOS;有效像素 1200 万
镜头:FOV 94° 20 mm (35 mm 格式等效) f/2.8,对焦点无穷远
ISO 范围:100-3200 (视频);100-1600 (照片)
电子快门速度:8 秒 至 1/8000 秒
照片最大分辨率:4000 x 3000
照片拍摄模式:单张拍摄;多张连拍 (BURST): 3/5/7 张;自动包围曝光(AEB): 3/5 张 @0.7EV 步长;定时拍摄
录像分辨率:
C4K:4096 x 2160 24/25p
4K:3840 x 2160 24/25/30p
2.7K:2704 x 1520 24/25/30p
FHD:1920 x 1080 24/25/30/48/50/60p
HD: 1280 x 720 24/25/30/48/50/60p
支持存储卡类型:Micro SD™ 最大支持 64GB 容量,传输速度为Class10及以上或达到UHS-1评级的Micro SD卡
视频存储最大码流:60 Mbps
支持文件存储格式:文件系统: FAT32/exFAT;图片格式: JPEG, DNG;视频格式: MP4,MOV (MPEG-4 AVC/H.264)
工作环境温度:0°C 至 40°C
视觉定位系统
视觉系统:下视视觉系统
速度测量范围:飞行速度小于 8 米 / 秒 (高度 2 米,光照充足)
高度测量范围:30 厘米 至 300 厘米
精确悬停范围:50 厘米 至 300 厘米
使用环境:地面有丰富纹理,光照条件充足 (>15 lux,室内日光灯正常照射环境)
充电器
电压:17.4 V
额定功率:57 W
APP / 图传
移动设备 App:DJI GO
最高实时图传:720P @ 30fps
移动设备系统版本要求:ios 9.0 或更高版本;android 4.4.0 或更高版本
支持的移动设备:
iOS: iPhone 5s、iPhone SE、iPhone 6、iPhone 6 Plus、iPhone 6s、iPhone 6s Plus、 iPhone 7、 iPhone 7 Plus、iPad Air、iPad Air Wi-Fi + Cellular、iPad mini 2、iPad mini 2 Wi-Fi + Cellular、iPad Air 2、iPad Air 2 Wi-Fi + Cellular、iPad mini 3、iPad mini 3 Wi-Fi + Cellular、iPad mini 4 和 iPad mini 4 Wi-Fi + Cellular。
Android: 兼容 Samsung tabs 705c、Samsung S6、Samsung S5、Samsung NOTE4、Samsung NOTE3、Google Nexus 9、Google Nexus 7 II、Ascend Mate7、Huawei P8 Max、Huawei Mate 8、Nubia Z7 mini、Sony Xperia Z3、MI 3、MI PAD、Smartisan T1。
* 支持的设备列表会持续更新和增加
精灵 PHANTOM 3 SE技术参数
参考技术A大疆精灵3的其他参数:
遥控器:工作频率:2.400GHz-2.483GHz
信号有效距离:2000米(开阔室外无干扰)
视频输出接口:USB
工作环境温度:0°C-40°C
电池:6000mAh锂充电电池2S
移动设备支架:适用于平板电脑或手机
接收灵敏度(1%PER):-101dBm±2dBm
等效全向辐射功率(EIRP):FCC:20dBmCE:16dBm
工作电流/电压:1.2A@7.4V
视觉定位系统:速度测量范围:飞行速度小于8米/秒(高度2米,光照充足)
高度测量范围:30厘米至300厘米
使用环境:地面有丰富纹理,光照条件充足(>15lux,室内日光灯正常照射环境)
相机:影像传感器:1/2.3英寸CMOS;有效像素1240万(总像素1276万)
镜头:FOV94°20mm(35mm格式等效)f/2.8;对焦点无穷远
ISO范围:100-3200(视频);100-1600(照片)
电子快门速度:8秒至1/8000秒
照片最大分辨率:4000x3000
照片拍摄模式:单张拍摄
多张连拍(BURST):3/5/7张
自动包围曝光(AEB):3/5张@0.7EV步长
APP/图传:lightbridge
移动设备App:DJI go
有效全向辐射功率:100mW
工作频率:2.4GHzISM
实时图传:720P@30fps(取决于实际拍摄环境及移动设备)
延时:220ms(取决于实际拍摄环境及移动设备)
移动设备系统要求:iOS8.0或更高版本;Android4.1.2或更高版本
电压:17.4V
额定功率:Phantom3Professional--100W、Phantom3Advanced--57W
电池容量:4480mAh
电压:15.2V
电池类型:LiPo4S
能量:68Wh
电池整体重量:365克
最大充电功率:100W

产品发布:
2015年8月5日,DJI大疆创新于晚上宣布推出面向入门级新飞手的“大疆精灵3标准版”(DJI Phantom 3 Standard)航拍无人机。
大疆精灵3标准版继承了“精灵”系列几款前作的高度稳定性、卓越飞行体验以及航拍画质,令航拍变得简单、便捷。在此基础上,其具备“智能飞行”功能、2.7K超高清机载相机以及平易近人的定价等亮点。
百度百科——大疆精灵3
参考技术B遥控器:工作频率:2.400GHz-2.483GHz
信号有效距离:2000米(开阔室外无干扰)
视频输出接口:USB
工作环境温度:0°C-40°C
电池:6000mAh锂充电电池2S
移动设备支架:适用于平板电脑或手机
接收灵敏度(1%PER):-101dBm±2dBm
等效全向辐射功率(EIRP):FCC:20dBmCE:16dBm
工作电流/电压:1.2A@7.4V
视觉定位系统:速度测量范围:飞行速度小于8米/秒(高度2米,光照充足)
高度测量范围:30厘米至300厘米
使用环境:地面有丰富纹理,光照条件充足(>15lux,室内日光灯正常照射环境)
相机:影像传感器:1/2.3英寸CMOS;有效像素1240万(总像素1276万)
镜头:FOV94°20mm(35mm格式等效)f/2.8;对焦点无穷远
ISO范围:100-3200(视频);100-1600(照片)
电子快门速度:8秒至1/8000秒
照片最大分辨率:4000x3000
照片拍摄模式:单张拍摄
多张连拍(BURST):3/5/7张
自动包围曝光(AEB):3/5张@0.7EV步长
定时拍摄
录像分辨率:Phantom3 Professional:UHD4096x2160p、3840x2160p
FHD1920x1080p HD1280x720p
Phantom3 Advanced:FHD1280x720p
HD1280x720p
支持存储卡类型:Micro-SD卡
(最大支持64GB容量,传输速度为Class10及以上或达到UHS-1评级的MicroSD卡)
APP/图传:lightbridge
移动设备App:DJI go
有效全向辐射功率:100mW
工作频率:2.4GHzISM
实时图传:720P@30fps(取决于实际拍摄环境及移动设备)
延时:220ms(取决于实际拍摄环境及移动设备)
移动设备系统要求:iOS8.0或更高版本;Android4.1.2或更高版本
支持的移动设:IOS:iPhone5s、iPhone6、iPhone6Plus、iPadAir、iPadAirWi-Fi+Cellular、 iPadmini2、iPadmini2Wi-Fi+Cellular、iPadAir2、iPadAir2Wi-Fi+Cellular、 iPadmini3及iPadmini3Wi-Fi+Cellular。
Android:SamsungS5、Note3、SonyXperiaZ3、GoogleNexus7II、GoogleNexus9、Mi3、NubiaZ7mini
充电器
电压:17.4V
额定功率:Phantom3Professional--100W、Phantom3Advanced--57W
智能飞行电池:容量:4480mAh
电压:15.2V
电池类型:LiPo4S
能量:68Wh
电池整体重量:365克
最大充电功率:100W
Phantom3 Standard
发布日期:2015年8月5日
价格区间:4799元(含2.7K镜头)
机身颜色:白色+红纹
模型类型:四旋翼飞行器
工作环境温度:0℃~40℃
起飞重量:<1216g
悬停高度:垂直+/-0.5米 水平+/-1.5米
最大上升速度:5m/s
最大下降速度:3m/s
最大水平飞行速度:16m/s
对角线距离(含桨):590mm
飞行时间:约25分钟
云台俯仰角:-90°至+30°
GPS模式:GPS定位模块

大疆精灵4多光谱无人机P4M影像辐射定标方法
前言
上一章《大疆精灵4多光谱无人机P4M影像辐射定标方法》重点给出了基于“光强校正法”的大疆P4M转换反射率的方法的代码(基于python),未对其原理和校正精度进行分析。本章结合最近采集的数据,对光传感器常见标定内容、光强校正法原理、如何获取P4M反射率(ASD相对于地物波谱仪)等内容进行梳理。
一、基础概念梳理
传感器辐射定标分相对辐射定标和绝对辐射定标两种,前者标定和纠正传感器不同探元间的相对响应差异,后者则是利用绝对参照体建立图像DN值(或灰度信息,一般是无具体物理意义的)与实际地物辐亮度的响应关系,将图像DN值转换成辐亮度、反射率等绝对地物信息(具有具体意义,如反射率信息)。相对辐射定标是提升遥感影像质量、获取标准遥感数据的关键步骤,也是各探元成像基准一致性的重要环节。
1.镜头暗电流
镜头暗电流:对于ccd或cmos传感器,其光电二极管是在反向电压下工作的,为了给电子增加动能,存在外接电源,也就是暗电流,有光时,光电子数量增加,光电流增强,弱光时,光电子数量减少,电流变弱。没有受到光照时,也会产生电流现象,称为暗电流效应。对传感器定标而言,该部分标定工作是不可缺少的。
P4M同样给出了暗电流的校正方法,只不过这里面给了一个均值。

2.镜头成像畸变
镜头成像畸变:一般来说,镜头畸变实际上是光学透镜固有的透视失真的总称,也就是因为透视原因造成的失真,这种失真对于照片的成像质量是非常不利的,但因为这属于透镜的固有特性(凸透镜汇聚光线、凹透镜发散光线),所以无法消除,只能改善或后期修正。
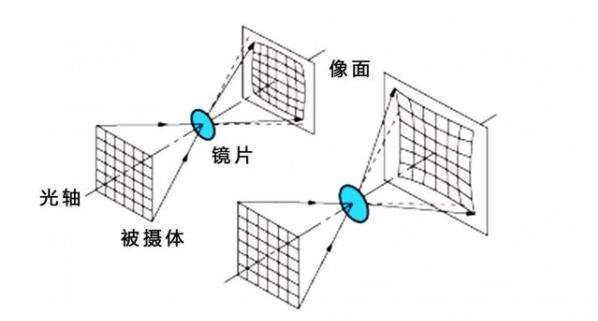
镜头畸变一般分:切向畸变、径向畸变和枕形畸变。
相关概念和示例图网上很多,这里不再陈述,仅列举几个参考资料:
1、什么是镜头畸变?如何矫正镜头畸变,合理利用镜头畸变?
2、镜头畸变现象及其校正方法
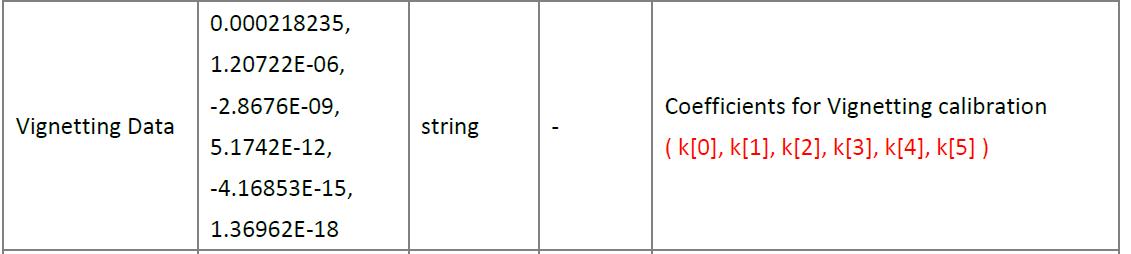
若想自己标定,可通过张正友校正法进行获取。幸运的是大疆P4M在出厂时已经给出了该部分的参数,可以在影像元数据信息(xmp)直接读取。
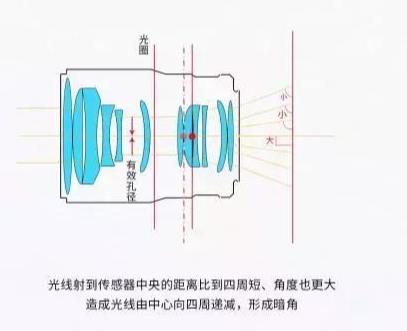
3.镜头暗角效应
当相机对着亮度均匀的目标进行数据采集时,影像四角有变暗的现象,称为为“暗角效应”,如下图所示。这种效应对于任何成像镜头都是不可避免的,仅是程度上的差异,与制作工艺、使用方法均有一定关系。
产生暗角的主要原因有:
一是镜头边角的成像光线与镜头光轴有一个较大的夹角,这是造成边角失光的主要原因。沿着视场边缘的光线的前进方向看光圈,由于光线与光圈所在的平面有夹角,看到的光圈是椭圆的,所以通光面积减小。镜头光心到胶片或CCD、COMS片的边缘距离较大,同样的光圈直径到达底片CCD、COMS片的光线夹角较小,亮度必然减小。同样道理,同样的光线偏角,对于边角光线位移就较大,等价于照在较大的面积上。而面积是与位移的平方成正比的,所以综合上述原因,边缘亮度与光线和光轴夹角的COS值的4次方成正比。换句话说,广角镜头边缘亮度是随着视角的变大它必然会急剧地下降。

示例:不同光圈下的暗角效应结果
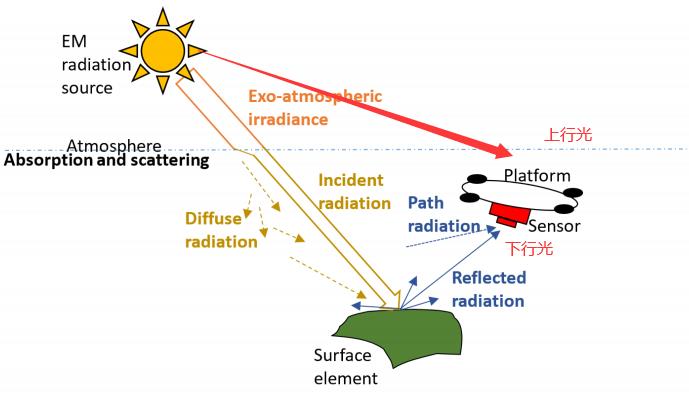
3.光强校正法原理及常见传感器
该方法是利用传感器接收下行入射光强(能量)与上行光入射光强(能量)的比值来实现反射率计算的。下行光强为地物反射光强,接收单位为各通道传感器;上行光强是入射光传感器接收的光强(示意图如下)。
最为典型多光谱传感器是Mini-mca6,目前已经停产。已有大量中英文相关文献,有兴趣的朋友可以查阅。
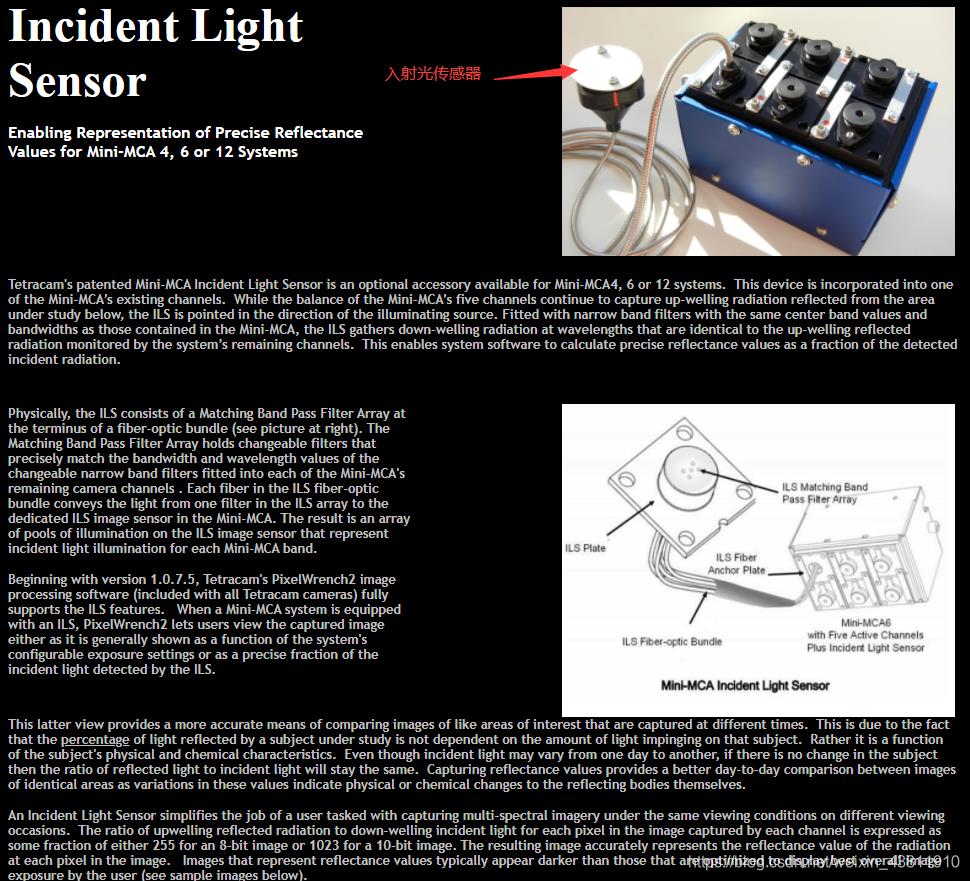
后期其他产品,诸如Sequoa、Redeage-m、Altum、MS600和大疆P4M等,也均配有入射光传感器,不同的是,后面的产品的光强信传输不再依赖于光纤。传感器的尺寸和重量也有了明显的改善。





二、反射率计算方法
1.基于光强校正法的反射率转换(以大疆P4M为例)
上文重点讲述了影像传感器信息采集精度的关键因素和光强校正法的基本原理,本节就以大疆P4M为例,具体说明大疆P4M是如何根据光强校正法实现ND值到反射率的转换的。实现过程均参考官方文档精灵 4 多光谱版 图像处理指南 v1.0若觉的本过程阐述有误,请详细查阅参考文档。
根据大疆官网文档描述,其各波段的反射率计算,均是以NIR波段为参考进行计算的。事实上早期的Mini-mca6同样是以某波段为基准进行量测设置了,这点原理是相同的。
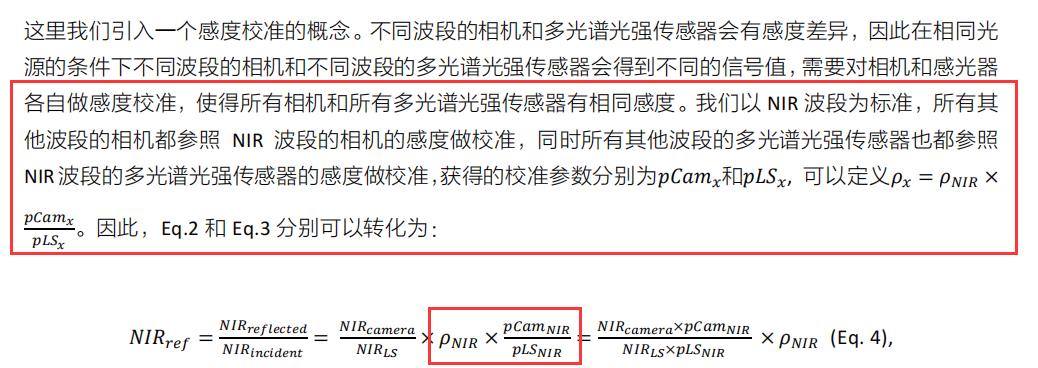
式中,NIRcamera表示NIR波段传感器获得的下行光入射能量,NIRdls表示其上行光也就是通过DLS获得的光能量。
NIRcamera信息获取:
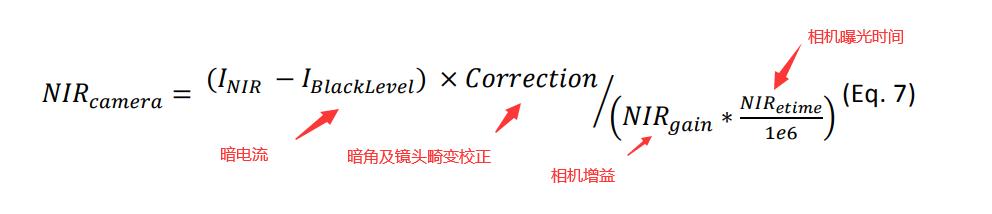
按处理文档种的公式,NIRcamera的获取,同步进行了暗电流、镜头畸变、镜头暗角效应三个关键参数的校正。
NIRdls信息获取:
在DLS信息获取方面,官方文档直接给出了相对基准波段(NIR)的值,存储与影像的元数据中。

本人已按其官方文档实现单张影像的相对辐射标定,需要的朋友可以参考大疆精灵4多光谱无人机P4M影像辐射定标方法
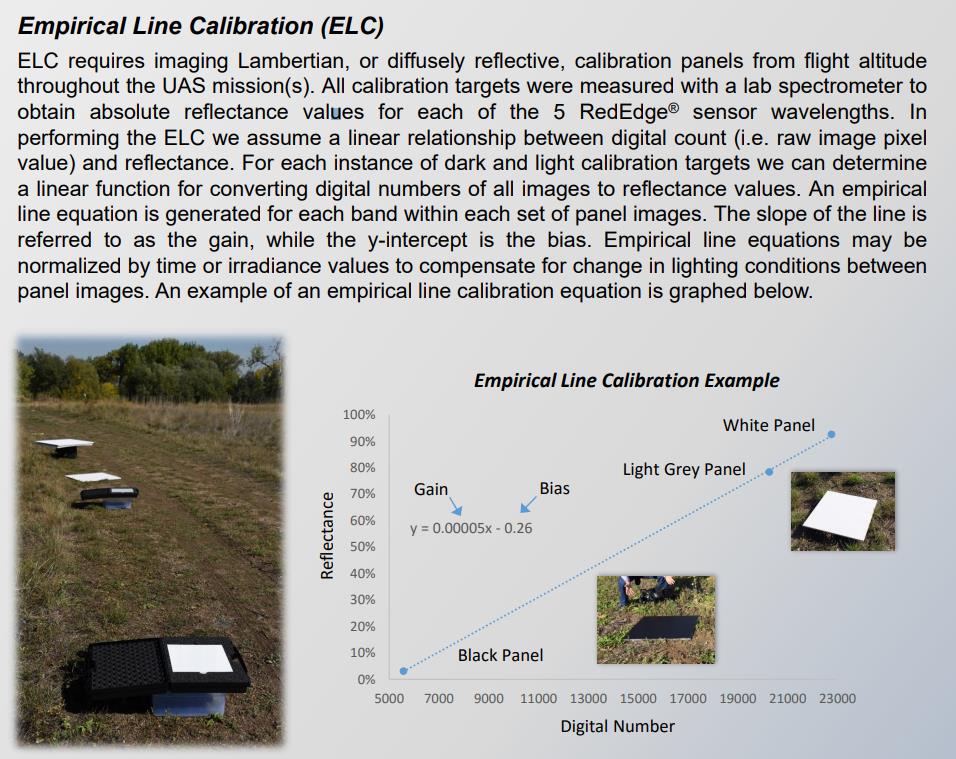
1.经验校正法
相对与光强校正法,经验线性校正法的原理较为简单。它是将影像上所选区域的光谱值与该区域所对应的实际测量的地面数据进行回归分析,得到一个加常数B和乘常数K,从而计算出该幅影像所对应的实际的地面反射率。地面实际值一般利用地物波谱仪(ASD)测量,常选用具有朗伯面性质物体,如标准定标布、标准定标版等作物地面基准。为了保证回归系数求解的正确性,一般会具有多个反射率梯度的基本物作为参考,以采集植被常用的定标毯为例,常见的组合定标毯为3-5个梯度,反射率范围5%-60%。需要注意的是,为了尽可能保证回归精度,在求解多光谱中心波长所对应的ASD测得的反射率时,尽可能用多光谱厂商提供的光谱响应函数求解,避免直接利用中心波长的反射率。
Y
=
K
x
+
B
Y =Kx+B
Y=Kx+B
原理相对简单,不再过多累述,下图为典型的经验校正法案例。
以上是关于大疆精灵3的其他参数的主要内容,如果未能解决你的问题,请参考以下文章