移动机器人+机械手臂+视觉定位抓取物料
Posted COCO_PEAK_NOODLE
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了移动机器人+机械手臂+视觉定位抓取物料相关的知识,希望对你有一定的参考价值。
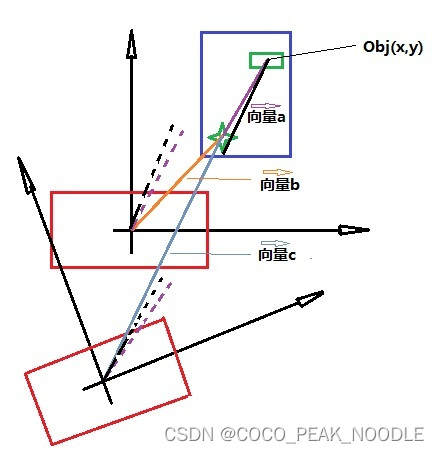
难点:因为移动机器人是移动的,所以机械手臂的基坐标系是变化的,所以在计算完偏移和旋转后,要考虑整体坐标系是移动的。
所以一般要用到二维平面转转平移公式:
参考文章:
https://blog.csdn.net/sss_369/article/details/90182696
一般平移比较简单,但是当AGV旋转后,但前手臂的坐标基准和之前标定的基准变化了,所以如果要移动到正确(抓取物料)的位置,要用当前的机械手臂基准下,标定时(抓缺物料)的位置,就要先平移,再计算旋转之后的坐标系位置(当前手臂基准下)。
注:基准==坐标系
坐标纠正原理图
以上是关于移动机器人+机械手臂+视觉定位抓取物料的主要内容,如果未能解决你的问题,请参考以下文章