双足轮机器人Ascento技术详解--摘要和引言系统描述翻译
Posted 灯哥开源
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了双足轮机器人Ascento技术详解--摘要和引言系统描述翻译相关的知识,希望对你有一定的参考价值。
摘 要
地面移动机器人在复杂室内环境应用时需要具有较高的速度以及机动性。这为移动机器人学带来了持续的挑战。一个具有以上特性的系统在机器人大范围的室内巡检任务中会很有用。这篇论文介绍了Ascento,一个可以在平坦地形快速移动的小型双足轮机器人,它能够通过跳跃来翻越障碍。本文给出了机械设计以及系统整体的结构,同样也给出了应对不同场景的多种控制器的开发。在最终的原型机进行了一系列实验,验证了这些行为在真实场景中的有效性。
Ⅰ 引言
过去十年来兴起的高性能移动机器人的研究推动了工厂的巡检机器人的发展[1]-[2]。尽管像无人机这样的飞行系统已经展现出了非常好的可操作性[3],它们在负载和飞行时间上却非常有限。可以快速移动并克服室内障碍的地面机器人仍然是待研究的话题,并且它们在策略上通常速度慢或者缺乏灵活性。
地面机器人的运动可以大致分为两个主要的类别;基于腿足的方法[4]-[8]或者基于轮子的方法[9]-[10]。同时,虽然一些用于室内空间的步行机器人在越过像楼梯或者较滑的地形时展现出了很好的性能,但是他们仍然花了大量的时间来执行这些复杂的运动。与此相反,具有转动部件(例如轮子)的机器人可以很好的适合平坦的地面,因为他们可以平滑、高效、快速地移动。然而,这些机器人通常无法处理粗糙不平的地形,特别是当障碍物比它们的轮子半径要大的时候。存在例外的是那些拥有履带的系统[11]。这些系统可以较容易地越过复杂的地形和小的障碍,但是由于滑动,其在转向移动时是不精准且低效的。
同时具有在平坦地面上快速平滑地移动以及动态跨越障碍的能力的机器人非常少。大部分的系统是仅考虑其中任意一个方面,忽视了另一方面的性能。
我们的目标是设计出一个室内机器人,结合了腿和轮子的性能,腿的多功能性可以通过跳跃越过障碍物,以及轮子可以在平坦地面快速高效移动。狭小的室内环境可能会要求机器人有较高的机动性。因此,这个系统必须要进行高度紧凑的设计。

当前结合了跳跃和行驶的系统,需要考虑的是,要么是牺牲可重复性来满足跳跃较高的高度[12]-[13],要么就是需要一个特别长的时间来复位他们的跳跃机构[14]。据作者所知,在[15]中呈现出来的系统设计是与Ascento机器人最为相似的。它为了这个目的高效地结合了腿和轮,但是它的大小使得它不适合室内的空间。在本文的工作中,我们描述了Ascento,一个小体型的两轮跳跃机器人,它特别适合室内的环境。它的结构部件是通过拓扑优化创建的,并且完全使用3D打印。一个最优化的腿部结构消除了行驶以及跳跃动作的耦合并且使得机器人可以从多种跌倒场景下恢复。稳定性和行驶是通过线性二次调节器(LQR)控制器来实现的。对于跳跃以及跌倒恢复策略,则是使用顺序前置反馈控制器。为了验证这个想法,实际样机在多个实验中表现出了稳定的行驶,跳跃以及跌倒恢复的能力。
本文三个主要的贡献可以总结如下:
(1)基于拓扑优化构建的具有平行弹性跳跃机构的双轮平衡机器人的机械设计结构。
(2)控制机器人的专用软件。
(3)在实际样机中进行了成功的实验验证评估。
此篇论文其余部分组成如下:在章节Ⅱ,我们描述了系统的机械设计结构并列出了整体硬件清单。在章节Ⅲ,给出了这个系统模型的一个简易轮廓来进行基于模型的控制。在章节Ⅳ中,给出了对于系统控制架构的解释,并着重介绍了稳定控制(Ⅳ-A),跳跃控制(Ⅳ-B),跌倒恢复的控制策略(Ⅳ-C)。在章节Ⅴ中给出了对于真实世界的实验验证评估。我们在章节Ⅶ的总结之前,进一步地在章节Ⅵ中列出了机器人正在开发的功能特性。
Ⅱ 系统描述
A. 机械结构设计
所示的系统包括两条末端具有驱动轮的腿。所有的电子器件安装在图1中的身体上,腿部则与机器人身体连接。每条腿可通过驱动对应的安装在机器人身体髋关节的电机来独立地伸长以及缩短。通过这样的方式,系统的总体高度可以在31厘米和66厘米之间调节。腿部机械结构设计的目标是尽可能对稳定性以及跳跃控制进行解耦。这是通过一个三连杆机构实现的,它使得轮子可以垂直于地面作近似线性的运动,如图2所示。通过让这条绿色线段通过系统的质心,腿部运动得以在执行跳跃轨迹时,不会导致身体旋转。由于这种机械结构不能达到完美的直线[16],这些连接装置经过了数值上的优化,通过对六个几何设计参数使用均方误差来逼近最佳的线性轨迹,以此来获得连杆的最佳的长度与角度。
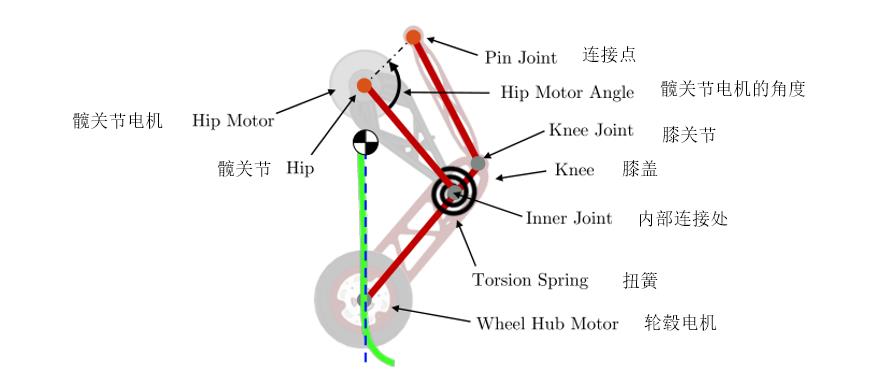
通过机器人质心的蓝色虚线描绘的是最佳的线性运动,而所到达的最优化运动通过绿色线段描绘出来了。
为了减少质量并且增加系统的强度,腿部的组成成分受到几何的启发使用拓扑优化方法[17]来进行设计。拓扑优化是一种数值方法,通过给定负载、设计空间、边界条件和目标质量的集合找到一个几何结构,使得结构所受的压力最小。原始拓扑优化的结构对于后续处理步骤以及像有限元分析(FEM)这样的数值分析法是不现实的。因此,使用优化的结构作为模板,手动重新设计了该结构。由于最优化部分的复杂形状,通过传统的制造过程制造它们较有挑战性。因此,所有的结构部分是使用尼龙12(PA12)通过选择性激光烧结(SLS)技术3D打印出来的。这个技术也使得快速的原型迭代成为可能。
为了提供平滑稳定的性能,并且抵消系统倾斜角度的干扰,需要消除齿轮间隙以及具有较高的轮子力矩。为了达到这个目的,制造了装配定制轮子的无框轮毂电机。这种直驱的结构可基本达到无齿隙运动且十分紧凑。将扭簧像图2所示安装在内关节来抵消系统自重并减少髋关节电机在行驶或站立时控制所需的代价,提升整体的效率和跳跃高度。
B. 硬件
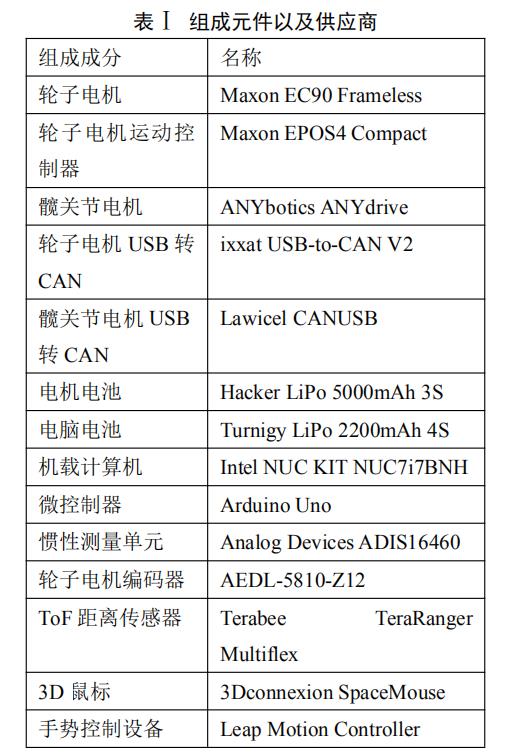
其余硬件的选择是基于最好的满足系统的性能所需。为了跳跃以及能够抵消扭簧,当系统离开地面时,髋关节电机需要较高的力矩。为了这个目的,我们使用了ANYdrive[4]的弹性制动器。它们能够传递最高达到40牛米的力矩并且有内置的位置和力矩控制。在轮毂电机上使用了最大力矩为3.5牛米的Maxon EC90无框电子整流(EC)电机。每一个轮毂电机装有一个编码器来获取准确的位置以及速度反馈,并且需要一个额外的运动控制器来进行力矩控制。四个电机的通讯都通过一个控制器局域网(CAN)并且使用一个转换器来与机载计算机通讯。使用拥有i7处理器的英特尔NUC作为主要的计算单元,进行整个系统的控制。系统也安装了一个惯性测量单元(IMU)和一个微控制器来使得IMU与电脑之间可以进行通讯。两个使用飞行时间技术(ToF)的距离传感器安装在轮子两侧,用于跳跃触发。为了给所有电机供电,将四个三芯锂聚合物(LiPo)电池组合到一个电池包来供电。机载计算机和其余的电子设备则是使用一个四芯的锂聚合物电池供电。表Ⅰ展示了一个完整的组件清单。
作为一个整体,这个系统重10.4公斤,并且拥有接近1.5小时的续航时间。
C. 软件
相关的控制软件必须有较高的计算效率来驱动高带宽的控制器,因此所有的软件都是使用C++编写的。此外,在高层通讯上使用机器人操作系统(ROS)的框架。对于IMU和电机编码器所测量得到的数据进行了卡尔曼滤波。结合从Ⅲ-C中得到的模型认知,卡尔曼滤波器根据髋关节电机位置提供了对于系统状态的估计,这在Ⅳ-A中进行了描述。估计的状态信息以及用户输入的期望的位姿信息一起作为控制器的输入,如图3所示。用户输入既可来自一个3D鼠标,也可来自一个手势控制设备[18],来进行简单而直观的操控。控制框架中包括稳定性、跳跃、倒地恢复控制以及一个高级的位置控制。由于最优化的腿部几何结构,跳跃和行驶操作可以被看作是解耦的,从而可以独立控制。稳定性控制器计算并发送力矩命令来驱动轮子电机。同样的,跳跃和倒地恢复控制器对于髋关节电机以及轮子电机进行完全的控制。

双足轮开源技术交流QQ群:543613782
参与翻译者:灯哥开源团队,华侨大学华机战队
原文论文: A Two-Wheeled Jumping Robot ——Victor Klemm∗, Alessandro Morra∗, Ciro Salzmann∗, Florian Tschopp, Karen Bodie,Lionel Gulich, Nicola Küng, Dominik Mannhart, Corentin Pfister, Marcus Vierneisel,Florian Weber, Robin Deuber, and Roland Siegwart,2019 ICRA
以上是关于双足轮机器人Ascento技术详解--摘要和引言系统描述翻译的主要内容,如果未能解决你的问题,请参考以下文章