地面监视雷达系统的设计与试验
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了地面监视雷达系统的设计与试验相关的知识,希望对你有一定的参考价值。
本文主要介绍地面监视雷达系统的组成和设计。
一、 功能和性能指标
XD-5000 型地面监视雷达是一款小型一维相控阵雷达,可用于边境监视,输油管线保护,单兵便携战场侦查等场景。该雷达具有以下特点:
监视范围广:对行人的探测距离≥5Km,对车辆探测距离≥10Km,方位覆盖范围为 90°。
环境适应性强:雷达具有在线学习功能,能适应各种环境的变化。最小可检测探测速度低:可检测速度低至 0.3m/s 的目标。
探测精度高:距离精度<5m,方位精度<0.5°。
自动化程度高:运用先进的 TBD(检测前跟踪)的算法,检测与跟踪同时进行,无需操作员手动跟踪。
具备目标分类识别功能:运用 AI 模式识别算法,可区分目标的类型。
体积小,重量轻,功耗低:采用集成化设计理念,雷达重量<6Kg,功耗< 65W,架设和撤收方便。可适用于单兵便携侦查、太阳能供电等场景。
可靠性高,成本低:雷达无转动部件,较机械扫描雷达的可靠性大大提高。但成本仅与机械扫描雷达相当。
雷达的技术指标如下:
- 探测距离(Pd≥0.9,Pfa<1e-9):≥5Km(行人,RCS=0.5 ㎡),≥10Km
(小型车辆,RCS=5 ㎡);≥2.5Km(无人机,RCS=0.01 ㎡)
- 频段:Ku 波段;
- 方位覆盖范围:90°;
- 盲区:50 米;
- 距离分辨力:10 米;
- 探测精度:距离<5m,方位<0.3°;
- 最小可检测速度:≤0.3m/s;
- 最大跟踪目标速度:≥60m/s;
- 同时跟踪目标批数:大于 100 批;
- 重量:≤6Kg;
- 供电:18~28VDC,功耗<65W;
二、 系统组成
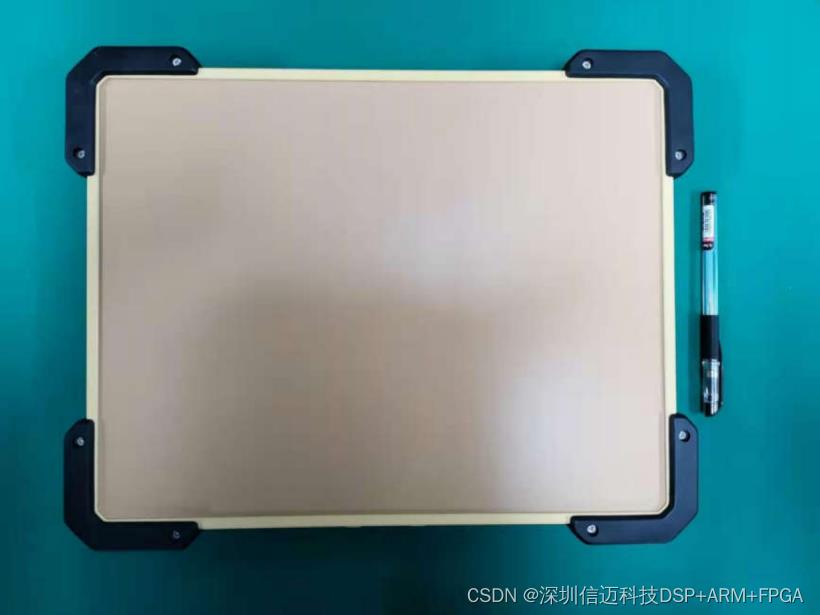
系统由雷达主机、电源适配器、配套电缆、显控终端(可选)、配套安装结构组成。
雷达主机完成对目标的探测、跟踪、信息获取,通过千兆网口将目标信息传输到显控终端。显控终端将雷达输出的目标信息通过人机交互界面显示,还可对雷达工作参数进行配置。电源适配器负责将 AC220V 电压变换成雷达所需的直流电压。配套电缆共计 2 条,一条为供电电缆,一条为网络通信电缆。配套安装结构可根据客户的安装载体进行定制,以适应客户不同场景的安装需求。雷达主机的外观如图所示:
系统组成表:
| 部件名称 | 数量 |
| 雷达主机 | 1 |
| 供电电缆 | 1 |
| 网络通信电缆 | 1 |
| 电源适配器 | 1 |
| 显控终端(可选) | 1 |
| 配套安装结构 | 1 |
三.工作流程
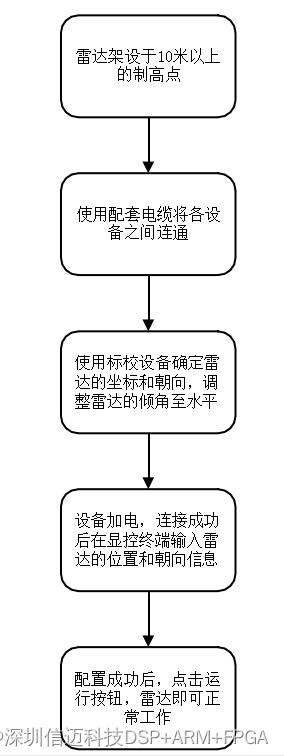
雷达架设于离地高度 10 米以上的制高点,确保雷达与被监测区域之间通视无遮挡。使用标校设备,对雷达架设进行配平,并确定雷达架设地点的坐标及雷达朝向。
将相应的设备使用配套电缆与雷达连接。雷达主机通电开机后,主机可自动与显控终端进行网络连接。此时将雷达的坐标及阵面指向输入至显控软件,点击运行按钮,雷达即可正常工作,显控界面上即可显示视野内所有运动目标的的航迹和信息。
工作流程总结如下:
四、结构和接口
主机结构正视图:

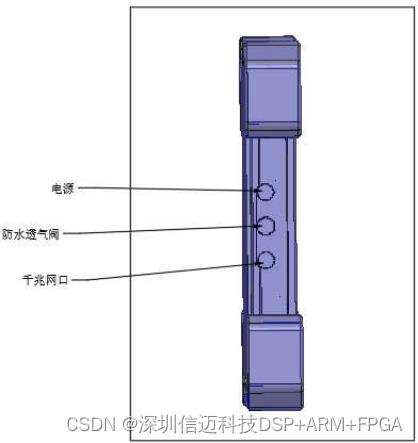
结构侧视图:
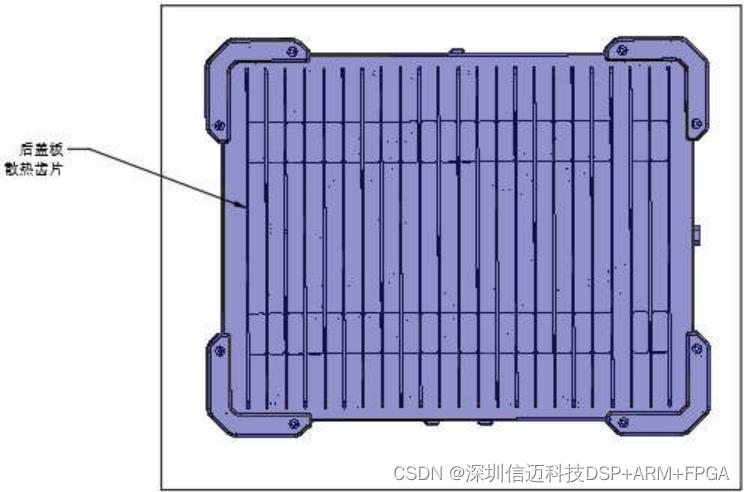
结构背视图:
雷达的供电电压为 18~28VDC,通讯接口为千兆网络接口。供电和通讯接口分别通过两个防水航空插头引出。
五、产品部分场景测试效果图
外场实验照片

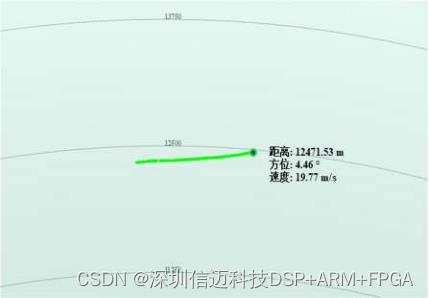
部分场景测试效果

人形目标,2.6 公里处以 20m 为半径做圆周运动

人形目标,4.8 公里处田野里走动
公路上的车辆目标
以上是关于地面监视雷达系统的设计与试验的主要内容,如果未能解决你的问题,请参考以下文章