神经网络自整定PID真的有效吗?我看图书馆的参考书上和知网论文上的方法,感觉推导过程都不对啊?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了神经网络自整定PID真的有效吗?我看图书馆的参考书上和知网论文上的方法,感觉推导过程都不对啊?相关的知识,希望对你有一定的参考价值。
难道都是伪造数据吗?很怀疑啊,或者说是我没理解错了
有没有人亲自实验成功过BP-PID?或者其他RBF-PID什么的都行。。。。
问题就出在一点:
yout(k)和被控对象的输入控制量U之间的关系没法定义。。书上直接用的yout=f(delta_u)近似代替(括号里是控制量U的增量delta_u),这根本讲不通啊,yout(k)每个值怎么可能只跟delta_u有关呢?至少得有:
yout=f(delta_u,yout(k-1))才行啊,甚至得有yout=f(U,delta_u,yout(k-1))才更好呢
形参直接关系到:后续的梯度下降(实质就是个多层复合函数求偏导)的推导公式。
有没有同行专家来讨论下?
我个人也做了一些这样的研究,感兴趣的话可以参考我的一篇期刊论文。
Data-Driven Tracking Control Based on LM and PID Neural Network with Relay Feedback for Discrete Nonlinear Systems 参考技术A 没研究过神经网络,但看你的描述,是不是第一段讲的是输入控制到输出的开环增益?而你第二段的理解是整个闭环控制回路的函数?建议你再看看你查的文献上有没有相关描述。 参考技术B 从理论上神经网络PID自整定算法没有问题:
自学习过程主要学习网络的权值矩阵,由于输入节点和输出节点的误差传到关系已经被PID算法确定,在学习速度不是很快的情况下,系统一定能够学习收敛,能够找到所需的PID参数。追问
你有做好的simulink模型吗?我想看看它的运作过程
参考技术C 建议查看英文文献,中文的善用公式,英文的一般比较好懂 参考技术D 本人可以做,可以私下交流。基于步进电机的电动执行器参数自整定及轨迹控制研究
电动执行器定位控制在生产生活中具有广泛的应用,在使用搭载步进电机的电动执行器进行定位控制的时候,定位系统的定位精度和响应波形,会随着负载质量的变化而变化,这是由电动执行器核心部件步进电机本身特性引起的。两相混合式步进电机作为应用最广泛的步进电机,在负载过大的时候,会出现丢步或失步的现象;在相同负载下,转速过高时会出现无法正常启动的现象。为了改善搭载步进电机电动执行器的控制效果,需要对步进电机的特性进行深入了解,需要对电动执行器的控制参数进行整定,仍采用固定的控制参数,将无法应对干扰剧烈的工作环境。
本文首先介绍了电动执行器的发展历史以及其相比于气动执行器的优缺点。对控制参数自整定方法的国内外研究状况进行了整理综述。同时,对插值轨迹规划的理论方法以及研究状况进行了总结。
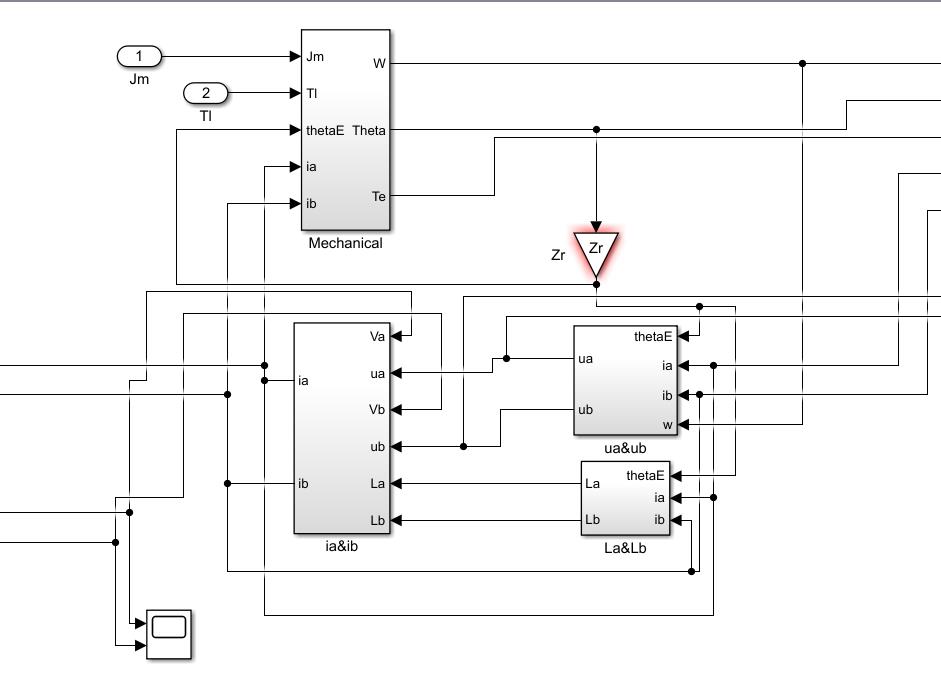
然后,本文介绍了电动执行器核心部件步进电机的基础知识,包括其分类、工作原理以及基本特性等。分析了步进电机的驱动技术。给出了精确简洁的两相混合式步进电机的数学模型推导。利用步进电机的数学模型,连接了基于simulink的电动执行器仿真模型,进行了仿真分析,并通过电动执行器开环控制实验进行验证。
随后,本文研究了电动执行器位置闭环控制的原理,建立了电动执行器位置闭环控制实验平台,并给出了位置闭环控制的控制算法与实现方式。最后通过大量不同工况下的实验进行验证。
在电动执行器位置闭环实验的基础上,本文继续研究了模型参考自适应控制理论。基于该思想理论基础,研究了电动执行器控制参数自整定的实验原理以及控制算法。随后,在电动执行器位置闭环控制的基础上增加利用速度状态判断运行状态的控制环节,完成电动执行器控制参数自整定控制,并进行相关实验验证。
最后,本文研究了线性插值轨迹规划理论,对典型曲线进行了线性插值轨迹规划。并基于电动执行器控制参数自整定方案,进行了双轴电动执行器轨迹跟踪控制的相关实验。
本文主要研究了电动执行器变负载工况时的控制参数自整定控制。基于模型参考自适应理论,立足于步进电机的基本特性,采用了位置闭环和速度状态反馈的控制方式,实现了较好的定位效果和轨迹跟踪效果。主要完成任务如下:
- 全面地介绍了电动执行器核心部件步进电机的原理、分类和基本特性。推导出了完善的两相混合式步进电机的数学模型,并给出了较为合理完整的电动执行器控制系统的仿真模型,进行了相关仿真分析。
- 基于模型参考自适应理论,给出了适用于电动执行器这种非线性时滞系统的参数自整定方法,提出了利用速度状判断运动状态进而调整控制参数的控制方法。
3、搭建了电动执行器参数自整定控制实验平台。完成了实验台的设计、装备、调试、实验与维护工作。进行了基于Labview的数据采集用户操作系统的开发,编辑了PLC自整定控制梯形图。进行了不同负载不同工况下的大量实验,并进行了数据分析,达到了控制参数自动整定的效果,保证了很高的定位精度要求。
4、基于电动执行器控制参数自整定的控制方法和实验平台,对典型曲线进行了轨迹规划,并进行了实际曲线的跟踪实验,完成了双轴电动执行器轨迹跟踪控制。
电动执行器参数自整定控制以及双轴电动执行器轨迹跟踪控制领域还有许多可以挖掘的东西,作者完成的工作只解决了实际工作中遇到的一小部分问题,结合已结完成的工作和对该课题的理解,作者认为还可以从以下几个方面对该课题进行深入研究:
1、可以完善控制参数自整定策略,将参数调整机制进行细化,实现微小扰动的参数调整。可以增加控制平台的示教功能,解决实际应用中的便利性问题。
2、在轨迹跟踪控制中,可以进行对任意曲线的跟踪控制。可以尝试增加系统曲线自动辨识规划的功能,达到只要输入要跟踪的曲线方程,就可以自动完成轨迹规划和轨迹跟踪控制的效果。



qq:1762016542
以上是关于神经网络自整定PID真的有效吗?我看图书馆的参考书上和知网论文上的方法,感觉推导过程都不对啊?的主要内容,如果未能解决你的问题,请参考以下文章