Ubuntu 18.04/20.04 CV环境配置(下)--手势识别TRTpose+Kinect DK人体骨骼识别
Posted Techblog of HaoWANG
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Ubuntu 18.04/20.04 CV环境配置(下)--手势识别TRTpose+Kinect DK人体骨骼识别相关的知识,希望对你有一定的参考价值。


https://github.com/Alex1114/TRT-Pose-ROS https://github.com/Alex1114/TRT-Pose-ROS
https://github.com/Alex1114/TRT-Pose-ROS
 https://github.com/NVIDIA-AI-IOT/trt_pose
https://github.com/NVIDIA-AI-IOT/trt_posehttps://github.com/NVIDIA-AI-IOT/trt_pose_handhttps://github.com/NVIDIA-AI-IOT/trt_pose_hand
目录
1.3 编译& install ROS TRT hand Pose PKG
1. 编译安装TRT Pose
1.1 安装依赖
安装 torch2trt
git clone https://github.com/NVIDIA-AI-IOT/torch2trt
cd torch2trt
sudo python3 setup.py install --plugins
安装其他支持包
sudo pip3 install tqdm cython pycocotools
sudo apt-get install python3-matplotlib1.2 编译安装TRT Pose
git clone https://github.com/NVIDIA-AI-IOT/torch2trt
cd torch2trt
python setup.py install
# 加上pulgin会失败
pip install tqdm cython pycocotools
sudo apt-get install python3-matplotlib
git clone https://github.com/NVIDIA-AI-IOT/trt_pose
cd trt_pose
python setup.py install
# 安装jupyter lab
pip install jupyterlab
cd tasks/humanpose
jupyter lab
# 然后可以运行demo了1.3 编译& install ROS TRT hand Pose PKG
- Build and Install ros_trt_pose package
catkin build
source install/local_setup.sh2 测试使用
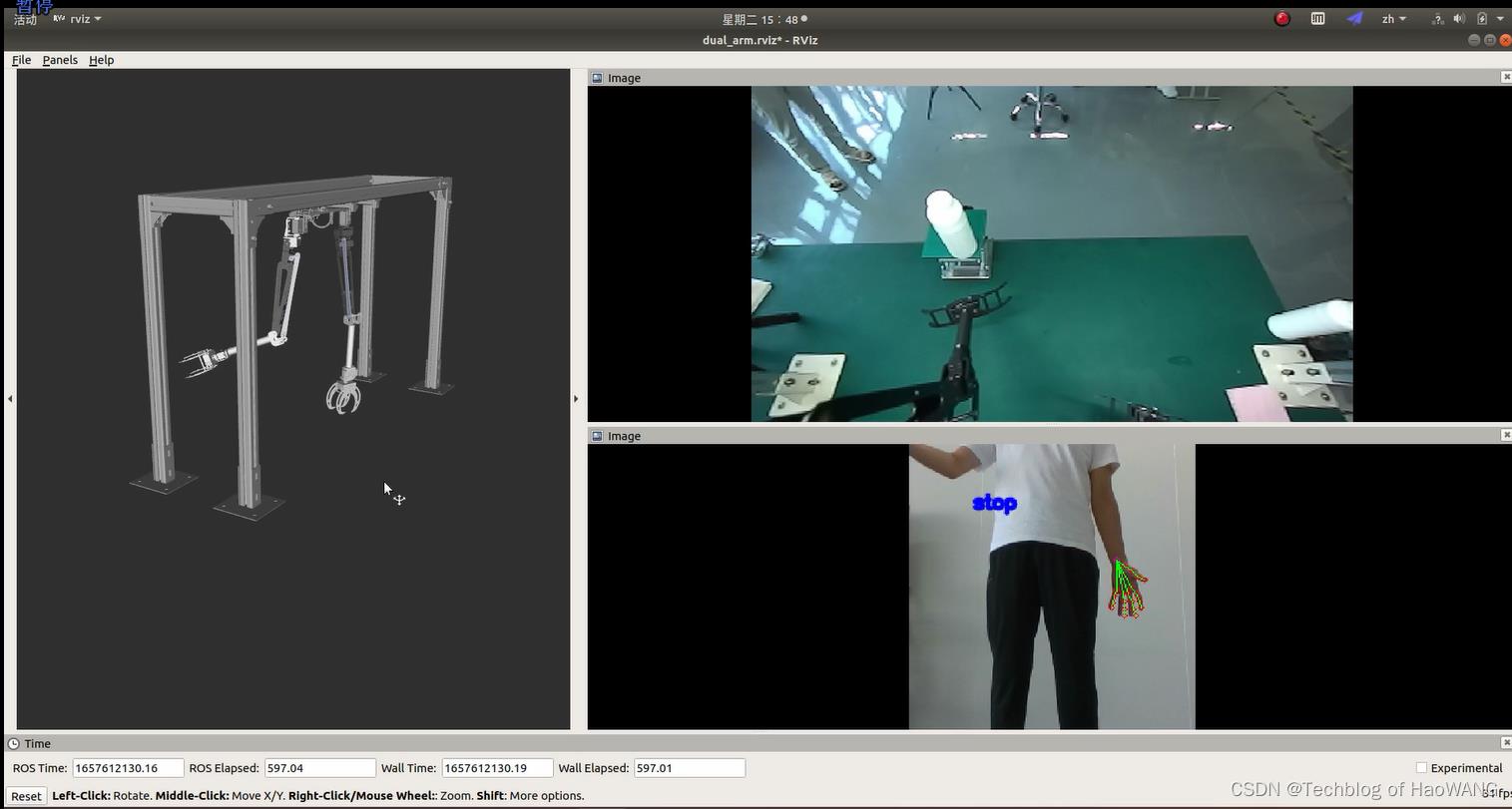
硬件:realsense 435i + kinect DK + PC
Hand gesture recoginition (hand pose classification)
roslaunch trt_pose_hand trt_gesture_classification.launch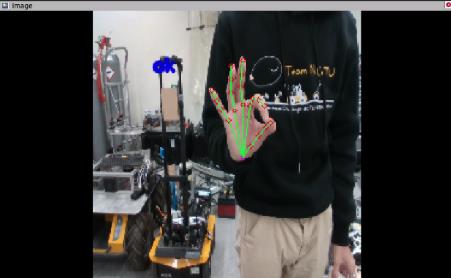
3. 集成调试
./auto_start.sh
#!/bin/bash
# ALL Right reserved HAO,WANG
# @autor: haowanghk@gmail.com
# @time: 2022-07-04-10:52
# @position: JIhualab,China
# aim to launch realsense and hand pose TRT NVIDAIA Engine
# Master node has auto stated in dual_arm robots computer
# 1. load the cv_bridge pkg for python3.6
# Master node is in dual_arm robots
# launch k4a and k4abt and node transfer
# 打开终端窗口
gnome-terminal --tab --title="TRT Hand Pose" -- bash -c "cd /home/haowang/catkin_ws/install/;
source setup.bash;
source setup.bash;
roslaunch trt_pose_hand trt_gesture_classification.launch;exec bash" &
sleep 1.5
echo "-----TRT and Realsense Driver controller node starting Success!--"
gnome-terminal --tab --title="roslaunch k4abt" -- bash -c "roslaunch azure_kinect_ros body_skeleton_detection.launch;exec bash" &
sleep 1.5
echo "-----K4a devices and k4abt node with RVIZ starting Success!--"
gnome-terminal --tab --title="rosrun rqt control cmd " -- bash -c "rqt;exec bash" &
sleep 1
echo "-- RQT Node starting Success!--"
gnome-terminal --tab --title="ROS ZED Camera HTTP Web Server " -- bash -c "rosrun web_video_server web_video_server;exec bash" &
sleep 1
echo "-- ROS HTTP Web Server has started!--"
wait
exit 0
~ 测试结果(工程代码不开源)

以上是关于Ubuntu 18.04/20.04 CV环境配置(下)--手势识别TRTpose+Kinect DK人体骨骼识别的主要内容,如果未能解决你的问题,请参考以下文章
Ubuntu 18.04/20.04 CV环境配置(中):Tensorrt + Pytorch安装配置
Ubuntu 18.04/20.04 CV环境配置(中):Tensorrt + Pytorch安装配置
Ubuntu 18.04/20.04 CV环境配置(上):CUDA11.1 + cudnn安装配置
Ubuntu 18.04/20.04 CV环境配置(上):CUDA11.1 + cudnn安装配置