MATLAB基础问题
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了MATLAB基础问题相关的知识,希望对你有一定的参考价值。
num=[2 8 6];den(1 8 16 6);G6=tf(num,den)
Error: Missing MATLAB operator.
照书上打的 ,为什么书上的就能出结果我的就不能。。。
var=[num1 num2 num3....]; 所以den应该是den=[];
坑人的书啊!
>>num=[2 8 6];
>> den=[1 8 6 16];
>> G6=tf(num,den)
G6 =
2 s^2 + 8 s + 6
----------------------
s^3 + 8 s^2 + 6 s + 16 参考技术A 对头
>> num=[2 8 6];den=[1 8 16 6];G6=tf(num,den)
G6 =
2 s^2 + 8 s + 6
----------------------
s^3 + 8 s^2 + 16 s + 6
Continuous-time transfer function. 参考技术B den(1 8 16 6);有问题。
零基础使用 MATLAB 求解偏微分方程(建议收藏)
零基础使用 MATLAB 求解偏微分方程(建议收藏)
文章目录
偏微分开源工具介绍
百分之九十以上的重要的工程和数学科学研究,和偏微分方程都脱不开关系。在所有的偏微分方程中,百分之九十九都是没有解析解的。没有解析解怎么办,我们只能通过有限元或者有限差分等方法,求解偏微分方程数值解。如果您有一些代码基础,建议参考我的几篇有限经典博文,简单问题可在此基础上进行修改。
有限元方法入门:有限元方法简单的一维算例
有限元方法入门:有限元方法简单的二维算例(三角形剖分)
有限元方法入门:有限元方法简单的二维算例(矩形剖分)
对于做工程的朋友,不会偏微分方程数值解,怎么办?没关系,我推荐一些求解各类偏微分方程的容易入门的开源的软件包和工具,它们是:
- Free FEM++(足够傻瓜又不失自由度,强烈建议做工程的朋友可以学习一下)
- FEniCS(C++/Python, 开始于芝加哥大学和查尔姆斯理工大学)
- PETSC (C/Python, 美国阿贡国家实验室)
- deal.II (C++, 开始于德国海德堡大学)
- MFEM (C++, 美国劳伦斯利弗莫尔国家实验室)
- PHG (C, 张林波, 中国科学院)
- AFEPACK (C++, 李若, 北京大学)
- FEALPy(Python,魏华祎,湘潭大学)
- IFEM (MATLAB, 陈龙, UCI)
- NGSolve(C++/Python,Christoph 等)
- PHOEBESolver( Fortran and C/C++,宁夏大学,葛永斌)
[1]: GCGE(C/MATLAB,中国科学院,谢和虎,特征值求解) - ……
当然,商业有限元软件 ansys 等,也非常推荐学工程的朋友去学习,如果要深挖算法的,建议还是用开源的。
好,有的同学说,这些对你们来说还是太难了。没关系,我可以祭出大招:MATLAB PDE工具箱。为什么它比上面的简单呢?主要是因为,它有可视化的 GUI 工具,你实在不会写代码,你用鼠标点点,也能 “写” 出像模像样的代码。
PDE 工具箱函数汇总介绍
PDE 工具箱包含比较多的工具,典型的几个函数如下所示。
% 偏微分方程工具箱
%
% 使用结构化的工作流定义和求解 PDEs
% createpde - 创建 PDE 分析模型
% geometryFromEdges - 从 DECSG or PDEGEOM 创建 2D 几何图形
% importGeometry - 从 STL 文件创建 3D 几何图形
% geometryFromMesh - 从三角网格创建几何图形
% multicuboid - 组合立方体胞单元创建 3D 几何图形
% multicylinder - 组合若干柱状胞单元创建 3D 几何图形
% multisphere - 组合若干球单元创建 3D 几何图形
% addVertex - 在几何区域边界上添加一个顶点
% specifyCoefficients - 指定区域和或者子区域的 PDE 系数
% applyBoundaryCondition - 给几何区域施加边界条件
% setInitialConditions - 设定 PDE 初始条件
% generateMesh - 从几何生成一个网格
% solvepde - 求解 PDE
% solvepdeeig - 求解 PDE 特征值问题
% assembleFEMatrices - 组装中间的有限元矩阵
% createPDEResults - 创建一个用于后处理的结果对象
% pdegplot - 绘制 PDE 几何表示
% pdemesh - 绘制 PDE 网格
% pdeplot - 绘制二维 PDE 网格和结果
% pdeplot3D - 绘制 3D PDE 网格和结果
% interpolateSolution - 在指定的空间位置插入解
% evaluateGradient - 在指定的空间位置评估解的梯度
% evaluateCGradient - 评估 PDE 解的通量
%
% 使用热模型解决以传导为主的传热问题
% thermalProperties - 为热模型指定材料的热属性
% internalHeatSource - 指定热模型的内部热源
% thermalBC - 指定热模型的边界条件
% thermalIC - 设置热模型的初始条件或初始猜测
% solve - 求解热模型中指定的传热问题
% interpolateTemperature - 在任意空间位置的热结果中插入温度
% evaluateTemperatureGradient - 评估热解在任意空间位置的温度梯度
% evaluateHeatFlux - 在节点或任意空间位置评估热解的热通量
% evaluateHeatRate - 评估垂直于指定边界的综合热流率
%
% 使用结构模型解决静态、模态和瞬态线性弹性问题
% structuralProperties - 为模型分配结构材料属性
% structuralBodyLoad - 将体载荷应用于结构模型
% structuralBoundaryLoad - 在几何边界上施加结构载荷
% structuralBC - 将边界条件应用于结构模型
% structuralIC - 设置初始位移和速度
% structuralDamping - 为结构模型指定比例阻尼参数
% solve - 求解 StructuralModel 中指定的结构模型
% evaluateStress - 评估节点位置的应力
% evaluateStrain - E评估节点位置的应变
% evaluateVonMisesStress - 评估节点位置的 von Mises 应力
% evaluatePrincipalStrain - 计算节点位置的主要应变
% evaluatePrincipalStress - 计算节点位置的主应力
% evaluateReaction - 评估边界上的反作用力
% interpolateDisplacement - 在指定的空间位置插入位移
% interpolateVelocity - 在指定的空间位置插入速度
% interpolateAcceleration - 在指定的空间位置插入加速度
% interpolateStress - 在指定的空间位置插入应力
% interpolateStrain - 在指定的空间位置插入应变
% interpolateVonMisesStress - 在指定空间位置内插 von Mises 应力
%
% 使用非结构化工作流程求解 PDE
% adaptmesh - 自适应网格生成和 PDE 解
% assema - 组装面积积分贡献
% assemb - 组装边界条件贡献
% assempde - 组装 PDE 问题
% hyperbolic - 解决双曲线问题
% parabolic - 解决抛物线问题
% pdeeig - 解决特征值 PDE 问题
% pdenonlin - 解决非线性 PDE 问题
% poisolv - 矩形网格上泊松方程的快速解
%
% 用户界面算法和实用程序
% pdecirc - 画圆
% pdeellip - 绘制椭圆
% pdemdlcv - 转换 MATLAB 4.2c 模型 MATLAB 文件以与 MATLAB 5 一起使用
% pdepoly - 绘制多边形
% pderect - 绘制矩形.
% pdeModeler - PDE Modeler 图形用户界面 (GUI)
%
% 几何算法
% csgchk - 检查几何描述矩阵的有效性
% csgdel - 删除最小区域之间的边界
% decsg - 将构造实体几何分解为最小区域
% initmesh - 构建初始三角形网格
% jigglemesh - 抖动三角形网格的内部点
% pdearcl - 参数化表示和弧长之间的插值
% poimesh - 在矩形几何体上制作规则网格
% refinemesh - 细化三角形网格
% wbound - 写入边界条件规范数据文件
% wgeom - W写入几何规格数据文件
%
% 绘图函数
% pdecont - 等高线图的速记命令
% pdegplot - 绘制 PDE 几何
% pdemesh - 绘制 PDE 三角形网格
% pdeplot - 通用 PDE 工具箱绘图函数
% pdesurf - 曲面图的速记命令
%
% 实用算法
% dst - 离散正弦变换
% idst - 逆离散正弦变换
% pdeadgsc - 使用相对容差标准挑选坏三角形
% pdeadworst - 选择相对于最差值的坏三角形
% pdecgrad - 计算 PDE 解的通量
% pdeent - 与给定三角形集相邻的三角形的索引
% pdegrad - 计算 PDE 解的梯度
% pdeintrp - 将函数值插入到三角形中点
% pdejmps - 适应的误差估计
% pdeprtni - 将函数值内插到网格节点
% pdesde - 与一组子域相邻的边的索引
% pdesdp - 一组子域中的点索引
% pdesdt - 一组子域中的三角形索引
% pdesmech - 计算结构力学张量函数
% pdetrg - 三角形几何数据
% pdetriq - 测量网格三角形的质量
% poiasma - 泊松方程的边界点矩阵贡献
% poicalc - 矩形网格上泊松方程的快速解
% poiindex - 矩形网格的规范排序点的索引
% sptarn - 求解决广义稀疏特征值问题
% tri2grid - 从 PDE 三角形网格插值到矩形网格
%
% 用户定义的算法
% pdebound - 边界 MATLAB 文件
% pdegeom - 几何 MATLAB 文件
%
% 对象创建函数。这些函数不是直接调用的。
% PDEModel - 表示 PDE 模型的容器
% GeometricModel - 模型边界的几何表示
% AnalyticGeometry - 来自 PDEGEOM 或 DECSG 几何矩阵的 2D 几何对象
% DiscreteGeometry - 分面边界的几何表示
% BoundaryCondition - 定义 PDE 的边界条件
% CoefficientAssignmentRecords - 方程系数的分配
% CoefficientAssignment - 指定区域或子域上的所有 PDE 系数
% InitialConditionsRecords - 记录初始条件的分配
% GeometricInitialConditions - 区域或区域边界上的初始条件
% NodalInitialConditions - 在网格节点指定的初始条件
% PDEResults - PDE 解及其派生量
% StationaryResults - PDE 解及其派生量
% TimeDependentResults - PDE 解及其派生量
% EigenResults - PDE 解表示
% StructuralModel - 表示结构分析模型的容器
% ThermalModel - 表示热分析模型的容器
% ThermalMaterialAssignment - 指定区域或子区域的材料属性
% HeatSourceAssignment - 指定域或子域上的热源
% ThermalBC - 定义热模型的边界条件 (BC)
% GeometricThermalICs - 区域或区域边界上的初始温度
% NodalThermalICs - 在网格节点指定的初始温度
% ThermalResults - 热解及其派生量
% SteadyStateThermalResults - 稳态热模型解及其派生量
% TransientThermalResults - 瞬态热模型解及其派生量
% StructuralMaterialAssignment - 区域或子域上的结构材料属性分配
% BodyLoadAssignment - 结构分析模型的体载荷分配
% StructuralBC - 定义结构模型的边界载荷或边界条件 (BC)
% StructuralResults - 结构解及其派生量
% StaticStructuralResults - 静态结构模型解及其派生量
% StructuralDampingAssignment - 结构分析模型的阻尼分配
% GeometricStructuralICs - 区域上的初始位移和速度
% NodalStructuralICs - 在网格节点指定的初始位移和速度
% ModalStructuralResults - 结构模态分析结果
% TransientStructuralResults - 瞬态结构模型解及其派生量
%
% 未记录的类和函数
% pdeCalcFullU
% pdeODEInfo
% pdeParabolicInfo
% pdeHyperbolicInfo
0 基础:GUI 界面操作
示例问题
没有什么编程基础,但是又想快速写出有限元程序的同学,建议使用图形界面进行编程,然后导出代码。做个简单的示例操作。比如要求解:
−
Δ
u
=
λ
u
u
∣
∂
Ω
=
0
Ω
是
一
个
L
型
区
域
,
如
下
图
所
示
-\\Delta u = \\lambda u\\\\ u|_{\\partial \\Omega}=0\\\\ \\Omega 是一个L 型区域,如下图所示
−Δu=λuu∣∂Ω=0Ω是一个L型区域,如下图所示
工具箱求解
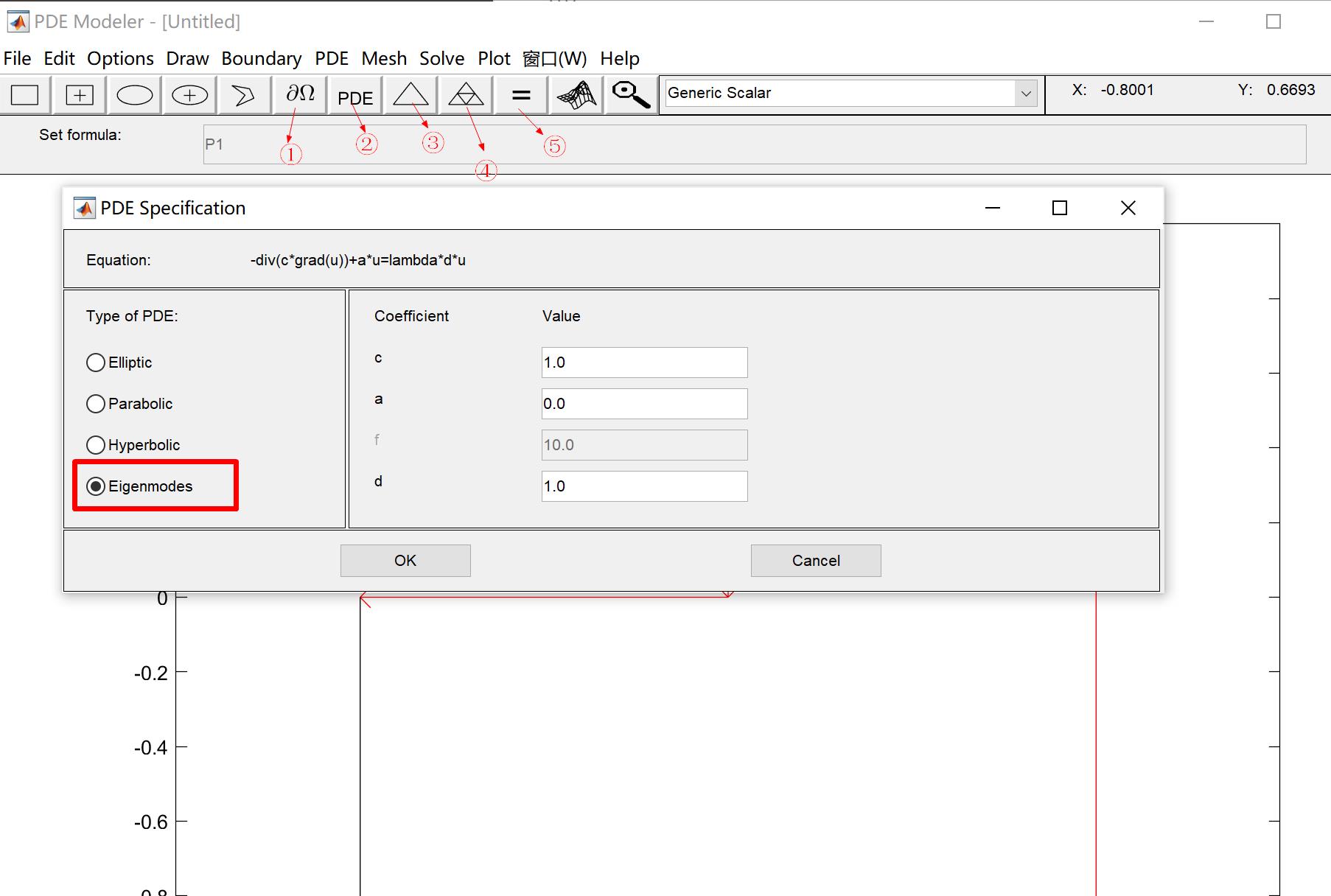
- 打开 MATLAB
- 命令行窗口口输入
pdetool回车 - 依次点击菜单栏如下按钮,其中点击 PDE 的时候,改成特征值模式
基础通过 GUI 界面生成的代码此由 pdetool 编写和读取,不应编辑。 有两个推荐的替代方案:
- 从 pdetool 导出所需的变量并创建一个 MATLAB 脚本,对这些变量执行操作。
- 使用 MATLAB 脚本完全定义问题。
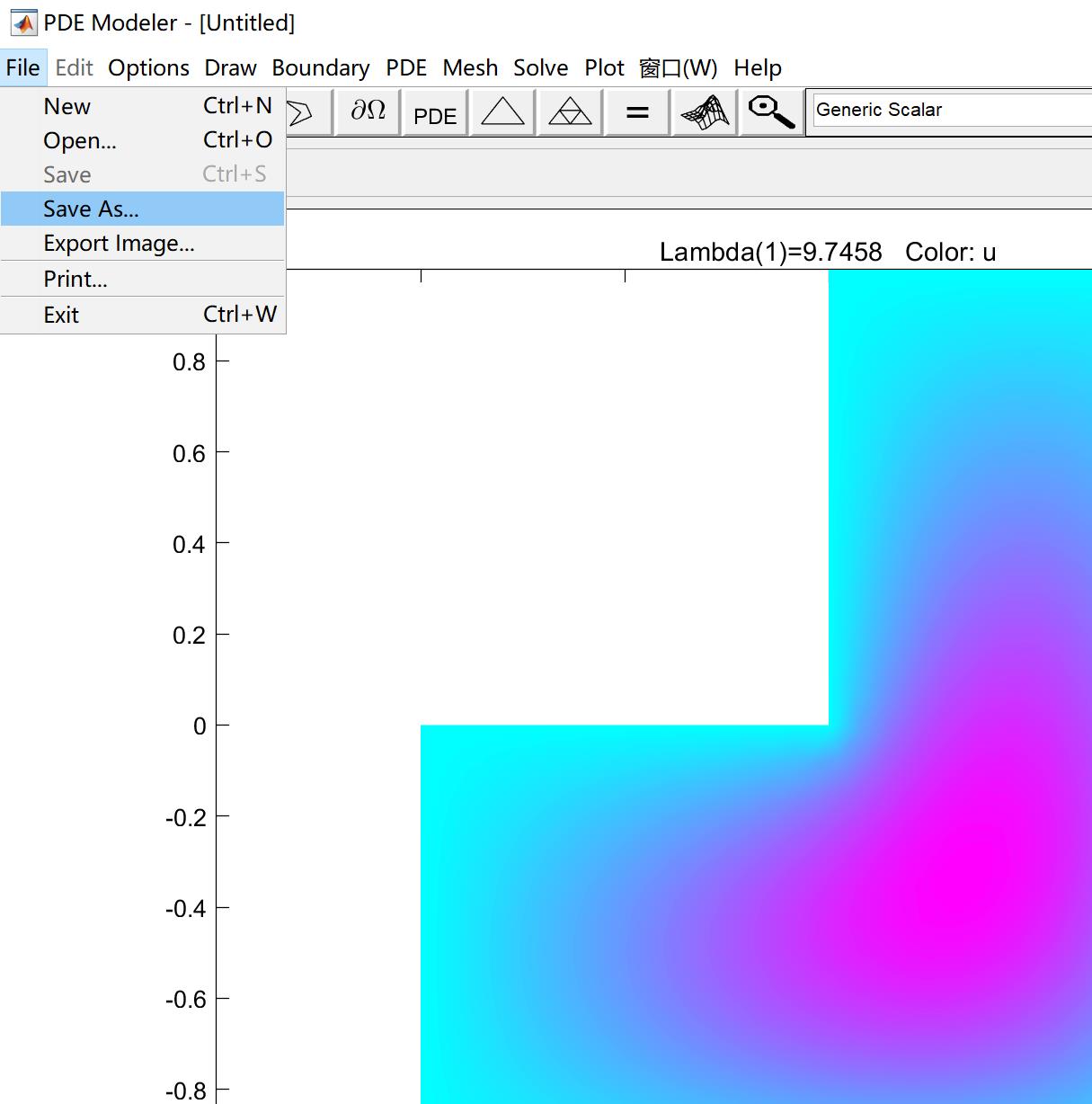
导出为代码形式
得到求解结果后,保存为 main.m 文件,并打开。
function pdemodel
[pde_fig,ax]=pdeinit;
pdetool('appl_cb',1);
set(ax,'DataAspectRatio',[1.5 1 1]);
set(ax,'PlotBoxAspectRatio',[1 0.74375917767988253 0.74375917767988253]);
set(ax,'XLim',[-1.5 1.5]);
set(ax,'YLim',[-1 1]);
set(ax,'XTickMode','auto');
set(ax,'YTickMode','auto');
% Geometry description:
pdepoly([ -1,...
1,...
1,...
0,...
0,...
-1,...
],...
[ -1,...
-1,...
1,...
1,...
0,...
0,...
],...
'P1');
set(findobj(get(pde_fig,'Children'),'Tag','PDEEval'),'String','P1')
% Boundary conditions:
pdetool('changemode',0)
pdesetbd(6,...
'dir',...
1,...
'1',...
'0')
pdesetbd(5,...
'dir',...
1,...
'1',...
'0')
pdesetbd(4,...
'dir',...
1,...
'1',...
'0')
pdesetbd(3,...
'dir',...
1,...
'1',...
'0')
pdesetbd(2,...
'dir',...
1,...
'1',...
'0')
pdesetbd(1,...
'dir',...
1,...
'1',...
'0')
% Mesh generation:
setappdata(pde_fig,'Hgrad',1.3);
setappdata(pde_fig,'refinemethod','regular');
setappdata(pde_fig,'jiggle',char('on','mean',''));
setappdata(pde_fig,'MesherVersion','preR2013a');
pdetool('initmesh')
pdetool('refine')
% PDE coefficients:
pdeseteq(4,...
'1.0',...
'0.0',...
'10.0',...
'1.0',...
'0:10',...
'0.0',...
'0.0',...
'[0 100]')
setappdata(pde_fig,'currparam',...
['1.0 ';...
'0.0 ';...
'10.0';...
'1.0 '])
% Solve parameters:
setappdata(pde_fig,'solveparam',...
char('0','1548','10','pdeadworst',...
'0.5','longest','0','1E-4','','fixed','Inf'))
% Plotflags and user data strings:
setappdata(pde_fig,'plotflags',[1 1 1 1 1 1 1 1 0 0 0 1 1 0 0 0 0 1]);
setappdata(pde_fig,'colstring','');
setappdata(pde_fig,'arrowstring','');
setappdata(pde_fig,'deformstring','');
setappdata(pde_fig,'heightstring','');
% Solve PDE:
pdetool('solve')
代码导出相关数据
当前目录下,保存如下代码为 matqueque。
function y = matqueue(p0,p1,p2,p3,p4,p5,p6,p7,p8,p9,p10,p11,p12,p13,p14,p15,p16,p17,p18)
%MATQUEUE Creates and manipulates a figure-based matrix queue.
% FIG = MATQUEUE('create');
% Create a queue figure and return its number.
%
% FIG = MATQUEUE('find');
% Searches the root window's children to find the queue
% figure. Returns 0 if no queue exists.
%
% MATQUEUE('put', X1, X2, ..., X18);
% Insert up to 18 matrices into the queue. Create the
% queue if none exists.
%
% X = MATQUEUE('get');
% Get a matrix out the queue. Return [] if the queue is
% empty.
%
% NUM_ITEMS = MATQUEUE('length');
% Return the number of matrices in the queue. Return -1 if
% no buffer exists.
%
% MATQUEUE('clear')
% Empty the queue.
%
% MATQUEUE('close')
% Close the queue figure.
buffer_name = 'FIFO Buffer';
if (nargin < 1)
action = 'create';
else
action = lower(p0);
end
if (strcmp(action, 'create'))
%==================================================================
% Create a new queue.
%
% matqueue('create');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
oldFig = findobj(allchild(0), 'flat', 'Visible', 'on');
buffer_fig = matqueue('find');
if (buffer_fig ~= 0)
% Buffer already exists; do nothing
return;
end
buffer_fig = figure('Name', buffer_name, ...
'Visible', 'off',...
'HandleVisibility', 'callback', ...
'IntegerHandle', 'off', ...
'NumberTitle', 'off', ...
'Tag', buffer_name);
if (~isempty(oldFig))
figure(oldFig(1));
end
queue_holder = uicontrol(buffer_fig, 'Style', 'text', ...
'Visible', 'off', 'Tag', 'QueueHolder');
y = buffer_fig;
return;
elseif (strcmp(action, 'find'))
%==================================================================
% Find the queue figure. If no queue figure exists, return 0.
%
% matqueue('find');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
% Search the root's children for a figure with the right name
buffer_number = findobj(allchild(0), 'flat', 'Tag', buffer_name);
if (isempty(buffer_number))
y = 0;
else
y = buffer_number(1);
end
return;
elseif (strcmp(action, 'put'))
%==================================================================
% Put matrices into the queue. Queue figure is created if none
% exists.
%
% matqueue('put', X1, X2, ..., X18);
%==================================================================
narginchk(2,19);
nargoutchk(0,0);
buffer_fig = matqueue('find');
if (buffer_fig == 0)
buffer_fig = matqueue('create');
end
queue_holder = findobj(get(buffer_fig, 'Children'), 'flat', 'Tag', 'QueueHolder');
if (isempty(queue_holder))
error(message('pde:matqueue:corruptMatrixQueue'));
end
handles = get(queue_holder, 'UserData');
num_inputs = nargin-1;
new_handles = zeros(1, num_inputs);
for i = 1:num_inputs
arg_name = ['p', num2str(i)];
try_string = ['new_handles(num_inputs+1-i)=uicontrol(buffer_fig,', ...
' ''Style'',''text'',''Visible'','...
' ''off'',''UserData'',', arg_name, ');'];
eval(try_string);
end
set(queue_holder, 'UserData', [new_handles handles]);
return;
elseif (strcmp(action, 'get'))
%==================================================================
% Return earliest matrix item in the queue. Errors out if there's
% no queue. Returns empty matrix if queue is empty.
%
% X = matqueue('get');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
buffer_fig = matqueue('find');
if (buffer_fig == 0)
% No buffer; return empty matrix.
y = [];
return;
end
queue_holder = findobj(get(buffer_fig, 'Children'), 'flat', 'Tag', 'QueueHolder');
if (isempty(queue_holder))
error(message('pde:matqueue:corruptMatrixQueue'));
end
handles = get(queue_holder, 'UserData');
N = length(handles);
if (N > 0)
y = get(handles(N), 'UserData');
delete(handles(N));
handles(N) = [];
set(queue_holder, 'UserData', handles);
else
% Nothing in the buffer; return empty matrix
y = [];
end
return;
elseif (strcmp(action, 'length'))
%==================================================================
% Returns the length of the queue. Returns -1 if no queue
% figure exists.
%
% num_items = matqueue('length');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
buffer_fig = matqueue('find');
if (buffer_fig == 0)
% No buffer! Return 0.
y = 0;
return;
end
queue_holder = findobj(get(buffer_fig, 'Children'), 'flat', 'Tag', 'QueueHolder');
if (isempty(queue_holder))
error(message('pde:matqueue:corruptMatrixQueue'));
end
y = length(get(queue_holder, 'UserData'));
return;
elseif (strcmp(action, 'clear'))
%==================================================================
% Clear the queue.
%
% matqueue('clear');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
buffer_fig = matqueue('find');
if (buffer_fig == 0)
% No buffer; nothing to do.
return;
end
queue_holder = findobj(get(buffer_fig, 'Children'), 'flat', 'Tag', 'QueueHolder');
if (~isempty(queue_holder))
delete(queue_holder);
end
queue_holder = uicontrol(buffer_fig, 'Style', 'text', ...
'Visible', 'off', 'Tag', 'QueueHolder');
return;
elseif (strcmp(action, 'close'))
%==================================================================
% Close the queue figure.
%
% matqueue('close');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
buffer_fig = matqueue('find');
if (buffer_fig ~= 0)
close(buffer_fig);
end
return;
else
error(message('pde:matqueue:unknownAction'));
end
同样地,将如下代码存为 matqdlg。
function y = matqdlg(P0,P1,V1,P2,V2,P3,V3,P4,V4,P5,V5,P6,V6,P7,V7,P8,V8,P9,V9)
%MATQDLG Workspace transfer dialog box.
% MATQDLG('ws2buffer', {prop/value pairs})
% Put up a dialog box that invites the user to enter a comma-separated
% list of expressions. When user clicks OK, eval the expressions
% one at a time, putting the results into the buffer. Allowable
% properties include 'PromptString', which may be a string matrix,
% 'OKCallback', which will be eval'ed when the user finishes
% with the dialog box by typing <Return> in the entry field or
% clicking OK, 'CancelCallback', which will be eval'ed when the user
% clicks Cancel, and 'EntryString', the default user entry.
% Figure properties are also allowed in this list, such as 'Name'.
%
% MATQDLG('buffer2ws', {prop/value pairs})
% Put up a dialog box that invites the user to enter N comma-separated
% variable names, where N is the number of items in the buffer. Get
% items out of the buffer one at a time, storing the results in
% indicated workspace variables. Allowable properties include
% 'PromptString', 'OKCallback', 'CancelCallback', and 'EntryString'.
% These work the same way as in the 'ws2buffer' action.
%
% Y = MATQDLG('get_entry');
% Return the user-entered string in the entry field of the workspace
% transfer dialog box.
%
% H = MATQDLG('find')
% Return the handle of the dialog box figure.
%
% H = MATQDLG('create')
% Create the dialog box figure, returning its handle.
% MATLAB-files required: matqparse.m, ws2matq.m, matq2ws.m.
buffer_tag = 'Workspace Transfer';
buffer_name = '';
if (nargin < 1)
action = 'create';
else
action = lower(P0);
end
if (strcmp(action, 'create'))
%==================================================================
% Create a new queue.
%
% matqdlg('create');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
buffer_fig = matqdlg('find');
if (buffer_fig ~= 0)
% Queue already exists; do nothing
return;
end
screenSize = get(0,'ScreenSize');
width = 415;
height = 136;
left = (screenSize(3) - width) / 2;
bottom = (screenSize(4) - height) / 2;
buffer_fig = figure('Name', buffer_name, 'Visible', 'off',...
'HandleVisibility', 'callback', ...
'IntegerHandle', 'off', ...
'Units', 'pixels', ...
'Position', [left bottom width height], ...
'Colormap', [], ...
'MenuBar', 'none', ...
'Color', get(0, 'DefaultUIControlBackgroundColor'), ...
'DefaultUIControlInterruptible','on', ...
'Tag', buffer_tag, ...
'NumberTitle', 'off');
axes('Visible', 'off', 'Parent', buffer_fig);
ok = uicontrol(buffer_fig, ...
'Style', 'push', ...
'Units', 'normalized', ...
'Position', [.63 .06 .15 .24], ...
'Tag', 'OK', ...
'String', 'OK');
cancel = uicontrol(buffer_fig, ...
'Style', 'push', ...
'Units', 'normalized', ...
'Position', [.80 .06 .15 .24], ...
'Tag', 'Cancel', ...
'String', 'Cancel');
prompt = uicontrol(buffer_fig, ...
'Style', 'text', ...
'Units', 'normalized', ...
'Position', [.05 .76 .90 .15], ...
'String', '', ...
'Min', 1, ...
'Max', 3, ...
'Tag', 'Prompt', ...
'Horizontal', 'left');
entry = uicontrol(buffer_fig, ...
'Style', 'edit', ...
'Units', 'normalized', ...
'Position', [.05 .46 .90 .31], ...
'BackgroundColor', 'w', ...
'ForegroundColor', 'k', ...
'Tag', 'Entry', ...
'Horizontal', 'left');
y = buffer_fig;
return;
elseif (strcmp(action, 'find'))
%==================================================================
% Find the queue figure. If no queue figure exists, return 0.
%
% matqdlg('find');
%==================================================================
narginchk(1,1);
nargoutchk(0,1);
% Search the root's children for a figure with the right tag
buffer_number = findobj(allchild(0), 'flat', 'Type', 'figure', ...
'Tag', buffer_tag);
if (isempty(buffer_number))
y = 0;
else
y = buffer_number(1);
end
return;
elseif (strcmp(action, 'ws2buffer'))
%==================================================================
% Invoke the dialog box in workspace-to-buffer mode.
%
% matqdlg('ws2buffer')
%==================================================================
narginchk(1,19);
if (rem(nargin,2) ~= 1)
error(message('pde:matqdl:invalidNumberOfArgs'));
end
% Remember the current visible figure.
figHandles = findobj(allchild(0), 'flat', 'Visible', 'on');
% Set up default properties.
ok_string = '';
cancel_string = '';
entry_string = '';
prompt_string = 'Enter workspace variable names or expressions:';
buffer_fig = matqdlg('find');
if (buffer_fig == 0)
buffer_fig = matqdlg('create');
end
if (~isempty(figHandles))
set(buffer_fig, 'UserData', figHandles(1));
end
% Process param/value pairs.
num_properties = (nargin - 1)/2;
for k = 1:num_properties
prop_arg_name = ['P' num2str(k)];
val_arg_name = ['V' num2str(k)];
prop_arg = lower(eval(prop_arg_name));
val_arg = eval(val_arg_name);
if (strcmp(prop_arg, 'promptstring'))
prompt_string = val_arg;
elseif (strcmp(prop_arg, 'okcallback'))
ok_string = val_arg;
elseif (strcmp(prop_arg, 'cancelcallback'))
cancel_string = val_arg;
elseif (strcmp(prop_arg, 'entrystring'))
entry_string = val_arg;
else
set(buffer_fig, prop_arg, val_arg);
end
end
promptButton = findobj(buffer_fig, 'Tag', 'Prompt');
entry = findobj(buffer_fig, 'Tag', 'Entry');
okButton = findobj(buffer_fig, 'Tag', 'OK');
cancelButton = findobj(buffer_fig, 'Tag', 'Cancel');
set(okButton, 'UserData', ok_string, 'Callback', {@okButtonCallback,'ws'});
set(cancelButton, 'UserData', cancel_string, 'Callback', @cancelButtonCallback);
set(promptButton, 'String', prompt_string);
set(entry, 'String', entry_string);
% Adjust height of figure and prompt box.
prompt_lines = size(prompt_string,1);
if (prompt_lines > 1)
set([promptButton entry okButton cancelButton], 'Units', 'pixels');
prompt_position = get(promptButton, 'Position');
prompt_height = prompt_position(4);
increase = (prompt_lines-1) * prompt_height;
fig_position = get(buffer_fig, 'Position');
set(promptButton, 'Position', prompt_position + [0 0 0 increase]);
set(buffer_fig, 'Position', fig_position + [0 0 0 increase]);
set([promptButton entry okButton cancelButton], 'Units', 'normalized');
end
drawnow;
figure(buffer_fig);
return
elseif (strcmp(action, 'buffer2ws'))
%==================================================================
% Invoke the dialog box in workspace-to-buffer mode.
%
% matqdlg('ws2buffer')
%==================================================================
narginchk(1,19);
if (rem(nargin,2) ~= 1)
error(message('pde:matqdl:invalidNumberOfArgs'));
end
% Remember the current visible figure.
figHandles = findobj(allchild(0), 'flat', 'Visible', 'on');
num_items = matqueue('length');
if (num_items == 0)
% If the queue is empty, there's nothing to do!
error(message('pde:matqdl:emptyQueue'));
end
buffer_fig = matqdlg('find');
if (buffer_fig == 0)
buffer_fig = matqdlg('create');
end
if (~isempty(figHandles))
set(buffer_fig, 'UserData', figHandles(1));
end
% Set up default properties.
ok_string = '';
entry_string = '';
cancel_string = '';
if (num_items == 1)
prompt_string = 'Enter a variable name:';
else
prompt_string = sprintf('Enter %d variable names:', num_items);
end
% Process param/value pairs.
num_properties = (nargin - 1)/2;
for k = 1:num_properties
prop_arg_name = ['P' num2str(k)];
val_arg_name = ['V' num2str(k)];
prop_arg = lower(eval(prop_arg_name));
val_arg = eval(val_arg_name);
if (strcmp(prop_arg, 'promptstring'))
prompt_string = val_arg;
elseif (strcmp(prop_arg, 'okcallback'))
ok_string = val_arg;
elseif (strcmp(prop_arg, 'cancelcallback'))
cancel_string = val_arg;
elseif (strcmp(prop_arg, 'entrystring'))
entry_string = val_arg;
else
set(buffer_fig, prop_arg, val_arg);
end
end
promptButton = findobj(buffer_fig, 'Tag', 'Prompt');
set(findobj(buffer_fig, 'Tag', 'OK'), 'UserData', ok_string, ...
'Callback', {@okButtonCallback,'mat'});
set(findobj(buffer_fig, 'Tag', 'Cancel'), 'UserData', cancel_string, ...
'Callback', @cancelButtonCallback);
set(promptButton, 'String', prompt_string);
set(findobj(buffer_fig, 'Tag', 'Entry'), 'String', entry_string);
% Adjust height of figure and prompt box.
prompt_lines = size(prompt_string,1);
if (prompt_lines > 1)
set([promptButton entry okButton cancelButton], 'Units', 'pixels');
prompt_position = get(promptButton, 'Position');
prompt_height = prompt_position(4);
increase = (prompt_lines-1) * prompt_height;
fig_position = get(buffer_fig, 'Position');
set(promptButton, 'Position', prompt_position + [0 0 0 increase]);
set(buffer_fig, 'Position', fig_position + [0 0 0 increase]);
set([promptButton entry okButton cancelButton], 'Units', 'normalized');
end
drawnow;
figure(buffer_fig);
return;
elseif (strcmp(action, 'get_entry'))
%==================================================================
% Get the user-entered string in the entry field.
%
% string = matqdlg('get_entry');
%==================================================================
buffer_fig = matqdlg('find');
if (buffer_fig < 1)
y = [];
return;
end
y = get(findobj(buffer_fig, 'Tag', 'Entry'), 'String');
return;
else
error(message('pde:matqdl:invalidAction'));
end
%--------------------------------------------
function okButtonCallback(obj,evd,wsormat)
switch(wsormat)
case 'ws'
ws2matq
case 'mat'
matq2ws
otherwise
error(message('pde:matqdl:okButtonCallback:unknownOption'));
end
%-------------------------------------------
function cancelButtonCallback(obj,evd)
matqueue('clear');
eval(get(findobj(gcbf,'Tag','Cancel'),'UserData'));
close(matqdlg('find'));
将如下代码存为文件 matq2ws 。
%MATQ2WS Helper script for matqdlg.
% MATQ2WS gets the user-entered comma-delimited string,
% parses it, and then tries to put the queue contents one
% at a time into the resulting variable names. For
% recoverable errors, the prompt is reset and the user can
% try again. Recoverable errors include empty input
% string, string containing "#", too few variable names,
% and too many variable names. If the user types something
% that cannot be a workspace variable name, that's a
% nonrecoverable error. The queue is cleared and made
% invisible, and an error message is printed to the command
% window.
% Variable names (these need to be cleared before returning):
% var_string_ err_string_ new_prompt_ pound_ N_
% fatal_error_flag_ i_ expr_ try_string_ catch_string_ error_message_
var_string_ = get(findobj(gcbf,'Tag','Entry'), 'String');
[var_string_, err_string_] = matqparse(var_string_);
if (~isempty(err_string_))
errordlg(char('Could not parse your expression.', err_string_), ...
'Workspace Transfer Error', 'on');
clear var_string_ err_string_ new_prompt_ ...
pound_ N_ fatal_error_flag_ i_ expr_ try_string_ catch_string_ ...
error_message_
return;
end
N_ = size(var_string_, 1);
if (N_ < matqueue('length'))
errordlg(char('You did not enter enough variable names.', ...
'Please try again.'), 'Workspace Transfer Error', 'on');
clear var_string_ err_string_ new_prompt_ ...
pound_ N_ fatal_error_flag_ i_ expr_ try_string_ catch_string_ ...
error_message_
return;
elseif (N_ > matqueue('length'))
errordlg(char('You entered too many variable names.', ...
'Please try again.'), 'Workspace Transfer Error', 'on');
clear var_string_ err_string_ new_prompt_ ...
pound_ N_ fatal_error_flag_ i_ expr_ try_string_ catch_string_ ...
error_message_
return;
end
fatal_error_flag_ = 0;
for i_ = 1:N_
expr_ = deblank(var_string_(i_, :));
try
assignin('base', expr_, matqueue('get'));
catch
fatal_error_flag_ = 1;
end
if (fatal_error_flag_)
errordlg(char(sprintf('Error using "%s" as a workspace variable.', ...
expr_), 'You will need to start over.'), ...
'Workspace Transfer Error', 'on');
set(matqdlg('find'), 'Visible', 'off');
if (~isempty(get(matqdlg('find'),'UserData')))
if (any(get(0,'Children') == get(matqdlg('find'),'UserData')))
figure(get(matqdlg('find'),'UserData'));
end
end
matqueue('clear');
clear var_string_ err_string_ new_prompt_ ...
pound_ N_ fatal_error_flag_ i_ expr_ try_string_ catch_string_ ...
error_message_
return;
end
end
set(matqdlg('find'), 'Visible', 'off');
if (~isempty(get(matqdlg('find'),'UserData')))
if (any(get(0,'Children') == get(matqdlg('find'),'UserData')))
figure(get(matqdlg('find'),'UserData'));
end
end
try
char(get(get(matqdlg('find'),'CurrentObject'),'UserData'));
catch
disp('Error evaluating button callback.')
end
close(matqdlg('find'));
clear var_string_ err_string_ new_prompt_ ...
pound_ N_ fatal_error_flag_ i_ expr_ try_string_ catch_string_ error_message_
如下代码为 matqparse 。
function [m,error_str] = matqparse(str,flag)
%MATQPARSE Dialog entry parser for MATQDLG.
% [M,ERROR_STR] = MATQPARSE(STR,FLAG) is a miniparser
% for MATQDLG.
% eg: 'abc de f ghij' becomes [abc ]
% [de ]
% [f ]
% [ghij]
% Uses either spaces, commas, semi-colons, or brackets
% as separators. Thus 'a 10*[b c] d' will crash. User
% must instead say 'a [10*[b c]] d'.
%
% See also MATQDLG, MATQUEUE.
% Error checks
error_str = '';
if nargin==0
error_str = getString(message('pde:matqparse:StringReqd'));
return
elseif size(str,1)>1 | ~ischar(str)
error_str = getString(message('pde:matqparse:SingleRowStringReqd'));
return
end
if nargin<2
flag = 1;
end
l = length(str);
m = '';
i = 1;
j = 1;
k = 1;
while k<=l
% Check for missing [
if str(k)==']'
error_str = getString(message('pde:matqparse:UnmatchedRightBracket'));
return
elseif str(k)=='['
% Check for missing ]
index = find(str(k+1:l)==']');
if isempty(index)
error_str = getString(message('pde:matqparse:UnmatchedLeftBracket'));
return
else
% Check for mismatched brackets between k+1 and last element
index1 = find(str(k+1:l)=='[');
l_index = length(index);
l_index1 = length(index1);
if l_index~=l_index1+1
error_str = getString(message('pde:matqparse:BracketMismatch'));
return
else
% Everything OK so far
di = find([index1 index(l_index)+1]>index);
end_ind = index(di(1));
m_middle = ['[' matqparse(str(k+1:k+end_ind-1),2) ']'];
if flag==1
% m and m_end may be multiline matrices
m_end = matqparse(str(k+end_ind+1:l),1);
m = char(m,m_middle,m_end);
else
% m and m_end will be single line
m_end = matqparse(str(k+end_ind+1:l),2);
m = [m m_middle m_end];
end
k = l+1;
end
end
elseif any(str(k)==' ;,') & (flag==1)
if j>1
% Only reset to beginning of next row if
% NOT already at beginning of a row
j=1;
i = i+1;
end
k = k+1; % Increment index into str
else
m(i,j) = str(k);
j = j+1; % Increment column of resultant matrix, m
k = k+1; % Increment index into str
end
end
% Since char of zero is end-of-string flag, change to blanks
if ~isempty(m)
EndOfString = find(abs(m)==0);
m(EndOfString) = char(' '*ones(size(EndOfString)));
% Eliminate any empty rows
if size(m,2)>1
m = m(find(any(m'~=' ')),:);
end
end
% end matqparse
在生成的主文件求解程序末尾添加和修改为如下代码,即可导出数据。
clc
clear
close all
[pde_fig,ax]=pdeinit;
pdetool('appl_cb',1);
set(ax,'DataAspectRatio',[1.5 1 1]);
set(ax,'PlotBoxAspectRatio',[1 0.74375917767988253 0.74375917767988253]);
set(ax,'XLim',[-1.5 1.5]);
set(ax,'YLim',[-1 1]);
set(ax,'XTickMode','auto');
set(ax,'YTickMode','auto');
% Geometry description:
pdepoly([ -1,...
1,...
1,...
0,...
0,...
-1,...
],...
[ -1,...
-1,...
1,...
1,...
0,...
0,...
],...
'P1');
set(findobj(get(pde_fig,'Children'),'Tag','PDEEval'),'String','P1')
% Boundary conditions:
pdetool('changemode',0)
pdesetbd(6,...
'dir',...
1,...
'1',...
'0')
pdesetbd(5,...
'dir',...
1,...
'1',...
'0')
pdesetbd(4,...
'dir',...
1,...
'1',...
'0')
pdesetbd(3,...
'dir',...
1,...
'1',...
'0')
pdesetbd(2,...
'dir',...
1,...
'1',...
'0')
pdesetbd(1,...
'dir',...
1,...
'1',...
'0')
% Mesh generation:
setappdata(pde_fig,'Hgrad',1.3);
setappdata(pde_fig,'refinemethod','regular');
setappdata(pde_fig,'jiggle',char('on','mean',''));
setappdata(pde_fig,'MesherVersion','preR2013a');
pdetool('initmesh')
pdetool('refine')
% PDE coefficients:
pdeseteq(4,...
'1.0',...
'0.0',...
'10.0',...
'1.0',...
'0:10',...
'0.0',...
'0.0',...
'[0 100]')
setappdata(pde_fig,'currparam',...
['1.0 ';...
'0.0 ';...
'10.0';...
'1.0 '])
% Solve parameters:
setappdata(pde_fig,'solveparam',...
char('0','1548','10','pdeadworst',...
'0.5','longest','0','1E-4','','fixed','Inf'))
% Plotflags and user data strings:
setappdata(pde_fig,'plotflags',[1 1 1 1 1 1 1 1 0 0 0 1 1 0 0 0 0 1]);
setappdata(pde_fig,'colstring','');
setappdata(pde_fig,'arrowstring','');
setappdata(pde_fig,'deformstring','');
setappdata(pde_fig,'heightstring','');
% Solve PDE:
pdetool('solve')
for flag=1:6
% case: export variables to workspace
pde_fig=findobj(allchild(0),'flat','Tag','PDETool');
if flag==1
% export geometry data:
gd=get(findobj(get(pde_fig,'Children'),'flat',...
'Tag','PDEMeshMenu'),'UserData');
ns=getappdata(pde_fig,'objnames');
evalhndl=findobj(get(pde_fig,'Children'),'flat','Tag','PDEEval');
sf=get(evalhndl,'String');
matqueue('put',gd,sf,ns)
pstr='Variable names for geometry data, set formula, labels:';
estr='gd sf ns';
elseif flag==2
% export decomposed list, boundary conditions:
dl1=getappdata(pde_fig,'dl1');
h=findobj(get(pde_fig,'Children'),'flat','Tag','PDEBoundMenu');
bl=get(findobj(get(h,'Children'),'flat',...
'Tag','PDEBoundMode'),'UserData');
matqueue('put',dl1,bl)
pstr='Variable names for decomposed geometry, boundary cond''s:';
estr='g b';
elseif flag==3
% export mesh:
h=findobj(get(pde_fig,'Children'),'flat','Tag','PDEMeshMenu');
p=get(findobj(get(h,'Children'),'flat','Tag','PDEInitMesh'),...
'UserData');
e=get(findobj(get(h,'Children'),'flat','Tag','PDERefine'),...
'UserData');
t=get(findobj(get(h,'Children'),'flat','Tag','PDEMeshParam'),...
'UserData');
matqueue('put',p,e,t)
pstr='Variable names for mesh data (points, edges, triangles):';
estr='p e t';
elseif flag==4
% export PDE coefficients:
params=get(findobj(get(pde_fig,'Children'),'Tag','PDEPDEMenu'),...
'UserData');
ns=getappdata(pde_fig,'ncafd');
nc=ns(1); na=ns(2); nf=ns(3); nd=ns(4);
c=params(1:nc,:);
a=params(nc+1:nc+na,:);
f=params(nc+na+1:nc+na+nf,:);
d=params(nc+na+nf+1:nc+na+nf+nd,:);
matqueue('put',c,a,f,d)
pstr='Variable names for PDE coefficients:';
estr='c a f d';
elseif flag==5
% export solution:
u=get(findobj(get(pde_fig,'Children'),'flat','Tag','PDEPlotMenu'),...
'UserData');
l=get(findobj(get(pde_fig,'Children'),'flat','Tag','winmenu'),...
'UserData');
if isempty(l)
pstr='Variable name for solution:';
estr='u';
matqueue('put',u)
else
pstr='Variable names for solution and eigenvalues:';
estr='u l';
matqueue('put',u,l)
end
elseif flag==6
% export movie:
M=getappdata(pde_fig,'movie');
matqueue('put',M)
pstr='Variable name for PDE solution movie:';
estr='M';
end
pdeinfo('Change the variable name(s) if desired. OK when done.',0);
%matqdlg('buffer2ws','Name','Export','PromptString',pstr,...
% 'OKCallback','pdeinfo;','CancelCallback','pdeinfo;','EntryString',estr);
end
出现 You did not enter enough variable names. Please try again. 如何解决?
不要调用matqdlg('buffer2ws','Name','Export','PromptString',pstr,'OKCallback','pdeinfo;','CancelCallback','pdeinfo;','EntryString',estr);即可。
0.1 基础:编程调用 PDE 工具箱
有的朋友说,PDE 工具箱求解 PDE 生成的代码,运行的时候会跳出界面,一看就显得很没有 B 格,有没有办法纯代码操作呢?当然有,界面也只不过是一些代码的集合而已。不想要 PDE 工具箱的界面,又想快速地写出有限元代码,需要一点点代码和有限元基础。
由工具箱界面生成的代码,一定是和图形界面高度耦合的,我们想把图形界面去掉不显示,并不容易。所以我们考虑使用 MATLAB 脚本完全定义问题。举一个简单的例子来说明它的操作。
我们还是以拉普拉斯特征值为例:
−
Δ
u
=
λ
u
-\\Delta u=\\lambda u
−Δu=λu
代码如下:
clc
clear
close all
model = createpde();%创建PDE模型
geometryFromEdges(model,@squareg);%从边界生成几何
pdegplot(model,'EdgeLabels','on')%可视化
ylim([-1.5,1.5])
axis equal
applyBoundaryCondition(model,'dirichlet','Edge',4,'u',0);%左边界 0 狄利克雷边界条件
applyBoundaryCondition(model,'neumann','Edge',[1,3],'g',0,'q',0);%上下边界 0 纽曼边界条件
applyBoundaryCondition(model,'neumann','Edge',2,'g',0,'q',-3/4);%由边界混合边界条件,\\frac{\\partial u}{\\partial n}-\\frac{3}{4} u=0
specifyCoefficients(model,'m',0,'d',1,'c',1,'a',0,'f',0);%指定系数,表示特征值问题
r = [-Inf,10];%找小于10的特征值和特征向量
generateMesh(model,'Hmax',0.05);%生成网格
results = solvepdeeig(model,r);%在指定范围求解特征值问题,找六个特征值
l = results.Eigenvalues;%获得特征值
u = results.Eigenvectors;%获得特征值对应的特征向量
pdeplot(model,'XYData',u(:,1));%画第一个特征函数
pdeplot(model,'XYData',u(:,length(l)));%画最后一个特征函数
%l(2) - l(1) - pi^2/4
%l(5) - l(1) - pi^2
上面用的是矩形区域。当然,更复杂的区域我们可以使用 decsg。区域的矩阵表示可以参考这个链接。
decsg 使用的简单示例如下:
clc
clear
close all
rect1 = [3
4
-1
1
1
-1
0
0
-0.5
-0.5];
C1 = [1
1
-0.25
0.25];
C2 = [1
-1
-0.25
0.25];
C1 = [C1;zeros(length(rect1) - length(C1),1)];
C2 = [C2;zeros(length(rect1) - length(C2),1)];
gd = [rect1,C1,C2];
ns = char('rect1','C1','C2');
ns = ns';
sf = '(rect1+C1)-C2';
[dl,bt] = decsg(gd,sf,ns);
期间的刚度矩阵和质量矩阵也可以通过 assembleFEMatrices 获得。最后给一个区域稍微复杂一点的,通俗易懂的例子吧。顺便和直接把刚度矩阵和质量矩阵导出来调用 eigs 求解做个比较。
clc
clear
close all
%% 创建模型
model = createpde;
radius = 2;
g = decsg([1 0 0 radius]','C1',('C1')');%通过简单集合图形生成区域
geometryFromEdges(model,g);
pdegplot(model,'EdgeLabels','on')%可视化
axis equal
title 'Geometry with Edge Labels'
c = 1;a = 0;f = 0;d = 1;
specifyCoefficients(model,'m',0,'d',d,'c',c,'a',a,'f',f);
applyBoundaryCondition(model,'dirichlet','Edge',(1:4),'u',0);
generateMesh(model,'Hmax',0.2);
%% 通过导出的刚度矩阵求特征值
FEMatrices = assembleFEMatrices(model,'nullspace');
K = FEMatrices.Kc;
B = FEMatrices.B;
M = FEMatrices.M;
sigma = 10;
numberEigenvalues = 5;
[eigenvectorsEigs,eigenvaluesEigs] = eigs(K,M,numberEigenvalues,sigma);
eigenvaluesEigs = diag(eigenvaluesEigs);
[maxEigenvaluesEigs,maxIndex] = max(eigenvaluesEigs);
eigenvectorsEigs = B*eigenvectorsEigs;
%% 通过工具箱直接求特征值
r = [min(eigenvaluesEigs)*0.99 max(eigenvaluesEigs)*1.01];
result = solvepdeeig(model,r);
eigenvectorsPde = result.Eigenvectors;
eigenvaluesPde = result.Eigenvalues;
%% 对比两以上是关于MATLAB基础问题的主要内容,如果未能解决你的问题,请参考以下文章