什么提供机器人应用设计功能
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了什么提供机器人应用设计功能相关的知识,希望对你有一定的参考价值。
参考技术A 机器人应用可以由不同的软件和硬件组成,提供不同的设计和功能。以下是一些常见的机器人应用设计和功能:机器视觉:机器人可以使用摄像头和其他传感器来获取和处理图像和视频数据。这项技术可以用于自动化操作、物品识别和跟踪、安全监控等。
人工智能和机器学习:机器人可以使用人工智能和机器学习技术来进行自主决策和学习,这可以用于自适应行为、情境感知、自我优化等。
需求分析和规划:机器人可以使用规划算法和决策支持系统来分析需求和制定任务计划。这可以用于自动化生产、物流和仓储等领域。
物理运动和控制:机器人可以使用运动控制硬件和软件来执行实际动作,这可以用于自动化制造、物流和仓储、医疗助理等。
语音和自然语言处理:机器人可以使用语音识别和自然语言处理技术来与人类进行交互,这可以用于智能客服、娱乐产品、智能家居等。
总之,机器人应用的设计和功能可以根据不同的应用场景和需求进行定制。 参考技术B 机器人应用设计功能可以由不同的软件、平台和工具提供。以下是几种常见的机器人应用设计功能提供者:
1. ROS(机器人操作系统):ROS是一种开源机器人软件平台,提供了丰富的机器人应用设计功能,包括机器人运动控制、感知、导航、任务规划等功能。
2. MATLAB Robotics System Toolbox:MATLAB Robotics System Toolbox是一种机器人应用设计工具箱,提供了机器人建模、运动控制、感知、路径规划等功能,可以与ROS等机器人软件平台集成使用。
3. RobotStudio:RobotStudio是ABB公司提供的机器人应用设计软件,可以用于建模、仿真、编程和优化ABB机器人系统。
4. RoboDK:RoboDK是一种通用的机器人应用设计和仿真软件,支持多种机器人品牌和模型,可以用于机器人编程、路径规划和仿真。
5. V-REP(Virtual Robot Experimentation Platform):V-REP是一种基于仿真的机器人应用设计平台,可以用于机器人建模、控制、感知、路径规划等功能,支持多种机器人品牌和模型。
这些机器人应用设计功能提供者都提供了丰富的机器人应用设计功能,可以根据具体需求选择合适的平台或工具。
RPC框架原理简介
什么是RPC框架?
RPC,全称为Remote Procedure Call,即远程过程调用,是一种计算机通信协议。
比如现在有两台机器:A机器和B机器,并且分别部署了应用A和应用B。假设此时位于A机器上的A应用想要调用位于B机器上的B应用提供的函数或是方法,由于A应用和B应用不在一个内存空间里面,所以不能直接调用,此时就需要通过网络来表达调用的方式和传输调用的数据。也即所谓的远程调用。
RPC 功能目标
RPC 的主要功能目标是让构建分布式计算(应用)更容易,在提供强大的远程调用能力时不损失本地调用的语义简洁性。为实现该目标,RPC 框架需提供一种透明调用机制让使用者不必显式的区分本地调用和远程调用。下面我们将具体细化 stub 结构的实现。
因为在几个进程内(应用分布在不同的机器上),无法共用内存空间,或者在一台机器内通过本地调用无法完成相关的需求,比如不同的系统之间的通讯,甚至不同组织之间的通讯。此外由于机器的横向扩展,需要在多台机器组成的集群上部署应用等等。
RPC 调用分类
RPC 调用分以下两种:
同步调用
客户方等待调用执行完成并返回结果。异步调用
客户方调用后不用等待执行结果返回,但依然可以通过回调通知等方式获取返回结果。若客户方不关心调用返回结果,则变成单向异步调用,单向调用不用返回结果。
异步和同步的区分在于是否等待服务端执行完成并返回结果。
RPC框架的实现原理
主要有以下几个步骤:
1、建立通信
首先要解决通讯的问题:即A机器想要调用B机器,首先得建立起通信连接。主要是通过在客户端和服务器之间建立TCP连接,远程过程调用的所有相关的数据都在这个连接里面进行传输交换。
通常这个连接可以是按需连接(需要调用的时候就先建立连接,调用结束后就立马断掉),也可以是长连接(客户端和服务器建立起连接之后保持长期持有,不管此时有无数据包的发送,可以配合心跳检测机制定期检测建立的连接是否存活有效),多个远程过程调用共享同一个连接。
2、服务寻址
解决寻址的问题:即A机器上的应用A要调用B机器上的应用B,那么此时对于A来说如何告知底层的RPC框架所要调用的服务具体在哪里呢?
3、网络传输
3.1、序列化
当A机器上的应用发起一个RPC调用时,调用方法和其入参等信息需要通过底层的网络协议如TCP传输到B机器,由于网络协议是基于二进制的,所有我们传输的参数数据都需要先进行序列化(Serialize)或者编组(marshal)成二进制的形式才能在网络中进行传输。然后通过寻址操作和网络传输将序列化或者编组之后的二进制数据发送给B机器。
3.2、反序列化
当B机器接收到A机器的应用发来的请求之后,又需要对接收到的参数等信息进行反序列化操作(序列化的逆操作),即将二进制信息恢复为内存中的表达方式,然后再找到对应的方法(寻址的一部分)进行本地调用(一般是通过生成代理Proxy去调用, 通常会有JDK动态代理、CGLIB动态代理、Javassist生成字节码技术等),之后得到调用的返回值。
4、服务调用
B机器进行本地调用(通过代理Proxy)之后得到了返回值,此时还需要再把返回值发送回A机器,同样也需要经过序列化操作,然后再经过网络传输将二进制数据发送回A机器,而当A机器接收到这些返回值之后,则再次进行反序列化操作,恢复为内存中的表达方式,最后再交给A机器上的应用进行相关处理(一般是业务逻辑处理操作)。
通常,经过以上四个步骤之后,一次完整的RPC调用算是完成了,另外可能因为网络抖动等原因需要重试等。
RPC 核心组件
一个完整的RPC架构里面包含了四个核心的组件,分别是Client,Client Stub,Server以及Server Stub,这个Stub可以理解为存根。
客户端(Client):服务调用方(服务消费者)
服务端(Server):服务的真正提供者
服务端存根(Server Stub):接收客户端发送过来的请求消息并进行解包,然后再调用本地服务进行处理
RPC调用过程
服务消费者(client客户端)通过本地调用的方式调用服务
客户端存根(client stub)接收到调用请求后负责将方法、入参等信息序列化(组装)成能够进行网络传输的消息体
服务端存根(server stub)收到消息后进行解码(反序列化操作)
服务端存根(server stub)根据解码结果调用本地的服务进行相关处理
本地服务执行具体业务逻辑
将处理结果返回给服务端存根(server stub)
服务端存根(server stub)将返回结果重新打包成消息(序列化)并通过网络发送至消费方
服务端(server)通过sockets将消息发送到客户端;
客户端存根(client stub)接收到消息,并进行解码(反序列化)
服务消费方得到最终结果
而RPC框架的实现目标则是将上面的第2-10步完好地封装起来,也就是把调用、编码/解码的过程给封装起来,让用户感觉上像调用本地服务一样的调用远程服务。
注意:无论是何种类型的数据,最终都需要转换成二进制流在网络上进行传输,数据的发送方需要将对象转换为二进制流,而数据的接收方则需要把二进制流再恢复为对象。
RPC框架需要解决的问题?
如何确定客户端和服务端之间的通信协议?
如何更高效地进行网络通信?
服务端提供的服务如何暴露给客户端?
客户端如何发现这些暴露的服务?
如何更高效地对请求对象和响应结果进行序列化和反序列化操作?
使用了哪些技术?
8.1、动态代理
生成Client Stub(客户端存根)和Server Stub(服务端存根)的时候需要用到java动态代理技术,可以使用jdk提供的原生的动态代理机制,也可以使用开源的:Cglib代理,Javassist字节码生成技术。
8.2、序列化
在网络中,所有的数据都将会被转化为字节进行传送,所以为了能够使参数对象在网络中进行传输,需要对这些参数进行序列化和反序列化操作。
序列化:把对象转换为字节序列的过程称为对象的序列化,也就是编码的过程。
反序列化:把字节序列恢复为对象的过程称为对象的反序列化,也就是解码的过程。
目前比较高效的开源序列化框架:如Kryo、fastjson和Protobuf等。
8.3、NIO通信
出于并发性能的考虑,传统的阻塞式 IO 显然不太合适,因此我们需要异步的 IO,即 NIO。
Java 提供了 NIO 的解决方案,Java 7 也提供了更优秀的 NIO.2 支持。可以选择Netty或者mina来解决NIO数据传输的问题。
8.4、服务注册中心
可选:Redis、Zookeeper、Consul 、Etcd。
一般使用ZooKeeper提供服务注册与发现功能,解决单点故障以及分布式部署的问题(注册中心)。
RPC 异常处理
无论 RPC 怎样努力把远程调用伪装的像本地调用,但它们依然有很大的不同点,而且有一些异常情况是在本地调用时绝对不会碰到的。在说异常处理之前,我们先比较下本地调用和 RPC 调用的一些差异:
本地调用一定会执行,而远程调用则不一定,调用消息可能因为网络原因并未发送到服务方。
本地调用只会抛出接口声明的异常,而远程调用还会跑出 RPC 框架运行时的其他异常。
本地调用和远程调用的性能可能差距很大,这取决于 RPC 固有消耗所占的比重。
正是这些区别决定了使用 RPC 时需要更多考量。当调用远程接口抛出异常时,异常可能是一个业务异常, 也可能是 RPC 框架抛出的运行时异常(如:网络中断等)。业务异常表明服务方已经执行了调用,可能因为某些原因导致未能正常执行, 而 RPC 运行时异常则有可能服务方根本没有执行,对调用方而言的异常处理策略自然需要区分。
由于 RPC 固有的消耗相对本地调用高出几个数量级,本地调用的固有消耗是纳秒级,而 RPC 的固有消耗是在毫秒级。那么对于过于轻量的计算任务就并不合适导出远程接口由独立的进程提供服务, 只有花在计算任务上时间远远高于 RPC 的固有消耗才值得导出为远程接口提供服务。
RPC 结构拆解
如下图所示。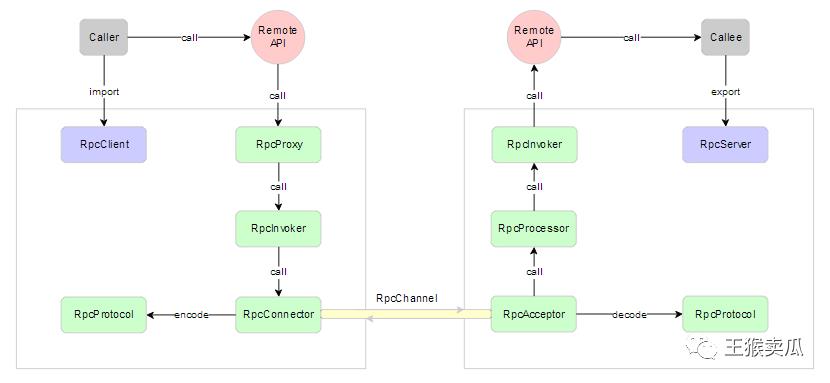
RPC 服务方通过 RpcServer 去导出(export)远程接口方法,而客户方通过 RpcClient 去引入(import)远程接口方法。客户方像调用本地方法一样去调用远程接口方法,RPC 框架提供接口的代理实现,实际的调用将委托给代理 RpcProxy 。代理封装调用信息并将调用转交给 RpcInvoker 去实际执行。在客户端的 RpcInvoker 通过连接器 RpcConnector 去维持与服务端的通道 RpcChannel, 并使用 RpcProtocol 执行协议编码(encode)并将编码后的请求消息通过通道发送给服务方。
RPC 服务端接收器 RpcAcceptor 接收客户端的调用请求,同样使用 RpcProtocol 执行协议解码(decode)。解码后的调用信息传递给 RpcProcessor 去控制处理调用过程,最后再委托调用给 RpcInvoker 去实际执行并返回调用结果。
RPC 组件职责
上面我们进一步拆解了 RPC 实现结构的各个组件组成部分,下面我们详细说明下每个组件的职责划分。
RpcServer
负责导出(export)远程接口RpcClient
负责导入(import)远程接口的代理实现RpcProxy
远程接口的代理实现RpcInvoker
客户方实现:负责编码调用信息和发送调用请求到服务方并等待调用结果返回
服务方实现:负责调用服务端接口的具体实现并返回调用结果RpcProtocol
负责协议编/解码RpcConnector
负责维持客户方和服务方的连接通道和发送数据到服务方RpcAcceptor
负责接收客户方请求并返回请求结果RpcProcessor
负责在服务方控制调用过程,包括管理调用线程池、超时时间等RpcChannel
数据传输通道
如何调用他人的远程服务
由于各服务部署在不同机器,服务间的调用免不了网络通信过程,服务消费方每调用一个服务都要写一坨网络通信相关的代码,不仅复杂而且极易出错。
如果有一种方式能让我们像调用本地服务一样调用远程服务,而让调用者对网络通信这些细节透明,那么将大大提高生产力,比如服务消费方在执行helloWorldService.sayHello(“test”)时,实质上调用的是远端的服务。这种方式其实就是RPC(Remote Procedure Call Protocol),在各大互联网公司中被广泛使用,如阿里巴巴的hsf、dubbo(开源)、Facebook的thrift(开源)、Google grpc(开源)、Twitter的finagle(开源)等、新浪微博的motan(开源)。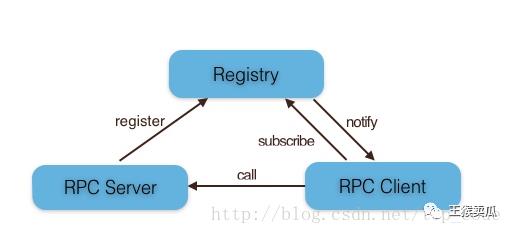
注册中心,用于服务端注册远程服务以及客户端发现服务
服务端,对外提供后台服务,将自己的服务信息注册到注册中心
目前主要的注册中心可以借由 zookeeper,eureka,consul,etcd 等开源框架实现。互联网公司也会因为自身业务的特性自研,如美团点评自研的 MNS,新浪微博自研的 vintage。
注册中心维护着一个服务配置中心节点树:
当某个服务的所有服务器都下线了,那么这个服务也就下线了。
服务提供方可以根据服务消费者的数量来作为服务下线的依据。
如何发布自己的服务
如何让别人使用我们的服务呢?有同学说很简单嘛,告诉使用者服务的IP以及端口就可以了啊。确实是这样,这里问题的关键在于怎么实现自动告知。
具体来说,zookeeper就是个分布式文件系统,每当一个服务提供者部署后都要将自己的服务注册到zookeeper的某一路径上: /{service}/{version}/{ip:port}, 比如我们的HelloWorldService部署到两台机器,那么zookeeper上就会创建两条目录:分别为/HelloWorldService/1.0.0/100.19.20.01:16888 /HelloWorldService/1.0.0/100.19.20.02:16888。
zookeeper提供了“心跳检测”功能,它会定时向各个服务提供者发送一个请求(实际上建立的是一个 Socket 长连接),如果长期没有响应,服务中心就认为该服务提供者已经“挂了”,并将其剔除,比如100.19.20.02这台机器如果宕机了,那么zookeeper上的路径就会只剩/HelloWorldService/1.0.0/100.19.20.01:16888。
更为重要的是zookeeper与生俱来的容错容灾能力(比如leader选举),可以确保服务注册表的高可用性。
感知服务的下线
服务上线时自然要注册到注册中心,但下线时也得从注册中心中摘除。注册是一个主动的行为,这没有特别要注意的地方,但服务下线却是一个值得思考的问题。服务下线包含了主动下线和系统宕机等异常方式的下线。
4.1 临时节点+长连接
在 zookeeper 中存在持久化节点和临时节点的概念。持久化节点一经创建,只要不主动删除,便会一直持久化存在;临时节点的生命周期则是和客户端的连接同生共死的,应用连接到 zookeeper 时创建一个临时节点,使用长连接维持会话,这样无论何种方式服务发生下线,zookeeper 都可以感知到,进而删除临时节点。zookeeper 的这一特性和服务下线的需求契合的比较好,所以临时节点被广泛应用。
4.2 主动下线+心跳检测
并不是所有注册中心都有临时节点的概念,另外一种感知服务下线的方式是主动下线。例如在 eureka 中,会有 eureka-server 和 eureka-client 两个角色,其中 eureka-server 保存注册信息,地位等同于 zookeeper。当 eureka-client 需要关闭时,会发送一个通知给 eureka-server,从而让 eureka-server 摘除自己这个节点。但这么做最大的一个问题是,如果仅仅只有主动下线这么一个手段,一旦 eureka-client 非正常下线(如断电,断网),eureka-server 便会一直存在一个已经下线的服务节点,一旦被其他服务发现进而调用,便会带来问题。为了避免出现这样的情况,需要给 eureka-server 增加一个心跳检测功能,它会对服务提供者进行探测,比如每隔30s发送一个心跳,如果三次心跳结果都没有返回值,就认为该服务已下线。
开源的优秀RPC框架
阿里巴巴 Dubbo:https://github.com/alibaba/dubbo
新浪微博 Motan:https://github.com/weibocom/motan
gRPC:https://github.com/grpc/grpc
rpcx :https://github.com/smallnest/rpcx
Apache Thrift :https://thrift.apache.org/
以上是关于什么提供机器人应用设计功能的主要内容,如果未能解决你的问题,请参考以下文章