Android Framework学习之init进程解析
Posted 伯努力不努力
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Android Framework学习之init进程解析相关的知识,希望对你有一定的参考价值。
init进程是android系统中用户空间的第一个进程,它被赋予了很多极其重要的工作职责,init进程相关源码位于system/core/init,本篇博客我们就一起来学习init进程(基于Android 7.0)。
init入口函数分析
init的入口函数为main,位于system/core/init/init.cpp
int main(int argc, char** argv) {
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (!strcmp(basename(argv[0]), "watchdogd")) {
return watchdogd_main(argc, argv);
}
// Clear the umask.
umask(0);
add_environment("PATH", _PATH_DEFPATH);
bool is_first_stage = (argc == 1) || (strcmp(argv[1], "--second-stage") != 0);
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
//1.创建一些文件夹,并挂载设备,这些都是与Linux相关
if (is_first_stage) {
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
#define MAKE_STR(x) __STRING(x)
mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC));
mount("sysfs", "/sys", "sysfs", 0, NULL);
}
// We must have some place other than / to create the device nodes for
// kmsg and null, otherwise we won't be able to remount / read-only
// later on. Now that tmpfs is mounted on /dev, we can actually talk
// to the outside world.
//2.重定向标准输入,输出,错误输出到/dev/_null_
open_devnull_stdio();
3.初始化内核log系统
klog_init();
klog_set_level(KLOG_NOTICE_LEVEL);
NOTICE("init %s started!\\n", is_first_stage ? "first stage" : "second stage");
if (!is_first_stage) {
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
//4.初始化和属性相关资源
property_init();
// If arguments are passed both on the command line and in DT,
// properties set in DT always have priority over the command-line ones.
process_kernel_dt();
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
// used by init as well as the current required properties.
export_kernel_boot_props();
}
// Set up SELinux, including loading the SELinux policy if we're in the kernel domain.
5.完成SELinux相关工作
selinux_initialize(is_first_stage);
// If we're in the kernel domain, re-exec init to transition to the init domain now
// that the SELinux policy has been loaded.
if (is_first_stage) {
6.重新设置属性
if (restorecon("/init") == -1) {
ERROR("restorecon failed: %s\\n", strerror(errno));
security_failure();
}
char* path = argv[0];
char* args[] = { path, const_cast<char*>("--second-stage"), nullptr };
if (execv(path, args) == -1) {
ERROR("execv(\\"%s\\") failed: %s\\n", path, strerror(errno));
security_failure();
}
}
// These directories were necessarily created before initial policy load
// and therefore need their security context restored to the proper value.
// This must happen before /dev is populated by ueventd.
NOTICE("Running restorecon...\\n");
restorecon("/dev");
restorecon("/dev/socket");
restorecon("/dev/__properties__");
restorecon("/property_contexts");
restorecon_recursive("/sys");
7.创建epoll句柄
epoll_fd = epoll_create1(EPOLL_CLOEXEC);
if (epoll_fd == -1) {
ERROR("epoll_create1 failed: %s\\n", strerror(errno));
exit(1);
}
8.装载子进程信号处理器
signal_handler_init();
property_load_boot_defaults();
export_oem_lock_status();
//9.启动属性服务
start_property_service();
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
Parser& parser = Parser::GetInstance();
parser.AddSectionParser("service",std::make_unique<ServiceParser>());
parser.AddSectionParser("on", std::make_unique<ActionParser>());
parser.AddSectionParser("import", std::make_unique<ImportParser>());
//10.解析init.rc配置文件
parser.ParseConfig("/init.rc");
ActionManager& am = ActionManager::GetInstance();
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
am.QueueBuiltinAction(set_mmap_rnd_bits_action, "set_mmap_rnd_bits");
am.QueueBuiltinAction(keychord_init_action, "keychord_init");
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
// Don't mount filesystems or start core system services in charger mode.
std::string bootmode = property_get("ro.bootmode");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
if (!waiting_for_exec) {
am.ExecuteOneCommand();
restart_processes();
}
int timeout = -1;
if (process_needs_restart) {
timeout = (process_needs_restart - gettime()) * 1000;
if (timeout < 0)
timeout = 0;
}
if (am.HasMoreCommands()) {
timeout = 0;
}
bootchart_sample(&timeout);
epoll_event ev;
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, timeout));
if (nr == -1) {
ERROR("epoll_wait failed: %s\\n", strerror(errno));
} else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
}
return 0;
}
从上面代码中可以精简归纳init的main方法做的事情:
1.创建文件系统目录并挂载相关的文件系统
2.屏蔽标准的输入输出
3.初始化内核log系统
4.调用property_init初始化属性相关的资源
5.完成SELinux相关工作
6.重新设置属性
7.创建epoll句柄
8.装载子进程信号处理器
9.通过property_start_service启动属性服务
10.通过parser.ParseConfig(“/init.rc”)来解析init.rc
接下来对上述部分步骤,进行详细解析。
1.创建文件系统目录并挂载相关的文件系统
//清除屏蔽字(file mode creation mask),保证新建的目录的访问权限不受屏蔽字影响。
umask(0);
add_environment("PATH", _PATH_DEFPATH);
bool is_first_stage = (argc == 1) || (strcmp(argv[1], "--second-stage") != 0);
// Get the basic filesystem setup we need put together in the initramdisk
if (is_first_stage) {
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
#define MAKE_STR(x) __STRING(x)
mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC));
mount("sysfs", "/sys", "sysfs", 0, NULL);
}该部分主要用于创建和挂载启动所需的文件目录。
需要注意的是,在编译Android系统源码时,在生成的根文件系统中,并不存在这些目录,它们是系统运行时的目录,即当系统终止时,就会消失。
在init初始化过程中,Android分别挂载了tmpfs,devpts,proc,sysfs这4类文件系统。
2.屏蔽标准的输入输出
open_devnull_stdio();前文生成/dev目录后,init进程将调用open_devnull_stdio函数,屏蔽标准的输入输出。
open_devnull_stdio函数会在/dev目录下生成null设备节点文件,并将标准输入、标准输出、标准错误输出全部重定向到null设备中。
void open_devnull_stdio(void)
{
// Try to avoid the mknod() call if we can. Since SELinux makes
// a /dev/null replacement available for free, let's use it.
int fd = open("/sys/fs/selinux/null", O_RDWR);
if (fd == -1) {
// OOPS, /sys/fs/selinux/null isn't available, likely because
// /sys/fs/selinux isn't mounted. Fall back to mknod.
static const char *name = "/dev/__null__";
if (mknod(name, S_IFCHR | 0600, (1 << 8) | 3) == 0) {
fd = open(name, O_RDWR);
unlink(name);
}
if (fd == -1) {
exit(1);
}
}
dup2(fd, 0);
dup2(fd, 1);
dup2(fd, 2);
if (fd > 2) {
close(fd);
}
}open_devnull_stdio函数定义于system/core/init/util.cpp中。
这里需要说明的是,dup2函数的作用是用来复制一个文件的描述符,通常用来重定向进程的stdin、stdout和stderr。它的函数原形是:
int dup2(int oldfd, int targetfd)
该函数执行后,targetfd将变成oldfd的复制品。
因此上述过程其实就是:创建出null设备后,将0、1、2绑定到null设备上。因此init进程调用open_devnull_stdio函数后,通过标准的输入输出无法输出信息。
4.初始化属性域
if (!is_first_stage) {
.......
property_init();
.......
}调用property_init初始化属性域。在Android平台中,为了让运行中的所有进程共享系统运行时所需要的各种设置值,系统开辟了属性存储区域,并提供了访问该区域的API。
需要强调的是,在init进程中有部分代码块以is_first_stage标志进行区分,决定是否需要进行初始化,而is_first_stage的值,由init进程main函数的入口参数决定。 其原因在于,在引入selinux机制后,有些操作必须要在内核态才能完成;
但init进程作为android的第一个进程,又是运行在用户态的。
于是,最终设计为用is_first_stage进行区分init进程的运行状态。init进程在运行的过程中,会完成从内核态到用户态的切换。
void property_init() {
if (__system_property_area_init()) {
ERROR("Failed to initialize property area\\n");
exit(1);
}
}property_init函数定义于system/core/init/property_service.cpp中,如上面代码所示,最终调用_system_property_area_init函数初始化属性域。
5.完成SELinux相关工作
// Set up SELinux, including loading the SELinux policy if we're in the kernel domain.
selinux_initialize(is_first_stage);init进程进程调用selinux_initialize启动SELinux。从注释来看,init进程的运行确实是区分用户态和内核态的。
static void selinux_initialize(bool in_kernel_domain) {
Timer t;
selinux_callback cb;
//用于打印log的回调函数
cb.func_log = selinux_klog_callback;
selinux_set_callback(SELINUX_CB_LOG, cb);
//用于检查权限的回调函数
cb.func_audit = audit_callback;
selinux_set_callback(SELINUX_CB_AUDIT, cb);
if (in_kernel_domain) {
//内核态处理流程
INFO("Loading SELinux policy...\\n");
//用于加载sepolicy文件。该函数最终将sepolicy文件传递给kernel,这样kernel就有了安全策略配置文件,后续的MAC才能开展起来。
if (selinux_android_load_policy() < 0) {
ERROR("failed to load policy: %s\\n", strerror(errno));
security_failure();
}
//内核中读取的信息
bool kernel_enforcing = (security_getenforce() == 1);
//命令行中得到的数据
bool is_enforcing = selinux_is_enforcing();
if (kernel_enforcing != is_enforcing) {
//用于设置selinux的工作模式。selinux有两种工作模式:
//1、”permissive”,所有的操作都被允许(即没有MAC),但是如果违反权限的话,会记录日志
//2、”enforcing”,所有操作都会进行权限检查。在一般的终端中,应该工作于enforing模式
if(security_setenforce(is_enforcing)) {
........
//将重启进入recovery mode
security_failure();
}
}
if (write_file("/sys/fs/selinux/checkreqprot", "0") == -1) {
security_failure();
}
NOTICE("(Initializing SELinux %s took %.2fs.)\\n",
is_enforcing ? "enforcing" : "non-enforcing", t.duration());
} else {
selinux_init_all_handles();
}
}6.重新设置属性
// If we're in the kernel domain, re-exec init to transition to the init domain now that the SELinux policy has been loaded.
if (is_first_stage) {
//按selinux policy要求,重新设置init文件属性
if (restorecon("/init") == -1) {
ERROR("restorecon failed: %s\\n", strerror(errno));
security_failure();
}
char* path = argv[0];
char* args[] = { path, const_cast<char*>("--second-stage"), nullptr };
//这里就是前面所说的,启动用户态的init进程,即second-stage
if (execv(path, args) == -1) {
ERROR("execv(\\"%s\\") failed: %s\\n", path, strerror(errno));
security_failure();
}
}
// These directories were necessarily created before initial policy load
// and therefore need their security context restored to the proper value.
// This must happen before /dev is populated by ueventd.
INFO("Running restorecon...\\n");
restorecon("/dev");
restorecon("/dev/socket");
restorecon("/dev/__properties__");
restorecon_recursive("/sys");上述文件节点在加载Sepolicy之前已经被创建了,因此在加载完Sepolicy后,需要重新设置相关的属性。
9.启动配置属性的服务端
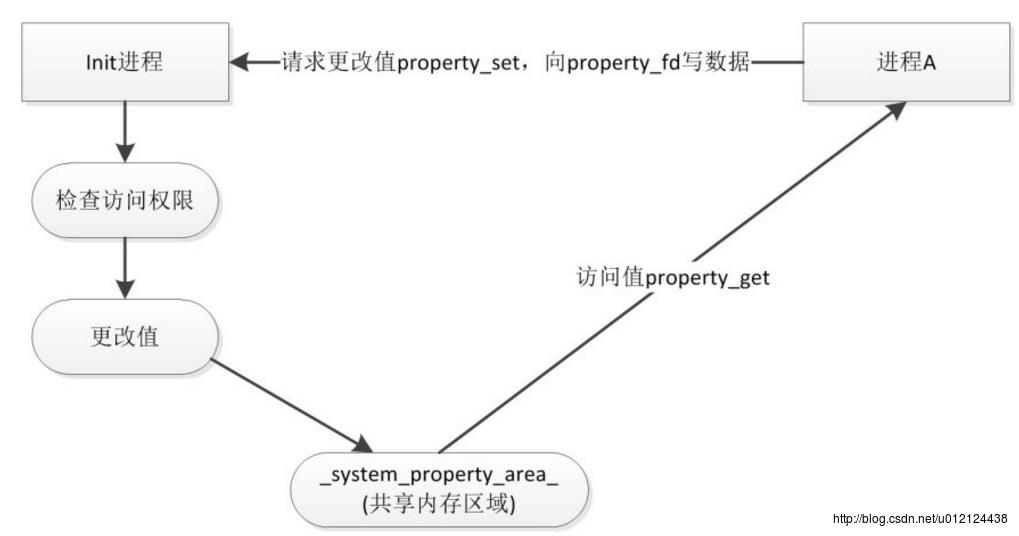
start_property_service();init进程在共享内存区域中,创建并初始化属性域。其它进程可以访问属性域中的值,但更改属性值仅能在init进程中进行。这就是init进程调用start_property_service的原因。其它进程修改属性值时,要预先向init进程提交值变更申请,然后init进程处理该申请,并修改属性值。在访问和修改属性时,init进程都可以进行权限控制。
void start_property_service() {
//创建了一个非阻塞socket
property_set_fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK, 0666, 0, 0, NULL);
if (property_set_fd == -1) {
ERROR("start_property_service socket creation failed: %s\\n", strerror(errno));
exit(1);
}
//调用listen函数监听property_set_fd, 于是该socket变成一个server
listen(property_set_fd, 8);
//监听server socket上是否有数据到来
register_epoll_handler(property_set_fd, handle_property_set_fd);
}我们知道,在create_socket函数返回套接字property_set_fd时,property_set_fd是一个主动连接的套接字。此时,系统假设用户会对这个套接字调用connect函数,期待它主动与其它进程连接。
由于在服务器编程中,用户希望这个套接字可以接受外来的连接请求,也就是被动等待用户来连接,于是需要调用listen函数使用主动连接套接字变为被连接套接字,使得一个进程可以接受其它进程的请求,从而成为一个服务器进程。
因此,调用listen后,init进程成为一个服务进程,其它进程可以通过property_set_fd连接init进程,提交设置系统属性的申请。
listen函数的第二个参数,涉及到一些网络的细节。
在进程处理一个连接请求的时候,可能还存在其它的连接请求。因为TCP连接是一个过程,所以可能存在一种半连接的状态。有时由于同时尝试连接的用户过多,使得服务器进程无法快速地完成连接请求。
因此,内核会在自己的进程空间里维护一个队列,以跟踪那些已完成连接但服务器进程还没有接手处理的用户,或正在进行的连接的用户。这样的一个队列不可能任意大,所以必须有一个上限。listen的第二个参数就是告诉内核使用这个数值作为上限。因此,init进程作为系统属性设置的服务器,最多可以同时为8个试图设置属性的用户提供服务。
在启动配置属性服务的最后,调用函数register_epoll_handler。该函数将利用之前创建出的epoll句柄监听property_set_fd。当property_set_fd中有数据到来时,init进程将利用handle_property_set_fd函数进行处理。
static void handle_property_set_fd() {
..........
if ((s = accept(property_set_fd, (struct sockaddr *) &addr, &addr_size)) < 0) {
return;
}
........
r = TEMP_FAILURE_RETRY(recv(s, &msg, sizeof(msg), MSG_DONTWAIT));
.........
switch(msg.cmd) {
.........
}
.........
}handle_propery_set_fd函数实际上是调用accept函数监听连接请求,接收property_set_fd中到来的数据,然后利用recv函数接受到来的数据,最后根据到来数据的类型,进行设置系统属性等相关操作,在此不做深入分析。
介绍一下系统属性改变的一些用途。
在init.rc中定义了一些与属性相关的触发器。当某个条件相关的属性被改变时,与该条件相关的触发器就会被触发。举例来说,如下面代码所示,debuggable属性变为1时,将执行启动console进程等操作。
on property:ro.debuggable=1
# Give writes to anyone for the trace folder on debug builds.
# The folder is used to store method traces.
chmod 0773 /data/misc/trace
start console总结一下,其它进程修改系统属性时,大致的流程如下图所示:其它的进程像init进程发送请求后,由init进程检查权限后,修改共享内存区。
10.解析配置文件init.rc
init.rc是系统配置文件,位于system/core/rootdir/init.rc,Android 7.0中对init.rc文件进行了拆分,每个服务一个rc文件。
init.rc文件是在init进程启动后执行的启动脚本,文件中记录着init进程需执行的操作。在Android系统中,使用init.rc和init.{ hardware }.rc两个文件。
其中init.rc文件在Android系统运行过程中用于通用的环境设置与进程相关的定义,init.{hardware}.rc(例如,高通有init.qcom.rc,MTK有init.mediatek.rc)用于定义Android在不同平台下的特定进程和环境设置等。
init.rc文件大致分为两大部分,一部分是以“on”关键字开头的动作列表(action list):
on early-init
# Set init and its forked children's oom_adj.
write /proc/1/oom_score_adj -1000
.........
start ueventd另一部分是以“service”关键字开头的服务列表(service list):
service ueventd /sbin/ueventd
class core
critical
seclabel u:r:ueventd:s0动作列表用于创建所需目录,以及为某些特定文件指定权限,而服务列表用来记录init进程需要启动的一些子进程。如上面代码所示,service关键字后的第一个字符串表示服务(子进程)的名称,第二个字符串表示服务的执行路径。
接下来,我们从ParseConfig函数入手,逐步分析整个解析过程(函数定义于system/core/init/ Init_parser.cpp中):
bool Parser::ParseConfig(const std::string& path) {
if (is_dir(path.c_str())) {
//传入参数为目录地址
return ParseConfigDir(path);
}
//传入参数为文件地址
return ParseConfigFile(path);
}bool Parser::ParseConfigDir(const std::string& path) {
...........
std::unique_ptr<DIR, int(*)(DIR*)> config_dir(opendir(path.c_str()), closedir);
..........
//看起来很复杂,其实就是递归目录
while ((current_file = readdir(config_dir.get()))) {
std::string current_path = android::base::StringPrintf("%s/%s", path.c_str(), current_file->d_name);
if (current_file->d_type == DT_REG) {
//最终还是靠ParseConfigFile来解析实际的文件
if (!ParseConfigFile(current_path)) {
.............
}
}
}
}从上面的代码可以看出,解析init.rc文件的函数是ParseConfigFile:
bool Parser::ParseConfigFile(const std::string& path) {
INFO("Parsing file %s...\\n", path.c_str());
Timer t;
std::string data;
//读取路径指定文件中的内容,保存为字符串形式
if (!read_file(path.c_str(), &data)) {
return false;
}
data.push_back('\\n'); // TODO: fix parse_config.
//解析获取的字符串
ParseData(path, data);
for (const auto& sp : section_parsers_) {
sp.second->EndFile(path);
}
// Turning this on and letting the INFO logging be discarded adds 0.2s to
// Nexus 9 boot time, so it's disabled by default.
if (false) DumpState();
NOTICE("(Parsing %s took %.2fs.)\\n", path.c_str(), t.duration());
return true;
}ParseData函数定义于system/core/init/init_parser.cpp中,根据关键字解析出服务和动作。动作与服务会以链表节点的形式注册到service_list与action_list中,service_list与action_list是init进程中声明的全局结构体
void Parser::ParseData(const std::string& filename, const std::string& data) {
.......
parse_state state;
.......
std::vector<std::string> args;
for (;;) {
//next_token以行为单位分割参数传递过来的字符串
//最先走到T_TEXT分支
switch (next_token(&state)) {
case T_EOF:
if (section_parser) {
//EOF,解析结束
section_parser->EndSection();
}
return;
case T_NEWLINE:
state.line++;
if (args.empty()) {
break;
}
//创建parser时,会为init.rc中以service,on,import开头的都定义了对应的解析parser
//这里就是根据第一个参数,判断是否有对应的parser
if (section_parsers_.count(args[0])) {
if (section_parser) {
//结束上一个parser的工作,将构造出的对象加入到对应的service_list与action_list中
section_parser->EndSection();
}
//获取参数对应的parser
section_parser = section_parsers_[args[0]].get();
std::string ret_err;
//调用实际parser的ParseSection函数
if (!section_parser->ParseSection(args, &ret_err)) {
parse_error(&state, "%s\\n", ret_err.c_str());
section_parser = nullptr;
}
} else if (section_parser) {
std::string ret_err;
//如果第一个参数不是service,on,import
//则调用前一个parser的ParseLineSection函数
//这里相当于解析一个参数块的子项
if (!section_parser->ParseLineSection(args, state.filename, state.line, &ret_err)) {
parse_error(&state, "%s\\n", ret_err.c_str());
}
}
//清空本次解析的数据
args.clear();
break;
case T_TEXT:
//将本次解析的内容写入到args中
args.emplace_back(state.text);
break;
}
}
}这里的解析看起来比较复杂,在6.0以前的版本中,整个解析是面向过程的。init进程统一调用一个函数来进行解析,然后在该函数中利用switch-case的形式,根据解析的内容进行相应的处理。
在Android 7.0中,为了更好地封装及面向对象,对于不同的关键字定义了不同的parser对象,每个对象通过多态实现自己的解析操作。
在init进程main函数中,创建各种parser的代码如下:
...........
Parser& parser = Parser::GetInstance();
parser.AddSectionParser("service",std::make_unique<ServiceParser>());
parser.AddSectionParser("on", std::make_unique<ActionParser>());
parser.AddSectionParser("import", std::make_unique<ImportParser>());
...........看看三个Parser的定义:
class ServiceParser : public SectionParser {......}
class ActionParser : public SectionParser {......}
class ImportParser : public SectionParser {.......}可以看到三个Parser均是继承SectionParser,具体的实现各有不同,我们以比较常用的ServiceParser和ActionParser为例
ServiceParser
ServiceParser定义于system/core/init/service.cpp中。从前面的代码,我们知道,解析一个service块,首先需要调用ParseSection函数,接着利用ParseLineSection处理子块,解析完所有数据后,调用EndSection。
因此,我们着重看看ServiceParser的这三个函数:
bool ServiceParser::ParseSection(.....) {
.......
const std::string& name = args[1];
.......
std::vector<std::string> str_args(args.begin() + 2, args.end());
//主要根据参数,构造出一个service对象
service_ = std::make_unique<Service>(name, "default", str_args);
return true;
}//注意这里已经在解析子项了
bool ServiceParser::ParseLineSection(......) const {
//调用service对象的HandleLine
return service_ ? service_->HandleLine(args, err) : false;
}bool Service::HandleLine(.....) {
........
//OptionHandlerMap继承自keywordMap<OptionHandler>
static const OptionHandlerMap handler_map;
//根据子项的内容,找到对应的handler函数
//FindFunction定义于keyword模块中,FindFunction方法利用子类生成对应的map中,然后通过通用的查找方法,即比较键值找到对应的处理函数
auto handler = handler_map.FindFunction(args[0], args.size() - 1, err);
if (!handler) {
return false;
}
//调用handler函数
return (this->*handler)(args, err);
}
class Service::OptionHandlerMap : public KeywordMap<OptionHandler> {
...........
Service::OptionHandlerMap::Map& Service::OptionHandlerMap::map() const {
constexpr std::size_t kMax = std::numeric_limits<std::size_t>::max();
static const Map option_handlers = {
{"class", {1, 1, &Service::HandleClass}},
{"console", {0, 0, &Service::HandleConsole}},
{"critical", {0, 0, &Service::HandleCritical}},
{"disabled", {0, 0, &Service::HandleDisabled}},
{"group", {1, NR_SVC_SUPP_GIDS + 1, &Service::HandleGroup}},
{"ioprio", {2, 2, &Service::HandleIoprio}},
{"keycodes", {1, kMax, &Service::HandleKeycodes}},
{"oneshot", {0, 0, &Service::HandleOneshot}},
{"onrestart", {1, kMax, &Service::HandleOnrestart}},
{"seclabel", {1, 1, &Service::HandleSeclabel}},
{"setenv", {2, 2, &Service::HandleSetenv}},
{"socket", {3, 6, &Service::HandleSocket}},
{"user", {1, 1, &Service::HandleUser}},
{"writepid", {1, kMax, &Service::HandleWritepid}},
};
return option_handlers;
}
//以class对应的处理函数为例,可以看出其实就是填充service对象对应的域
bool Service::HandleClass(const std::vector<std::string>& args, std::string* err) {
classname_ = args[1];
return true;
}
//注意此时service对象已经处理完毕
void ServiceParser::EndSection() {
if (service_) {
ServiceManager::GetInstance().AddService(std::move(service_));
}
}
void ServiceManager::AddService(std::unique_ptr<Service> service) {
Service* old_service = FindServiceByName(service->name());
if (old_service) {
ERROR("ignored duplicate definition of service '%s'",
service->name().c_str());
return;
}
//将service对象加入到services_里
//7.0里,services_已经是个vector了
services_.emplace_back(std::move(service));
}总结一下:ServiceParser中,首先根据第一行的名字和参数创建出service对象,然后根据选项域的内容填充service对象,最后将创建出的service对象加入到vector类型的service链表中。
ActionParser
ActionParser定义于system/core/init/action.cpp中。Action的解析过程,其实与Service一样,也是先后调用ParseSection, ParseLineSection和EndSection。
bool ActionParser::ParseSection(....) {
........
//创建出新的action对象
auto action = std::make_unique<Action>(false);
//根据参数,填充action的trigger域,不详细分析了
if (!action->InitTriggers(triggers, err)) {
return false;
}
.........
}
bool ActionParser::ParseLineSection(.......) const {
//构造Action对象的command域
return action_ ? action_->AddCommand(args, filename, line, err) : false;
}
bool Action::AddCommand(.....) {
........
//找出action对应的执行函数
auto function = function_map_->FindFunction(args[0], args.size() - 1, err);
........
//利用所有信息构造出command,加入到action对象中
AddCommand(function, args, filename, line);
return true;
}
void Action::AddCommand(......) {
commands_.emplace_back(f, args, filename, line);
}
void ActionParser::EndSection() {
if (action_ && action_->NumCommands() > 0) {
ActionManager::GetInstance().AddAction(std::move(action_));
}
}
void ActionManager::AddAction(.....) {
........
auto old_action_it = std::find_if(actions_.begin(),
actions_.end(),
[&action] (std::unique_ptr<Action>& a) {
return action->TriggersEqual(*a);
});
if (old_action_it != actions_.end()) {
(*old_action_it)->CombineAction(*action);
} else {
//加入到action链表中,类型也是vector,其中装的是指针
actions_.emplace_back(std::move(action));
}
}可以看出,加载action块的逻辑和service一样,不同的是需要填充trigger和command域。当然,最后解析出的action也需要加入到action链表中。
这里最后还剩下一个问题,那就是哪里定义了Action中command对应处理函数?
答案就是在init.cpp的main函数中:
.......
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
.......Action中调用function_map_->FindFunction时,实际上调用的是BuiltinFunctionMap的FindFunction函数。FindFunction是keyword定义的通用函数,重点是重构的map函数。所以需要看BuiltinFunctionMap,其定义在system/core/init/builtins.cpp:
BuiltinFunctionMap::Map& BuiltinFunctionMap::map() const {
constexpr std::size_t kMax = std::numeric_limits<std::size_t>::max();
static const Map builtin_functions = {
{"bootchart_init", {0, 0, do_bootchart_init}},
{"chmod", {2, 2, do_chmod}},
{"chown", {2, 3, do_chown}},
{"class_reset", {1, 1, do_class_reset}},
{"class_start", {1, 1, do_class_start}},
{"class_stop", {1, 1, do_class_stop}},
{"copy", {2, 2, do_copy}},
{"domainname", {1, 1, do_domainname}},
{"enable", {1, 1, do_enable}},
{"exec", {1, kMax, do_exec}},
{"export", {2, 2, do_export}},
{"hostname", {1, 1, do_hostname}},
{"ifup", {1, 1, do_ifup}},
{"init_user0", {0, 0, do_init_user0}},
{"insmod", {1, kMax, do_insmod}},
{"installkey", {1, 1, do_installkey}},
{"load_pe以上是关于Android Framework学习之init进程解析的主要内容,如果未能解决你的问题,请参考以下文章
Android Framework 之启动 ServiceManager
MVC5 Entity Framework学习之Entity Framework高级功能
Django学习之Rest Framework 的Token验证功能优化详解