ROS1云课→08基础实践(CLI命令行接口)
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS1云课→08基础实践(CLI命令行接口)相关的知识,希望对你有一定的参考价值。
本小节将01-07内容进行单项和综合实践。
对于ROS1、2使用过程中遇到问题,要善于使用开源社区。
ROS开源社区级的概念主要是ROS资源,其能够通过独立的网络社区分享软件和知识。这些资源包括:
- 发行版(Distribution) ROS发行版是可以独立安装、带有版本号的一系列综合功能包。ROS发行版像Linux发行版一样发挥类似的作用。这使得ROS软件安装更加容易,而且能够通过一个软件集合维持一致的版本。
- 软件库(Repository) ROS依赖于共享开源代码与软件库的网站或主机服务,在这里不同的机构能够发布和分享各自的机器人软件与程序。
- ROS维基(ROS Wiki) ROS Wiki是用于记录有关ROS系统信息的主要论坛。任何人都可以注册账户、贡献自己的文件、提供更正或更新、编写教程以及其他行为。
- Bug提交系统(Bug Ticket System)如果你发现问题或者想提出一个新功能,ROS提供这个资源去做这些。
- 邮件列表(Mailing list) ROS用户邮件列表是关于ROS的主要交流渠道,能够像论坛一样交流从ROS软件更新到ROS软件使用中的各种疑问或信息。
- ROS问答(ROS Answer)用户可以使用这个资源去提问题。
- 博客(Blog)你可以看到定期更新、照片和新闻,网址是http://www.ros.org/news。
现在是时候对之前学习的内容进行一些练习了。在下面的课程中,包括练习包的创建,使用节点、参数服务器以及通过Turtlesim移动仿真机器人。
ROS文件系统导览
通过命令行工具来浏览一下ROS的文件系统。解释最常用的部分。
为了获得功能包和功能包集的信息,使用rospack、rosstack、roscd和rosls命令。使用rospack和rosstack来获取有关功能包、功能包集、路径和依赖性等信息。
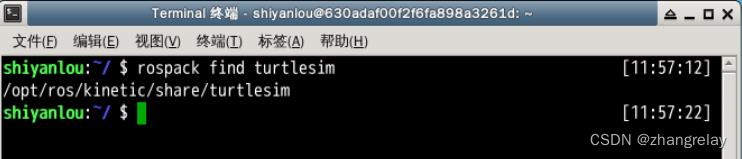
例如,如果想要找turtlesim包的路径,可以使用以下命令:
$ rospack find turtlesim
获得以下信息:
/opt/ros/kinetic/share/turtlesim
同样,如果想要找到已经在系统中安装过的某个综合功能包(元包),示例如下:
$ rosstack find ros_comm
获得到ros-comm综合功能包的路径,如下:
/opt/ros/kinetic/share/ros_comm

想要获得功能包或功能包集下面的文件列表,那么需要使用:
$ rosls turtlesim

之前命令的输出如下所示:
cmake images srv package.xml msg
如果想进入某个文件夹,可以使用roscd命令:
$ roscd turtlesim
$ pwd
获得以下新路径:
/opt/ros/kinetic/share/turtlesim

创建工作空间
在开始具体工作之前,首先创建工作空间。在这个工作空间中,将会完成本课程中使用的所有代码。
若要查看ROS正在使用的工作空间,请使用下面的命令:
$ echo $ROS_PACKAGE_PATH
将会看到如下类似信息:
/opt/ros/kinetic/share:/opt/ros/kinetic/stacks

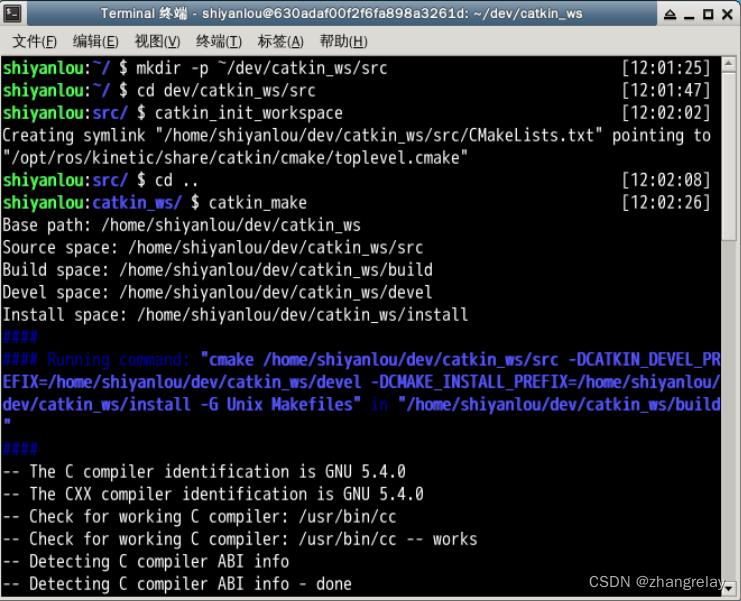
要创建的文件夹是在~/dev/catkin_ws/src/中。若要新建此文件夹,使用下面命令:
$ mkdir –p ~/dev/catkin_ws/src
$ cd ~/dev/catkin_ws/src
$ catkin_init_workspace
当创建工作空间文件夹后,里面并没有功能包,只有CMakeList.txt。下一步是编译工作空间,使用下面命令:
$ cd ~/dev/catkin_ws
$ catkin_make
现在,如果你输入ls命令,可以看到上面命令创建的新文件夹,分别是build和devel文件夹。
完成配置,使用下面命令:
$ source devel/setup.bash
zsh
这一步只是重新加载了setup.bash文件。如果关闭并打开一个新的终端,也将得到同样的效果。应该已经在~/.bashrc文件中加入了该命令行,因为在前面课程用过。如果没有,可以使用下面命令添加它:
$ echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
创建ROS功能包和综合功能包
就像之前所说,也可以手动创建功能包。但是为了避免那些繁琐的工作,最好使用catkin_create_pkg命令行工具。
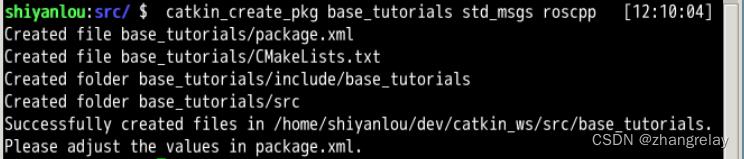
使用以下命令在之前建立的工作空间创建新的功能包:
$ cd ~/dev/catkin_ws/src
$ catkin_create_pkg base_tutorials std_msgs roscpp
此命令的格式包括功能包的名称和依赖项。在这个示例中,依赖项包括std_msgs和roscpp。如以下命令行所示:
catkin_create_pkg [package_name] [dependency1] ... [dependencyN]
这些依赖项包括:
- std_msgs 包含了常见消息类型,表示基本数据类型和其他基本的消息构造,如多维数组。
- roscpp 使用C++实现ROS的各种功能。它提供了一个客户端库,让C++程序员能够调用这些接口快速完成与ROS的主题、服务和参数相关的开发工作。
如果所有步骤都正确执行,结果如下图所示:
正如我们之前看到的,你可以使用rospack、roscd和rosls命令来获取新的功能包信息。下面所示是独立使用的:
- rospack profile 此命令用于通知新添加的内容
- rospack find base_tutorials 此命令用于查找路径。
- rospack depends base_tutorials 此命令用于查看依赖关系。
- rosls base_tutorials 此命令用于查看内容。
- roscd base_tutorials 此命令会更改实际路径。
编译ROS功能包
一旦创建了一个功能包,并且编写了一些代码,就需要编译功能包了。当编译功能包的时候,主要是代码的编译过程。
为了编译功能包,可以使用catkin_make工具:
$ cd ~/dev/catkin_ws/
$ catkin_make
在几秒之后,会看到:
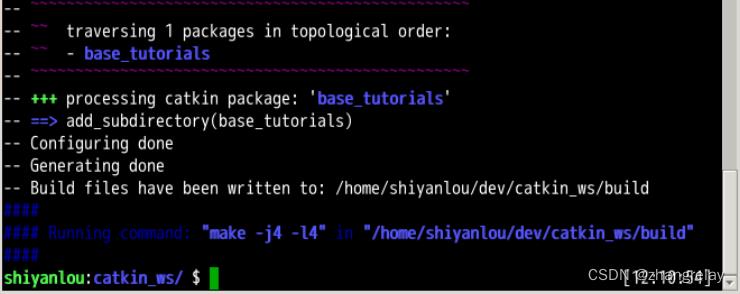
如果没有看到错误提示信息,说明功能包编译成功。
记住必须在工作空间文件夹运行catkin_make命令。如果在其他文件夹这样做,命令无法执行。
$ roscd base_tutorials/
$ catkin_make
当在base_tutorials文件夹试图用catkin_make编译功能包,会看到如下错误:

当在catkin_ws文件夹执行catkin_make命令,则会编译成功。最后,如果编译单个功能包使用如下格式的命令:
$ catkin_make -–pkg <package name>

- rosnode
- rostopic
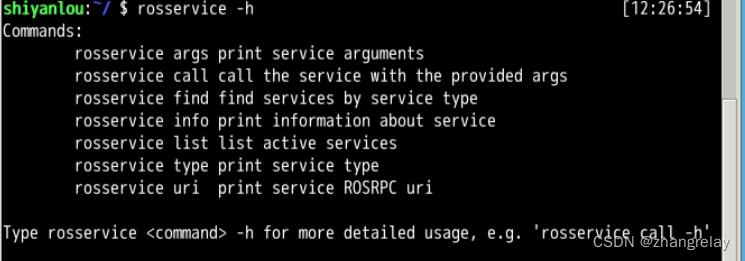
- rosservice
- rosparam
- ……
这些也可以用图形化工具rqt替代使用。
例如:rostopic pub

以上是关于ROS1云课→08基础实践(CLI命令行接口)的主要内容,如果未能解决你的问题,请参考以下文章