tif数据84坐标经纬度转Unity3D坐标
Posted Gusliy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了tif数据84坐标经纬度转Unity3D坐标相关的知识,希望对你有一定的参考价值。
GDAL在Unity3D中的使用以及坐标转换
这是一篇记录帖,应届毕业生一枚,第一次写博客有点小紧张,有大神路过的话也希望帮忙看看对不对~
引言
本文的目的是用Unity读取tif图像数据的经纬度转换成Unity的坐标并放到对应的位置上
开发平台
vs2019+Unity2021.3.6
GDAL下载
首先解决Unity读取tif数据的问题,这里我用了GDAL来读取tif数据,相信有小伙伴不知道怎么配置GDAL,这里我就把我踩坑配置的方法说下。
首先去官网http://www.gisinternals.com/release.php下载Unity的GDAL ,(这里我参考了(2条消息) GDAL在Unity3D中的配置与测试(超详细!)_减肥的吉吉的博客-CSDN博客这位大佬的配置教学)没法科学上网没关系,在csdn上面也有很多GDAL可以下载,自行搜索下载就好。我这里用的是2.4.4版本,(GDAL—release-1911-x64-gdal-2-4-4-mapserver-7-4-3) ,这里不在过多描述导入的过程了。
GDAL使用
我们可以在start函数里面去测试一下导入是否成功,path就是你存放tif的路径,我们这里的w和h就是图片的宽和高。
 如果打印成功了也就证明你导入成功了,可以开始下面步骤了。
如果打印成功了也就证明你导入成功了,可以开始下面步骤了。

新建一个double类型数组,用来储存读取tif时候的数据。

然后利用GDAL的API来进行读取。

该Api会存放给你6个值,这6个值代表了不同的意义,如图下。
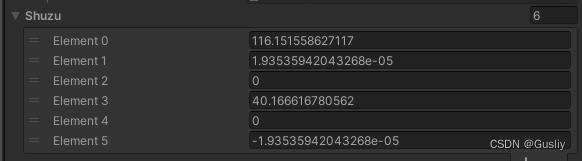
0 和3代表经度和纬度,也就是你读取影像的左上角的经纬度,1代表遥感图像的水平空间分辨率,5代表遥感图像的垂直空间分辨率,一般相等。如果遥感图是正的话没有发生偏转,2和4就是0。
我们可以按照图上的点算出对应点的对应地理坐标,(参考(2条消息) Gdal中GetGeoTransfrom的含义_alexsci的博客-CSDN博客_getgeotransform这位大佬)
如果行数和列数分别为row,column;
xGeo = geoTransform[0] + column * geoTransform[1] + row * geoTransform[2]
yGeo = geoTransform[3] + column * geoTransform[4] + row * geoTransform[5]

我们就可以求出点的四个边角的经纬度了,从而能求出中点的经纬度
把经纬度带到经纬度转3d坐标的方法中即可。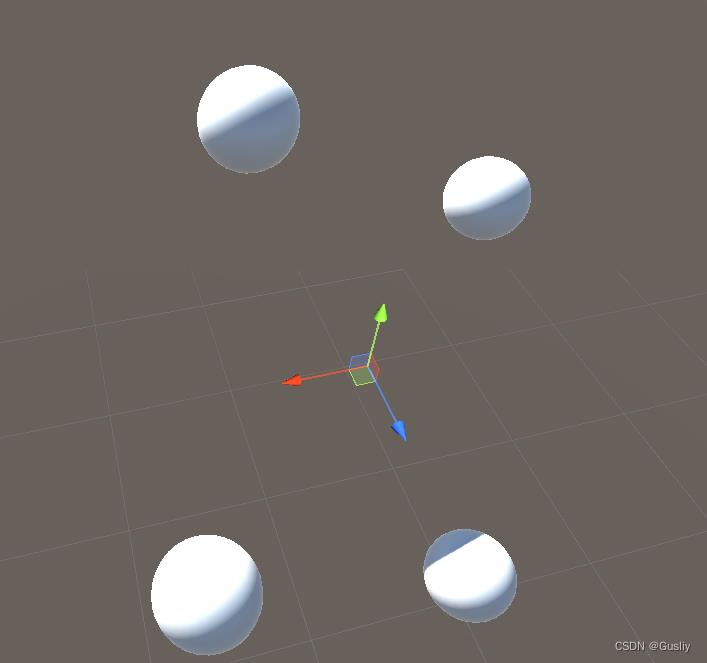

分割线————————————————————————————————
经纬度转世界坐标:
网上有这方面的代码,大家可以自行CV,如果你懒的话当我没说。我这里是翻译的python经纬度转3d坐标的代码。
public class Cartesian3
public double x = 0;
public double y = 0;
public double z = 0;
Transform3D tan = new Transform3D();
public Cartesian3(double x = 0, double y = 0, double z = 0)
this.x = x;
this.y = y;
this.z = z;
public void print()
Console.Write($"x");
#endregion
public class Transform3D
public Transform3D()
/// <summary>
/// 度转角度
/// </summary>
/// <param name="degrees">十进制度/param>
/// <returns>弧度</returns>
public double ToRadians(double degrees)
return degrees * (Math.PI / 180.0);
/// <summary>
/// 向量求模
/// </summary>
/// <param name="cartesian"></param>
/// <returns></returns>
public double MagnitudeSquared(Cartesian3 cartesian)
return cartesian.x * cartesian.x + cartesian.y * cartesian.y + cartesian.z * cartesian.z;
/// <summary>
/// 模的平方
/// </summary>
/// <param name="cartesian"></param>
/// <returns></returns>
public double Magnitude(Cartesian3 cartesian)
return Math.Sqrt(MagnitudeSquared(cartesian));
public Cartesian3 Normalize(Cartesian3 cartesian, Cartesian3 result)
double ma = Magnitude(cartesian);
result.x = cartesian.x / ma;
result.y = cartesian.y / ma;
result.z = cartesian.z / ma;
return result;
public Cartesian3 MultiplyComponents(Cartesian3 left, Cartesian3 right, Cartesian3 result)
result.x = left.x * right.x;
result.y = left.y * right.y;
result.z = left.z * right.z;
return result;
public double dot(Cartesian3 left, Cartesian3 right)
double result = left.x * right.x + left.y * right.y + left.z * right.z;
return result;
public Cartesian3 DivideByScalar(Cartesian3 cartesian, double scalar, Cartesian3 result)
result.x = cartesian.x / scalar;
result.y = cartesian.y / scalar;
result.z = cartesian.z / scalar;
return result;
public Cartesian3 MultiplyByScalar(Cartesian3 cartesian, double scalar, Cartesian3 result)
result.x = cartesian.x * scalar;
result.y = cartesian.y * scalar;
result.z = cartesian.z * scalar;
return result;
public Cartesian3 Add(Cartesian3 left, Cartesian3 right, Cartesian3 result)
result.x = left.x + right.x;
result.y = left.y + right.y;
result.z = left.z + right.z;
return result;
/// <summary>
/// 角度转世界坐标
/// </summary>
/// <param name="longitude"></param>
/// <param name="latitude"></param>
/// <param name="height"></param>
/// <param name="result"></param>
/// <returns></returns>
public Cartesian3 FromRadians(double longitude, double latitude, double height)
Cartesian3 result = new Cartesian3();
Cartesian3 scratchN = new Cartesian3();
Cartesian3 scratchK = new Cartesian3();
Cartesian3 radiiSquared = new Cartesian3(
6378.1370 * 6378.1370,//缩放1000倍
6378.1370 * 6378.1370,
6378.1370 * 6378.1370
//6356752.3142451793 * 6356752.3142451793
);
double cosLatitude = Math.Cos(latitude);
scratchN.x = cosLatitude * Math.Cos(longitude);
scratchN.y = cosLatitude * Math.Sin(longitude);
scratchN.z = Math.Sin(latitude);
scratchN = Normalize(scratchN, scratchN); // 转换为单位向量
scratchK = MultiplyComponents(radiiSquared, scratchN, scratchK);
double gamma = Math.Sqrt(dot(scratchN, scratchK));
scratchK = DivideByScalar(scratchK, gamma, scratchK);
scratchN = MultiplyByScalar(scratchN, height, scratchN);
return Add(scratchK, scratchN, result);
public Cartesian3 FromDegrees(double longitude, double latitude, double height = 0)
longitude = ToRadians(longitude);
latitude = ToRadians(latitude);
return FromRadians(longitude, latitude, height);
[转]地球坐标 火星坐标 百度坐标 相互转换
在开始这个题目之前,先给大家再次扫扫盲,扫的不是坐标系统的盲,而是我们国家所使用的坐标系统。大家都知道,美国GPS使用的是WGS84的坐标系统,以经纬度的形式来表示地球平面上的某一个位置,这应该是国际共识。但在我国,出于国家安全考虑,国内所有导航电子地图必须使用国家测绘局制定的加密坐标系统,即将一个真实的经纬度坐标加密成一个不正确的经纬度坐标,我们在业内将前者称之为地球坐标,后者称之为火星坐标,具体的说明可以参看百度百科中关于火星坐标系统的解释。
1.国内各地图API坐标系统比较
参考http://rovertang.com/labs/map-compare/
结论是:
|
API |
坐标系 |
|
百度地图API |
百度坐标 |
|
腾讯搜搜地图API |
火星坐标 |
|
搜狐搜狗地图API |
搜狗坐标* |
|
阿里云地图API |
火星坐标 |
|
图吧MapBar地图API |
图吧坐标 |
|
高德MapABC地图API |
火星坐标 |
|
灵图51ditu地图API |
火星坐标 |
2.下面是百度官方对百度坐标为何有偏移的解释
国际经纬度坐标标准为WGS-84,国内必须至少使用国测局制定的GCJ-02,对地理位置进行首次加密。百度坐标在此基础上,进行了BD-09二次加密措施,更加保护了个人隐私。百度对外接口的坐标系并不是GPS采集的真实经纬度,需要通过坐标转换接口进行转换。
3.火星坐标系 (GCJ-02) 与百度坐标系 (BD-09) 的转换算法
GCJ-02(火星坐标) 和 BD-09 (百度坐标)
算法代码如下,其中 bd_encrypt 将 GCJ-02 坐标转换成 BD-09 坐标, bd_decrypt 反之。
void bd_encrypt(double gg_lat, double gg_lon, double &bd_lat, double &bd_lon)
{
double x = gg_lon, y = gg_lat;
double z = sqrt(x * x + y * y) + 0.00002 * sin(y * x_pi);
double theta = atan2(y, x) + 0.000003 * cos(x * x_pi);
bd_lon = z * cos(theta) + 0.0065;
bd_lat = z * sin(theta) + 0.006;
}
void bd_decrypt(double bd_lat, double bd_lon, double &gg_lat, double &gg_lon)
{
double x = bd_lon - 0.0065, y = bd_lat - 0.006;
double z = sqrt(x * x + y * y) - 0.00002 * sin(y * x_pi);
double theta = atan2(y, x) - 0.000003 * cos(x * x_pi);
gg_lon = z * cos(theta);
gg_lat = z * sin(theta);
}
4.地球坐标系 (WGS-84) 到火星坐标系 (GCJ-02) 的转换算法
WGS-84 到 GCJ-02 的转换(即 GPS 加偏)算法是一个普通青年轻易无法接触到的“公开”的秘密。这个算法的代码在互联网上是公开的,详情请使用 Google 搜索 "wgtochina_lb" 。
整理后的算法代码请参考 https://on4wp7.codeplex.com/SourceControl/changeset/view/21483#353936 。知道了这个算法之后,就可以离线进行 Google 地图偏移校正,不必像之前那么麻烦。
至于 GCJ-02 到 WGS-84 的转换(即 GPS 纠偏),可以使用二分法。
// // Copyright (C) 1000 - 9999 Somebody Anonymous // NO WARRANTY OR GUARANTEE //
using System;
namespace Navi
{ class EvilTransform
{ const double pi = 3.14159265358979324;
// // Krasovsky 1940 // // a = 6378245.0, 1/f = 298.3 // b = a * (1 - f) // ee = (a^2 - b^2) / a^2; const double a = 6378245.0; const double ee = 0.00669342162296594323;
// // World Geodetic System ==> Mars Geodetic System public static void transform(double wgLat, double wgLon, out double mgLat, out double mgLon) { if (outOfChina(wgLat, wgLon))
{ mgLat = wgLat; mgLon = wgLon; return; } double dLat = transformLat(wgLon - 105.0, wgLat - 35.0); double dLon = transformLon(wgLon - 105.0, wgLat - 35.0); double radLat = wgLat / 180.0 * pi; double magic = Math.Sin(radLat); magic = 1 - ee * magic * magic; double sqrtMagic = Math.Sqrt(magic); dLat = (dLat * 180.0) / ((a * (1 - ee)) / (magic * sqrtMagic) * pi); dLon = (dLon * 180.0) / (a / sqrtMagic * Math.Cos(radLat) * pi); mgLat = wgLat + dLat; mgLon = wgLon + dLon; }
static bool outOfChina(double lat, double lon) { if (lon < 72.004 || lon > 137.8347) return true; if (lat < 0.8293 || lat > 55.8271) return true; return false; }
static double transformLat(double x, double y) { double ret = -100.0 + 2.0 * x + 3.0 * y + 0.2 * y * y + 0.1 * x * y + 0.2 * Math.Sqrt(Math.Abs(x)); ret += (20.0 * Math.Sin(6.0 * x * pi) + 20.0 * Math.Sin(2.0 * x * pi)) * 2.0 / 3.0; ret += (20.0 * Math.Sin(y * pi) + 40.0 * Math.Sin(y / 3.0 * pi)) * 2.0 / 3.0; ret += (160.0 * Math.Sin(y / 12.0 * pi) + 320 * Math.Sin(y * pi / 30.0)) * 2.0 / 3.0; return ret; }
static double transformLon(double x, double y) { double ret = 300.0 + x + 2.0 * y + 0.1 * x * x + 0.1 * x * y + 0.1 * Math.Sqrt(Math.Abs(x)); ret += (20.0 * Math.Sin(6.0 * x * pi) + 20.0 * Math.Sin(2.0 * x * pi)) * 2.0 / 3.0; ret += (20.0 * Math.Sin(x * pi) + 40.0 * Math.Sin(x / 3.0 * pi)) * 2.0 / 3.0; ret += (150.0 * Math.Sin(x / 12.0 * pi) + 300.0 * Math.Sin(x / 30.0 * pi)) * 2.0 / 3.0; return ret; } } }
以上是关于tif数据84坐标经纬度转Unity3D坐标的主要内容,如果未能解决你的问题,请参考以下文章