如何把ply点云导入到UE中 ply点云导入UE4
Posted 安城安编程
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何把ply点云导入到UE中 ply点云导入UE4相关的知识,希望对你有一定的参考价值。
最近因工作需要,研究如何把ply点云导入到UE。
用到的软件有:
UE4,cloudcompare,GlobalMapper.
话不多说,开始介绍:
第一步:获取点云文件

同事给我的点云文件是ply格式的,不可以直接导入UE4。
我们首先用cloudcompare打开:
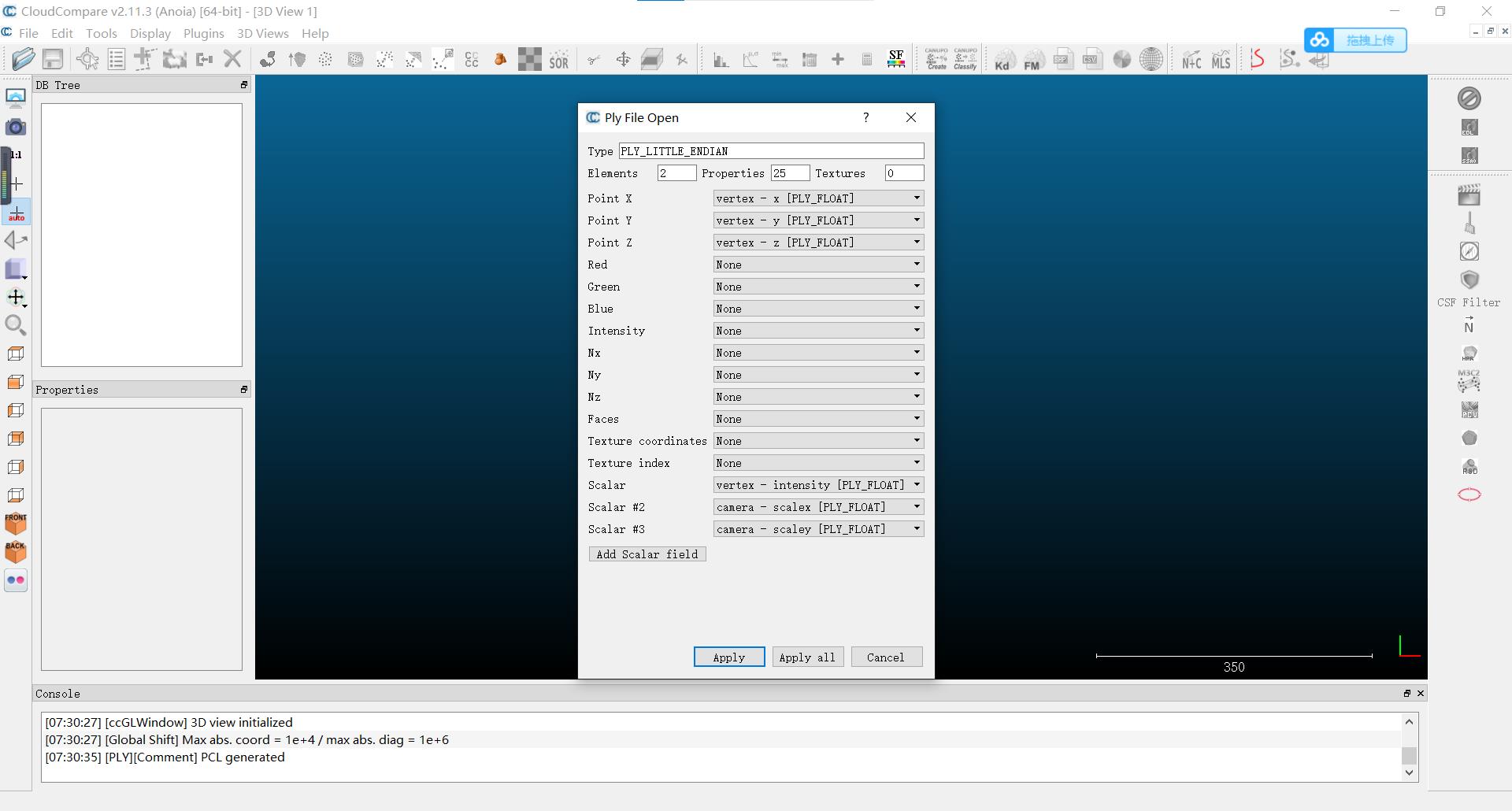
直接apply即可
出现报错不用管

点云导入成功
第二步:第一次格式转换:
*选中模型
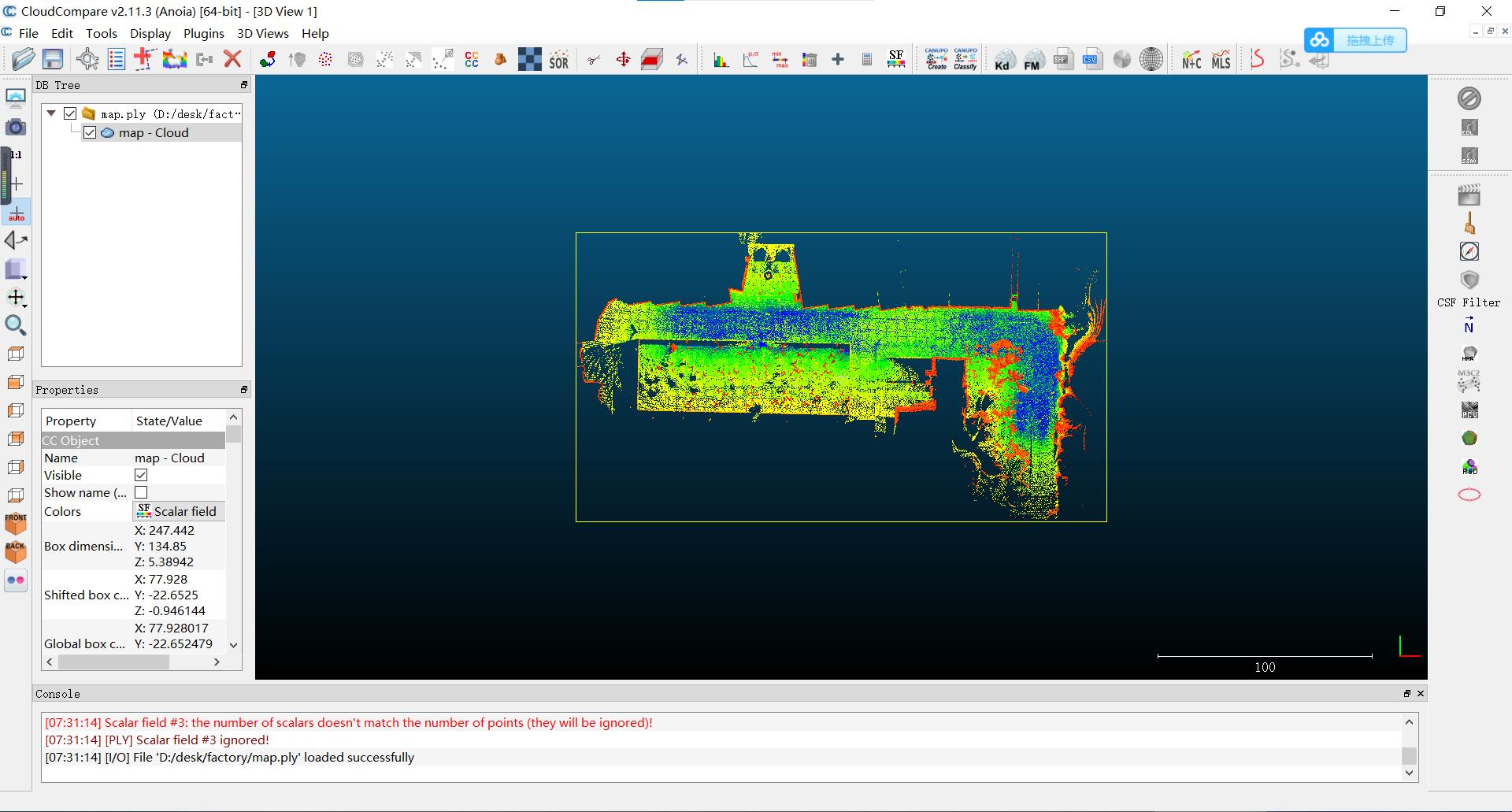
然后点击file-Save:
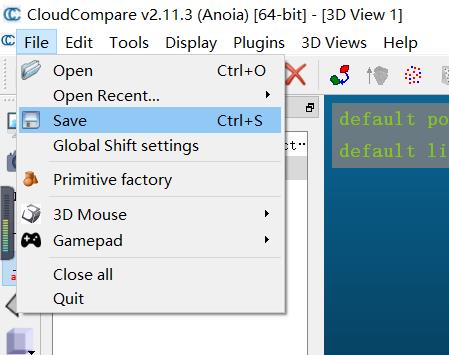
保存如下:

弹出这个窗口,选择ASCII。

就会生成这个啦
第三步:第二次格式转换
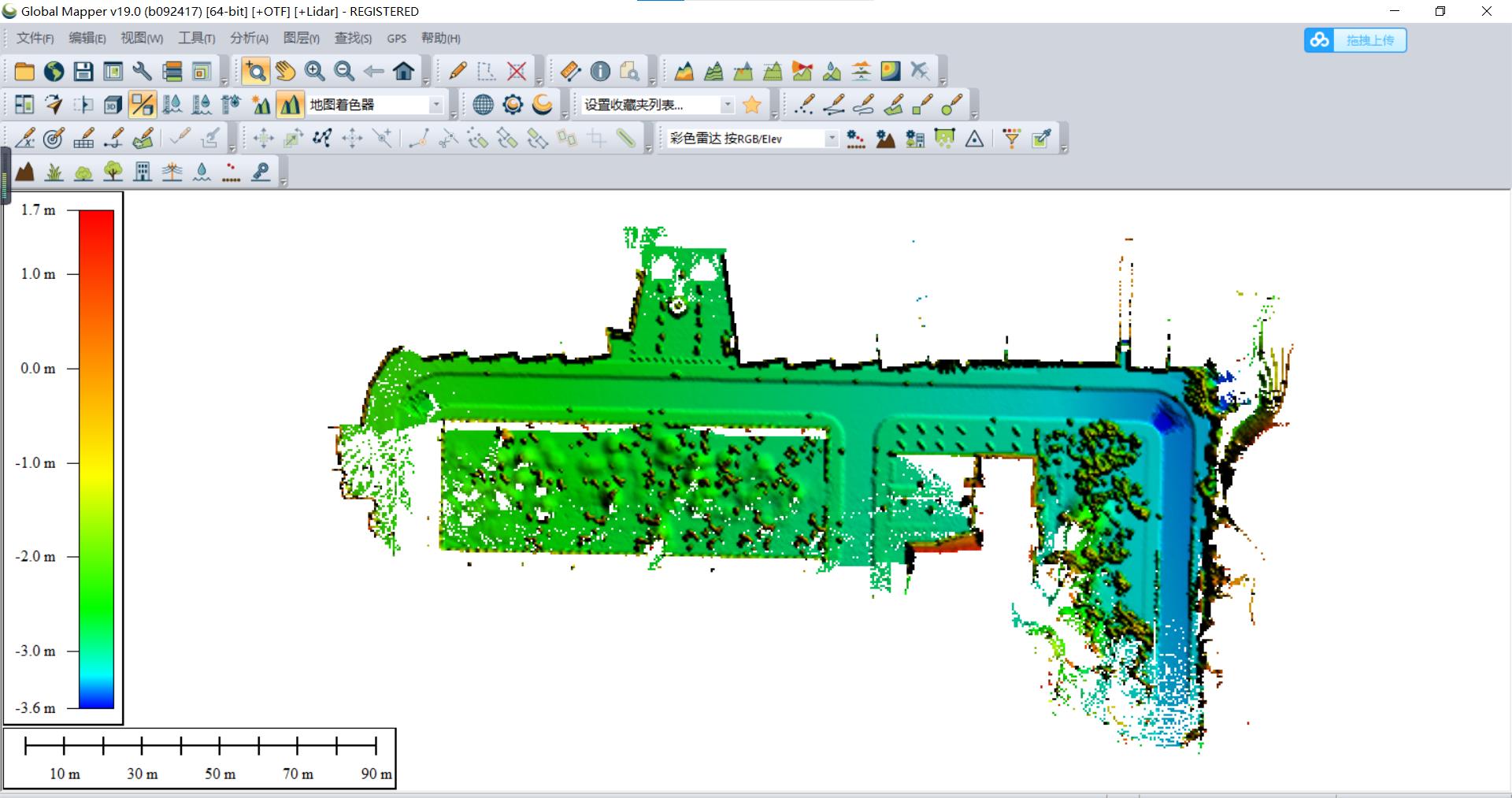
用globalMapper打开map-Cloud.ply
出现上框不用管,直接确定
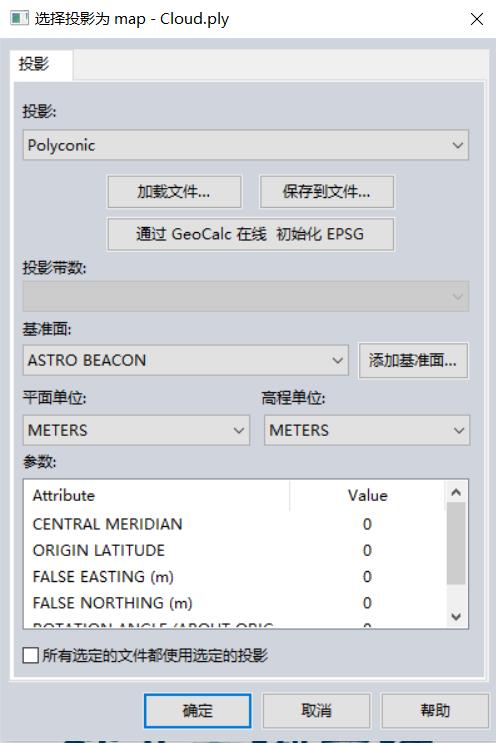
弹出这个框设置如上。。。
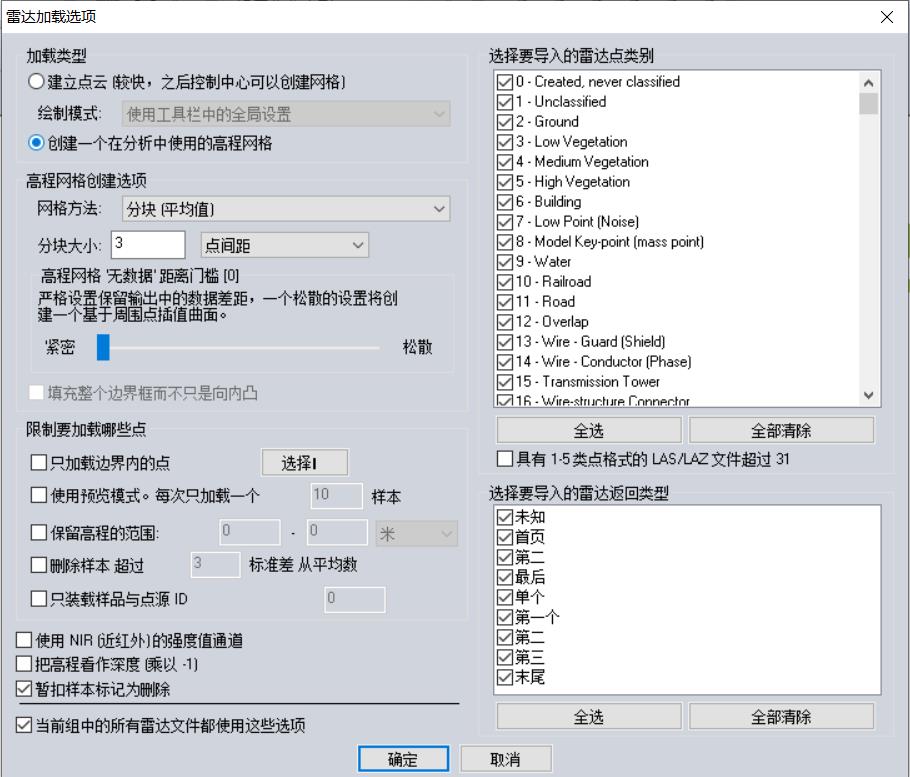
这个框也设置一下
然后会生成这种模型:
点击图层创建图元:
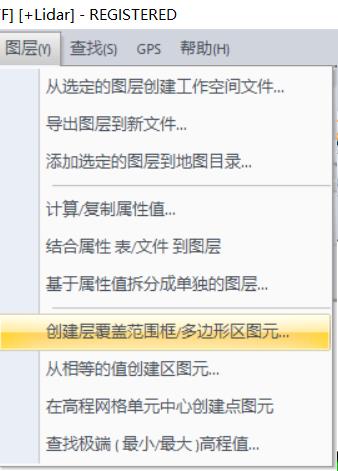
弹出这个后选择否:

点云会建立图元

建立图元后就可以输出啦
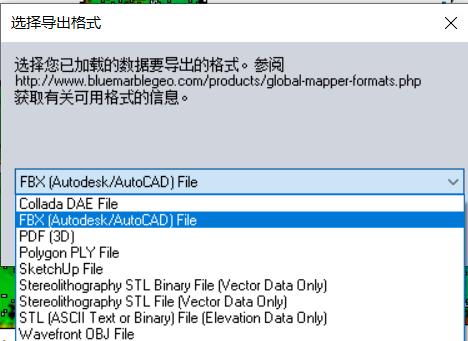
文件-导出-导出3D格式:

导出FBX格式:
设置如下:
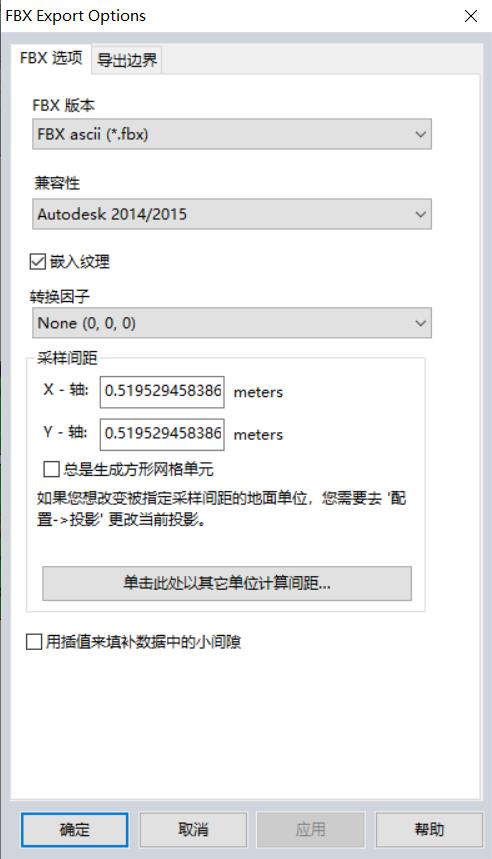
点击确定后就可以导出fbx格式的数据啦

第四步:模型使用:
打开UE4,建立一个初始环境:
点击文件-导入到关卡中:

将刚才生成的shishi2.fbx导入到关卡中:

点云图就导入成功啦:

点云配准 8-pcd与ply文件转换以及数据保存格式:ascll 和二进制转换
一、ply转换为pcd
改变代码保存路径即可
#include <iostream> //标准C++库中的输入输出的头文件
#include <pcl/io/pcd_io.h> //PCD读写类相关的头文件
#include <pcl/io/ply_io.h> //PCD读写类相关的头文件
#include <pcl/point_types.h> //PCL中支持的点类型的头文件
int
main(int argc, char** argv)
pcl::PointCloud<pcl::PointXYZ> *cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPLYFile<pcl::PointXYZ>("E:/COLMAP/Project1/sparse.ply", *cloud) == -1)
PCL_ERROR("Couldn't read file1 \\n");
return (-1);
//把PointCloud对象数据存储在 test_pcd.pcd文件中
pcl::io::savePCDFileASCII("E:/COLMAP/Project1/test_pcd.pcd", *cloud);
//打印输出存储的点云数据
std::cerr << "Saved " << cloud->points.size() << " data points to test_pcd.pcd." << std::endl;
return (0);
二、pcd转换为ply
#include <iostream> //标准C++库中的输入输出的头文件
#include <pcl/io/pcd_io.h> //PCD读写类相关的头文件
#include <pcl/io/ply_io.h> //PCD读写类相关的头文件
#include <pcl/point_types.h> //PCL中支持的点类型的头文件
int
main(int argc, char** argv)
//实例化的模板类PointCloud,每一个点的类型都设置为pcl::PointXYZ
/*************************************************
点PointXYZ类型对应的数据结构
Structure PointXYZ
float x;
float y;
float z;
;
**************************************************/
pcl::PointCloud<pcl::PointXYZ> *cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>("E:/COLMAP/Project1/test_pcd.pcd", *cloud) == -1)
PCL_ERROR("Couldn't read file1 \\n");
return (-1);
//把PointCloud对象数据存储在 test_pcd.pcd文件中
pcl::io::savePLYFileASCII("E:/COLMAP/Project1/my_test_pcd.ply", *cloud);
//打印输出存储的点云数据
std::cerr << "Saved " << cloud->points.size() << " data points to test_pcd.ply." << std::endl;
return (0);
三、ASCII和二进制之间的转换
区别:ASCII可以通过记事本打开,显示大家通俗易懂的数字
二进制:计算机能够直接识别,读取速度快,但是用记事本打开乱码
只需要保存文件对应的代码即可:
pcl::io::savePLYFileASCII() //ascillpcl::io::savePLYFile() //二进制PCD将上面的ply改为pcd
以上是关于如何把ply点云导入到UE中 ply点云导入UE4的主要内容,如果未能解决你的问题,请参考以下文章