YOLO v1深入理解
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了YOLO v1深入理解相关的知识,希望对你有一定的参考价值。
参考技术A YOLO(You Only Look Once)是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度很快,可以用于实时系统。
现在YOLO已经发展到v3版本,不过新版本也是在原有版本基础上不断改进演化的,所以本文先分析YOLO v1版本。
关于 YOLOv2/YOLO9000 的分析理解请移步 YOLO v2 / YOLO 9000 。
输入一张图片,要求输出其中所包含的对象,以及每个对象的位置(包含该对象的矩形框)。
对象识别和定位,可以看成两个任务:找到图片中某个存在对象的区域,然后识别出该区域中具体是哪个对象。
对象识别这件事(一张图片仅包含一个对象,且基本占据图片的整个范围),最近几年基于CNN卷积神经网络的各种方法已经能达到不错的效果了。所以主要需要解决的问题是,对象在哪里。
最简单的想法,就是遍历图片中所有可能的位置,地毯式搜索不同大小,不同宽高比,不同位置的每个区域,逐一检测其中是否存在某个对象,挑选其中概率最大的结果作为输出。显然这种方法效率太低。
RCNN开创性的提出了候选区(Region Proposals)的方法,先从图片中搜索出一些可能存在对象的候选区(Selective Search),大概2000个左右,然后对每个候选区进行对象识别。大幅提升了对象识别和定位的效率。
不过RCNN的速度依然很慢,其处理一张图片大概需要49秒。因此又有了后续的Fast RCNN 和 Faster RCNN,针对 RCNN的神经网络结构和候选区的算法不断改进,Faster RCNN已经可以达到一张图片约0.2秒的处理速度。下图来自 R-CNN, Fast R-CNN, Faster R-CNN, YOLO — Object Detection Algorithms
但总体来说,RCNN系列依然是两阶段处理模式:先提出候选区,再识别候选区中的对象。
YOLO意思是You Only Look Once,创造性的将候选区和对象识别这两个阶段合二为一,看一眼图片(不用看两眼哦)就能知道有哪些对象以及它们的位置。
实际上,YOLO并没有真正去掉候选区,而是采用了预定义的候选区(准确点说应该是预测区,因为并不是Faster RCNN所采用的Anchor)。也就是将图片划分为 7*7=49 个网格(grid),每个网格允许预测出2个边框(bounding box,包含某个对象的矩形框),总共 49*2=98 个bounding box。可以理解为98个候选区,它们很粗略的覆盖了图片的整个区域。
RCNN虽然会找到一些候选区,但毕竟只是候选,等真正识别出其中的对象以后,还要对候选区进行微调,使之更接近真实的bounding box。这个过程就是 边框回归 :将候选区bounding box调整到更接近真实的bounding box。
既然反正最后都是要调整的,干嘛还要先费劲去寻找候选区呢,大致有个区域范围就行了,所以YOLO就这么干了。
不过话说回来,边框回归为啥能起作用,我觉得本质上是因为 分类信息 中已经包含了 位置信息。就像你看到主子的脸和身体,就能推测出耳朵和屁股的位置。
下面具体看下YOLO的实现方案。
1)结构
去掉候选区这个步骤以后,YOLO的结构非常简单,就是单纯的卷积、池化最后加了两层全连接。单看网络结构的话,和普通的CNN对象分类网络几乎没有本质的区别,最大的差异是最后输出层用线性函数做激活函数,因为需要预测bounding box的位置(数值型),而不仅仅是对象的概率。所以粗略来说,YOLO的整个结构就是输入图片经过神经网络的变换得到一个输出的张量,如下图所示。
因为只是一些常规的神经网络结构,所以,理解YOLO的设计的时候,重要的是理解输入和输出的映射关系.
2)输入和输出的映射关系
3)输入
参考图5,输入就是原始图像,唯一的要求是缩放到448*448的大小。主要是因为YOLO的网络中,卷积层最后接了两个全连接层,全连接层是要求固定大小的向量作为输入,所以倒推回去也就要求原始图像有固定的尺寸。那么YOLO设计的尺寸就是448*448。
4)输出
输出是一个 7*7*30 的张量(tensor)。
4.1)7*7网格
根据YOLO的设计,输入图像被划分为 7*7 的网格(grid),输出张量中的 7*7 就对应着输入图像的 7*7 网格。或者我们把 7*7*30 的张量看作 7*7=49个30维的向量,也就是输入图像中的每个网格对应输出一个30维的向量。参考上面图5,比如输入图像左上角的网格对应到输出张量中左上角的向量。
要注意的是,并不是说仅仅网格内的信息被映射到一个30维向量。经过神经网络对输入图像信息的提取和变换,网格周边的信息也会被识别和整理,最后编码到那个30维向量中。
4.2)30维向量
具体来看每个网格对应的30维向量中包含了哪些信息。
① 20个对象分类的概率
因为YOLO支持识别20种不同的对象(人、鸟、猫、汽车、椅子等),所以这里有20个值表示该网格位置存在任一种对象的概率。可以记为 ,之所以写成条件概率,意思是如果该网格存在一个对象Object,那么它是 的概率是 。(记不清条件概率的同学可以参考一下 理解贝叶斯定理 )
② 2个bounding box的位置
每个bounding box需要4个数值来表示其位置,(Center_x,Center_y,width,height),即(bounding box的中心点的x坐标,y坐标,bounding box的宽度,高度),2个bounding box共需要8个数值来表示其位置。
③ 2个bounding box的置信度
bounding box的置信度 = 该bounding box内存在对象的概率 * 该bounding box与该对象实际bounding box的IOU
用公式来表示就是
是bounding box内存在对象的概率,区别于上面第①点的 。Pr(Object)并不管是哪个对象,它体现的是 有或没有 对象的概率。第①点中的 意思是假设已经有一个对象在网格中了,这个对象具体是哪一个。
是 bounding box 与 对象真实bounding box 的IOU(Intersection over Union,交并比)。要注意的是,现在讨论的30维向量中的bounding box是YOLO网络的输出,也就是预测的bounding box。所以 体现了预测的bounding box与真实bounding box的接近程度。
还要说明的是,虽然有时说"预测"的bounding box,但这个IOU是在训练阶段计算的。等到了测试阶段(Inference),这时并不知道真实对象在哪里,只能完全依赖于网络的输出,这时已经不需要(也无法)计算IOU了。
综合来说,一个bounding box的置信度Confidence意味着它 是否包含对象且位置准确的程度。置信度高表示这里存在一个对象且位置比较准确,置信度低表示可能没有对象 或者 即便有对象也存在较大的位置偏差。
简单解释一下IOU。下图来自Andrew Ng的深度学习课程,IOU=交集部分面积/并集部分面积,2个box完全重合时IOU=1,不相交时IOU=0。
总的来说,30维向量 = 20个对象的概率 + 2个bounding box * 4个坐标 + 2个bounding box的置信度
4.3)讨论
① 一张图片最多可以检测出49个对象
每个30维向量中只有一组(20个)对象分类的概率,也就只能预测出一个对象。所以输出的 7*7=49个 30维向量,最多表示出49个对象。
② 总共有 49*2=98 个候选区(bounding box)
每个30维向量中有2组bounding box,所以总共是98个候选区。
③ YOLO的bounding box并不是Faster RCNN的Anchor
Faster RCNN等一些算法采用每个grid中手工设置n个Anchor(先验框,预先设置好位置的bounding box)的设计,每个Anchor有不同的大小和宽高比。YOLO的bounding box看起来很像一个grid中2个Anchor,但它们不是。YOLO并没有预先设置2个bounding box的大小和形状,也没有对每个bounding box分别输出一个对象的预测。它的意思仅仅是对一个对象预测出2个bounding box,选择预测得相对比较准的那个。
这里采用2个bounding box,有点不完全算监督算法,而是像进化算法。如果是监督算法,我们需要 事先 根据样本就能给出一个正确的bounding box作为回归的目标。但YOLO的2个bounding box事先并不知道会在什么位置,只有经过前向计算,网络会输出2个bounding box,这两个bounding box与样本中对象实际的bounding box计算IOU。这时才能确定,IOU值大的那个bounding box,作为负责预测该对象的bounding box。
训练开始阶段,网络预测的bounding box可能都是乱来的,但总是选择IOU相对好一些的那个,随着训练的进行,每个bounding box会逐渐擅长对某些情况的预测(可能是对象大小、宽高比、不同类型的对象等)。所以,这是一种进化或者非监督学习的思想。
另外论文中经常提到 responsible 。比如:Our system divides the input image into an S*S grid. If the center of an object falls into a grid cell, that grid cell is responsible for detecting that object. 这个 responsible 有点让人疑惑,对预测"负责"是啥意思。其实没啥特别意思,就是一个Object只由一个grid来进行预测,不要多个grid都抢着预测同一个Object。更具体一点说,就是在设置训练样本的时候,样本中的每个Object归属到且仅归属到一个grid,即便有时Object跨越了几个grid,也仅指定其中一个。具体就是计算出该Object的bounding box的中心位置,这个中心位置落在哪个grid,该grid对应的输出向量中该对象的类别概率是1(该gird负责预测该对象),所有其它grid对该Object的预测概率设为0(不负责预测该对象)。
还有:YOLO predicts multiple bounding boxes per grid cell. At training time we only want one bounding box predictor to be responsible for each object. 同样,虽然一个grid中会产生2个bounding box,但我们会选择其中一个作为预测结果,另一个会被忽略。下面构造训练样本的部分会看的更清楚。
④ 可以调整网格数量、bounding box数量
7*7网格,每个网格2个bounding box,对448*448输入图像来说覆盖粒度有点粗。我们也可以设置更多的网格以及更多的bounding box。设网格数量为 S*S,每个网格产生B个边框,网络支持识别C个不同的对象。这时,输出的向量长度为:
整个输出的tensor就是:
YOLO选择的参数是 7*7网格,2个bounding box,20种对象,因此 输出向量长度 = 20 + 2 * (4+1) = 30。整个输出的tensor就是 7*7*30。
因为网格和bounding box设置的比较稀疏,所以这个版本的YOLO训练出来后预测的准确率和召回率都不是很理想,后续的v2、v3版本还会改进。当然,因为其速度能够满足实时处理的要求,所以对工业界还是挺有吸引力的。
5)训练样本构造
作为监督学习,我们需要先构造好训练样本,才能让模型从中学习。
对于一张输入图片,其对应输出的7*7*30张量(也就是通常监督学习所说的标签y或者label)应该填写什么数据呢。
首先,输出的 7*7维度 对应于输入的 7*7 网格。
然后具体看下30维向量的填写(请对照上面图6)。
① 20个对象分类的概率
对于输入图像中的每个对象,先找到其中心点。比如图8中的自行车,其中心点在黄色圆点位置,中心点落在黄色网格内,所以这个黄色网格对应的30维向量中,自行车的概率是1,其它对象的概率是0。所有其它48个网格的30维向量中,该自行车的概率都是0。这就是所谓的"中心点所在的网格对预测该对象负责"。狗和汽车的分类概率也是同样的方法填写。
② 2个bounding box的位置
训练样本的bounding box位置应该填写对象实际的bounding box,但一个对象对应了2个bounding box,该填哪一个呢?上面讨论过,需要根据网络输出的bounding box与对象实际bounding box的IOU来选择,所以要在训练过程中动态决定到底填哪一个bounding box。参考下面第③点。
③ 2个bounding box的置信度
上面讨论过置信度公式
可以直接计算出来,就是用网络输出的2个bounding box与对象真实bounding box一起计算出IOU。
然后看2个bounding box的IOU,哪个比较大(更接近对象实际的bounding box),就由哪个bounding box来负责预测该对象是否存在,即该bounding box的 ,同时对象真实bounding box的位置也就填入该bounding box。另一个不负责预测的bounding box的 。
总的来说就是,与对象实际bounding box最接近的那个bounding box,其 ,该网格的其它bounding box的 。
举个例子,比如上图中自行车的中心点位于4行3列网格中,所以输出tensor中4行3列位置的30维向量如下图所示。
翻译成人话就是:4行3列网格位置有一辆自行车,它的中心点在这个网格内,它的位置边框是bounding box1所填写的自行车实际边框。
注意,图中将自行车的位置放在bounding box1,但实际上是在训练过程中等网络输出以后,比较两个bounding box与自行车实际位置的IOU,自行车的位置(实际bounding box)放置在IOU比较大的那个bounding box(图中假设是bounding box1),且该bounding box的置信度设为1。
6)损失函数
损失就是网络实际输出值与样本标签值之间的偏差。
YOLO给出的损失函数如下
公式中
意思是网格i中存在对象。
意思是网格i的第j个bounding box中存在对象。
意思是网格i的第j个bounding box中不存在对象。
总的来说,就是用网络输出与样本标签的各项内容的误差平方和作为一个样本的整体误差。
损失函数中的几个项是与输出的30维向量中的内容相对应的。
① 对象分类的误差
公式第5行,注意 意味着存在对象的网格才计入误差。
② bounding box的位置误差
公式第1行和第2行。
a)都带有 意味着只有"负责"(IOU比较大)预测的那个bounding box的数据才会计入误差。
b)第2行宽度和高度先取了平方根,因为如果直接取差值的话,大的对象对差值的敏感度较低,小的对象对差值的敏感度较高,所以取平方根可以降低这种敏感度的差异,使得较大的对象和较小的对象在尺寸误差上有相似的权重。
c)乘以 调节bounding box位置误差的权重(相对分类误差和置信度误差)。YOLO设置 ,即调高位置误差的权重。
③ bounding box的置信度误差
公式第3行和第4行。
a)第3行是存在对象的bounding box的置信度误差。带有 意味着只有"负责"(IOU比较大)预测的那个bounding box的置信度才会计入误差。
b)第4行是不存在对象的bounding box的置信度误差。因为不存在对象的bounding box应该老老实实的说"我这里没有对象",也就是输出尽量低的置信度。如果它不恰当的输出较高的置信度,会与真正"负责"该对象预测的那个bounding box产生混淆。其实就像对象分类一样,正确的对象概率最好是1,所有其它对象的概率最好是0。
c)第4行会乘以 调节不存在对象的bounding box的置信度的权重(相对其它误差)。YOLO设置 ,即调低不存在对象的bounding box的置信度误差的权重。
7)训练
YOLO先使用ImageNet数据集对前20层卷积网络进行预训练,然后使用完整的网络,在PASCAL VOC数据集上进行对象识别和定位的训练和预测。YOLO的网络结构如下图所示:
YOLO的最后一层采用线性激活函数,其它层都是Leaky ReLU。训练中采用了drop out和数据增强(data augmentation)来防止过拟合。更多细节请参考原论文。
8)预测(inference)
训练好的YOLO网络,输入一张图片,将输出一个 7*7*30 的张量(tensor)来表示图片中所有网格包含的对象(概率)以及该对象可能的2个位置(bounding box)和可信程度(置信度)。
为了从中提取出最有可能的那些对象和位置,YOLO采用NMS(Non-maximal suppression,非极大值抑制)算法。
9)NMS(非极大值抑制)
NMS方法并不复杂,其核心思想是:选择得分最高的作为输出,与该输出重叠的去掉,不断重复这一过程直到所有备选处理完。
YOLO的NMS计算方法如下。
网络输出的7*7*30的张量,在每一个网格中,对象 位于第j个bounding box的得分:
它代表着某个对象 存在于第j个bounding box的可能性。
每个网格有:20个对象的概率*2个bounding box的置信度,共40个得分(候选对象)。49个网格共1960个得分。Andrew Ng建议每种对象分别进行NMS,那么每种对象有 1960/20=98 个得分。
NMS步骤如下:
1)设置一个Score的阈值,低于该阈值的候选对象排除掉(将该Score设为0)
2)遍历每一个对象类别
2.1)遍历该对象的98个得分
2.1.1)找到Score最大的那个对象及其bounding box,添加到输出列表
2.1.2)对每个Score不为0的候选对象,计算其与上面2.1.1输出对象的bounding box的IOU
2.1.3)根据预先设置的IOU阈值,所有高于该阈值(重叠度较高)的候选对象排除掉(将Score设为0)
2.1.4)如果所有bounding box要么在输出列表中,要么Score=0,则该对象类别的NMS完成,返回步骤2处理下一种对象
3)输出列表即为预测的对象
10)小结
YOLO以速度见长,处理速度可以达到45fps,其快速版本(网络较小)甚至可以达到155fps。这得益于其识别和定位合二为一的网络设计,而且这种统一的设计也使得训练和预测可以端到端的进行,非常简便。
不足之处是小对象检测效果不太好(尤其是一些聚集在一起的小对象),对边框的预测准确度不是很高,总体预测精度略低于Fast RCNN。主要是因为网格设置比较稀疏,而且每个网格只预测两个边框,另外Pooling层会丢失一些细节信息,对定位存在影响。
更多细节请参考原论文。
最后,如果你竟然坚持看到这里,觉得还有所帮助的话,请点个赞:)๑۩۞۩๑
You Only Look Once: Unified, Real-Time Object Detection
Andrew Ng的深度学习工程师 - 04卷积神经网络
图解YOLO
你真的读懂yolo了吗?
目标检测|YOLO原理与实现
深入浅出 Yolo 系列之 Yolov7 基础网络结构详解
从 2015 年的 YOLOV1,2016 年 YOLOV2,2018 年的 YOLOV3,到 2020 年的 YOLOV4、 YOLOV5, 以及最近出现的 YOLOV76 和 YOLOV7 可以说 YOLO 系列见证了深度学习时代目标检测的演化。对于 YOLO 的基础知识以及 YOLOV1 到 YOLOV5 可以去看大白的 YOLO 系列,本文主要对 YOLOV7 的网络结构进行一个梳理,便于大家直观的感受。
1. YOLOV7 整体结构
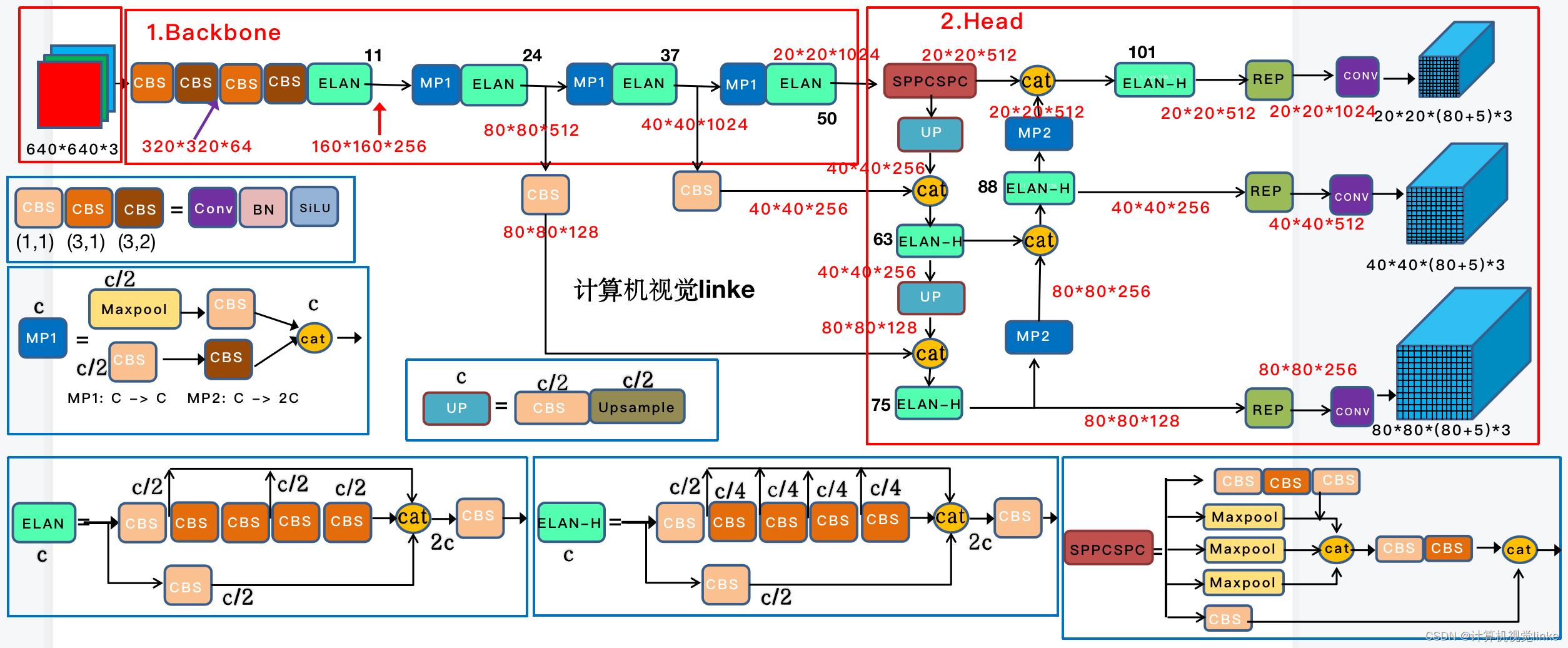
我们先整体来看下 YOLOV7,首先对输入的图片 resize 为 640x640 大小,输入到 backbone 网络中,然后经 head 层网络输出三层不同 size 大小的 feature map,经过 Rep 和 conv输出预测结果,这里以 coco 为例子,输出为 80 个类别,然后每个输出(x ,y, w, h, o) 即坐标位置和前后背景,3 是指的 anchor 数量,因此每一层的输出为 (80+5)x3 = 255再乘上 feature map 的大小就是最终的输出了。
2. backbone
YOLOV7 的 backbone 如下图所示
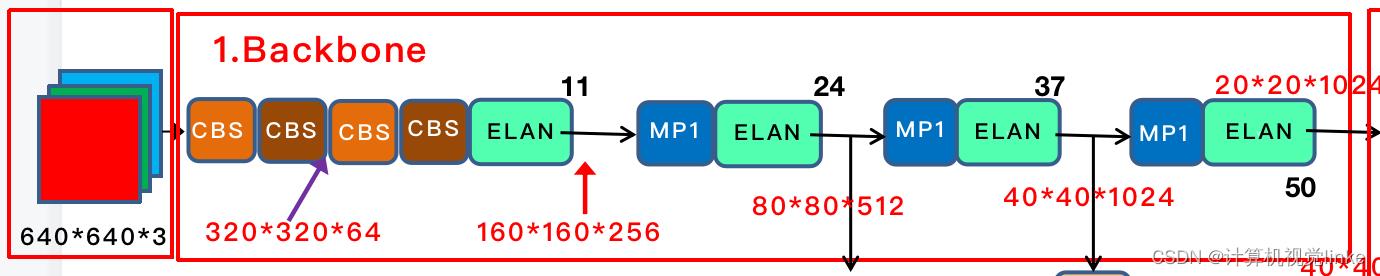
总共有 50 层, 我在上图用黑色数字把关键层数标示出来了。
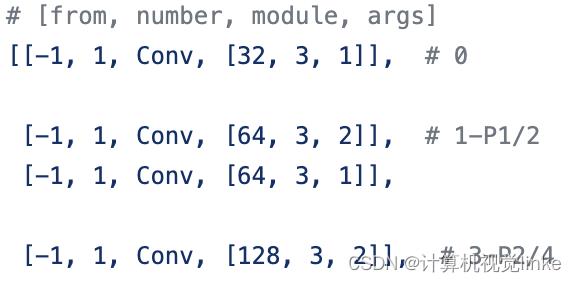
首先是经过 4 层卷积层,如下图,CBS 主要是 Conv + BN + SiLU 构成,我在图中用不同的颜色表示不同的 size 和 stride, 如 (3, 2) 表示卷积核大小为 3 ,步长为 2。 在 config 中的配置如图。

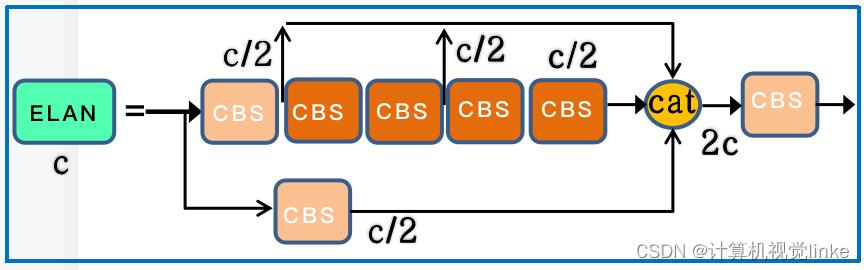
经过 4个 CBS 后,特征图变为 160 * 160 * 128 大小。随后会经过论文中提出的 ELAN 模块,ELAN 由多个 CBS 构成,其输入输出特征大小保持不变,通道数在开始的两个 CBS 会有变化, 后面的几个输入通道都是和输出通道保持一致的,经过最后一个 CBS 输出为需要的通道。


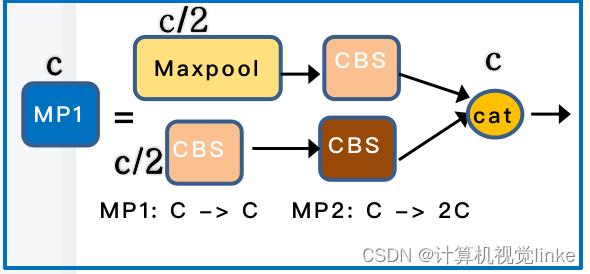
MP 层 主要是分为 Maxpool 和 CBS , 其中 MP1 和 MP2 主要是通道数的比变化。
backbone的基本组件就介绍完了,我们整体来看下 backbone,经过 4 个 CBS 后,接入例如一个 ELAN ,然后后面就是三个 MP + ELAN 的输出,对应的就是 C3/C4/C5 的输出,大小分别为 80 * 80 * 512 , 40 * 40 * 1024, 20 * 20 * 1024。 每一个 MP 由 5 层, ELAN 有 8 层, 所以整个 backbone 的层数为 4 + 8 + 13 * 3 = 51 层, 从 0 开始的话,最后一层就是第 50 层。
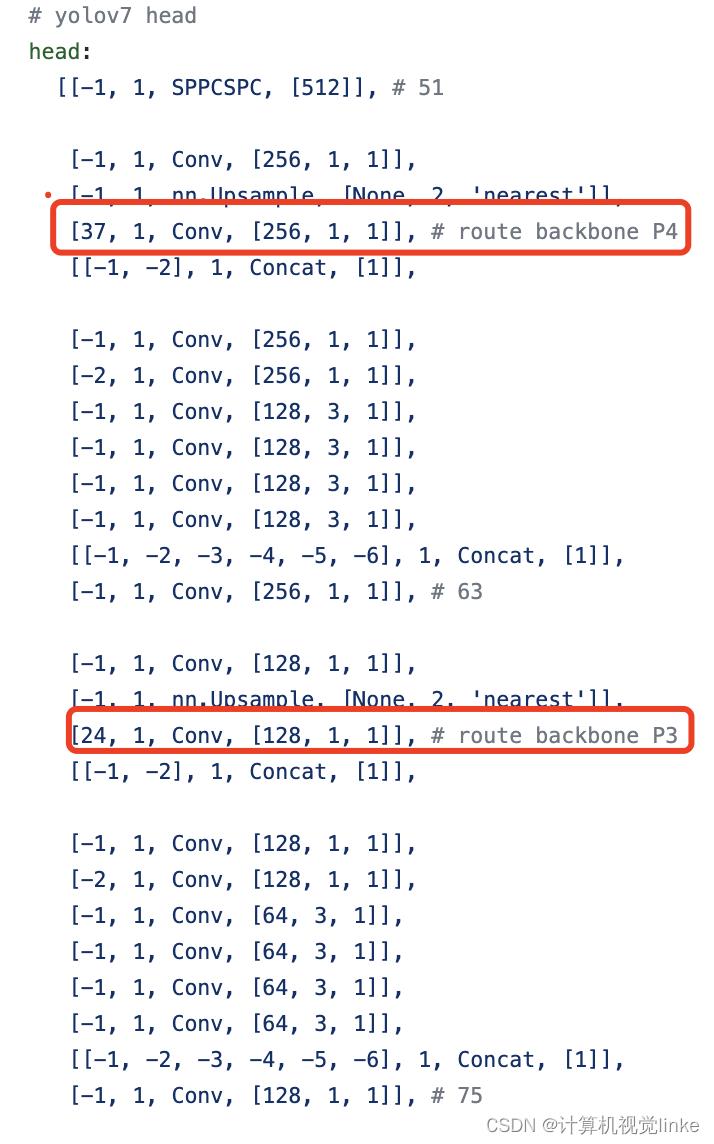
3. head
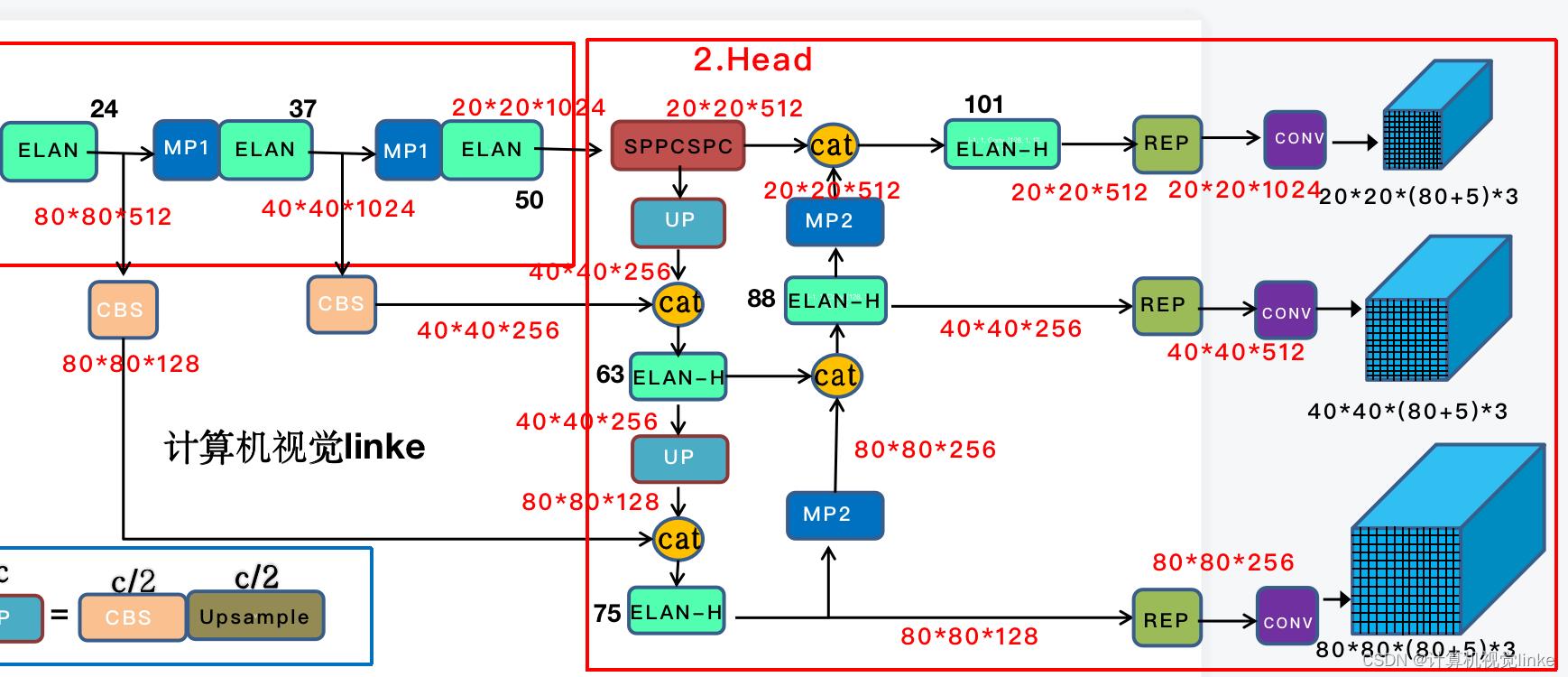
YOLOV7 head 其实就是一个 pafpn 的结构,和之前的YOLOV4,YOLOV5 一样。首先,对于 backbone 最后输出的 32 倍降采样特征图 C5,然后经过 SPPCSP,通道数从1024变为512。先按照 top down 和 C4、C3融合,得到 P3、P4 和 P5;再按 bottom-up 去和 P4、P5 做融合。

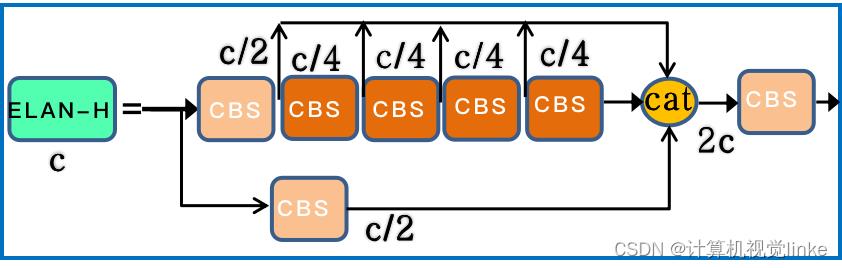
这里基本和 YOLOV5 是一样的,区别在于将 YOLOV5 中的 CSP 模块换成了 ELAN-H 模块, 同时下采样变为了 MP2 层。 ELAN-H 模块是我自己命名的,它和 backbone 中的 ELAN 稍微有点区别就是 cat 的数量不同。
至于 E-ELAN 论文中说到是在 YOLOV7-E6eE中用到, 但是我在看代码的时候,有点没太明白是怎么做 shuffle 的,这里等我弄明白了再补上来。

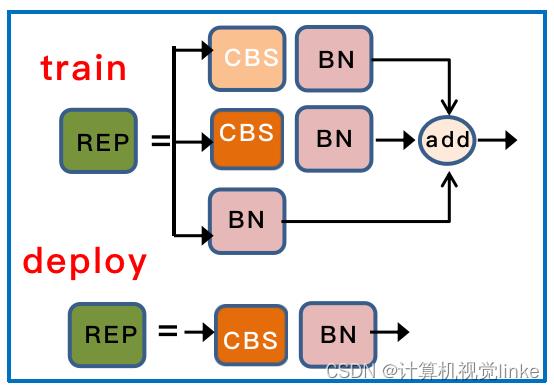
对于 pafpn 输出的 P3、P4 和 P5 , 经过 RepConv 调整通道数,最后使用 1x1 卷积去预测 objectness、class 和 bbox 三部分。
RepConv 在训练和推理是有一定的区别。训练时有三个分支的相加输出,部署时会将分支的参数重参数化到主分支上。
end
至此,我们将 YOLOV7 的基本结构介绍完了,至于 YOLOv7 的其他知识,如Aux Head 等以及 YOLOv7 的其他网络结构,我们后续再讲。 梳理可能有未理解正确的地方,欢迎交流。
以上是关于YOLO v1深入理解的主要内容,如果未能解决你的问题,请参考以下文章