第十八届全国大学生智能汽车竞赛 智能视觉组比赛细则补充规定
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第十八届全国大学生智能汽车竞赛 智能视觉组比赛细则补充规定相关的知识,希望对你有一定的参考价值。
该文档对于最初公布的智能视觉组细则中存在的缺陷进行改进和细化,一方面保证已经按照最初技术文档完成的车模能够实现比赛要求,同时又能够引导同学进一步提高目标分类模型的性能,同时避免人机交互中的规则漏洞。与 最初的文档相比 有以下改变:
一、车库尺寸
考虑到有辅助车模的存在,将车库尺寸扩大到100cm*45cm,小车从车库出发,比赛完成后自行回到车库,如制作有两辆车模,则两辆车均需要从车库出发并回到车库,车库位于原点位置X轴下方,如下图所示:
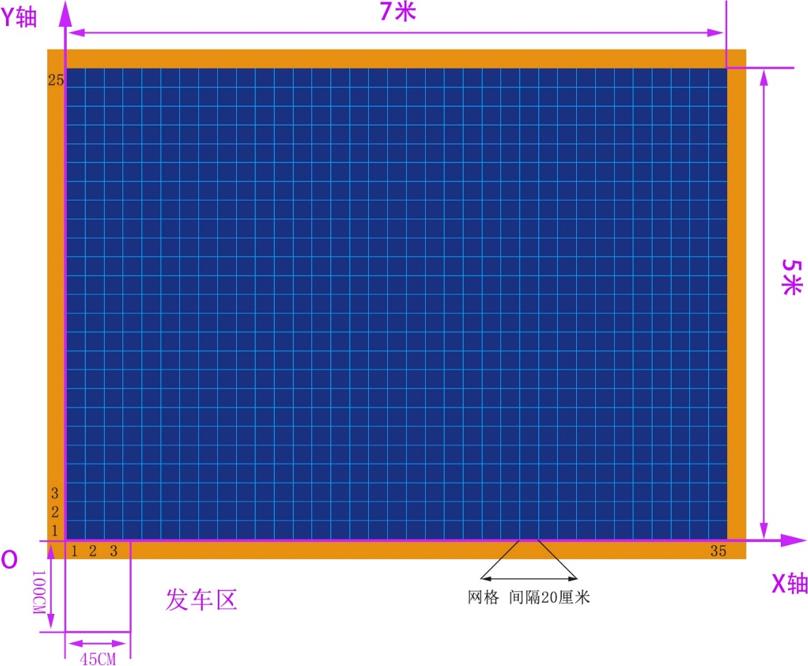
▲ 图1.1 车库尺寸示意图
二、罚时标准
修改罚时标准,比赛计时从车模自车库出发触发计时器进入场地到车模回到出发区为止,车模完成任务后没有回到车库或有两个及以上的车轮冲出车库,均算作入库失败,加罚 15 秒。每一个搬运错误或搜索遗漏均罚时30秒。不允许出车库后只完成少量识别和搬运就直接回到车库的比赛方式,需至少完成60%以上的图片目标识别和搬运,则可以选择剩余部分不识别搬运,回到车库。按罚时标准加罚放弃和错误的部分即可。
三、无框目标板
增加无框目标板的说明和示意图,在第十八届的比赛中,目标板图片中还存在一定数量的没有黄色边框图片。这类图片在赛场中的位置是随机摆放,它们的位置不会出现在最初的位置A4纸上。无边框图片边长为12cm。如下图所示:
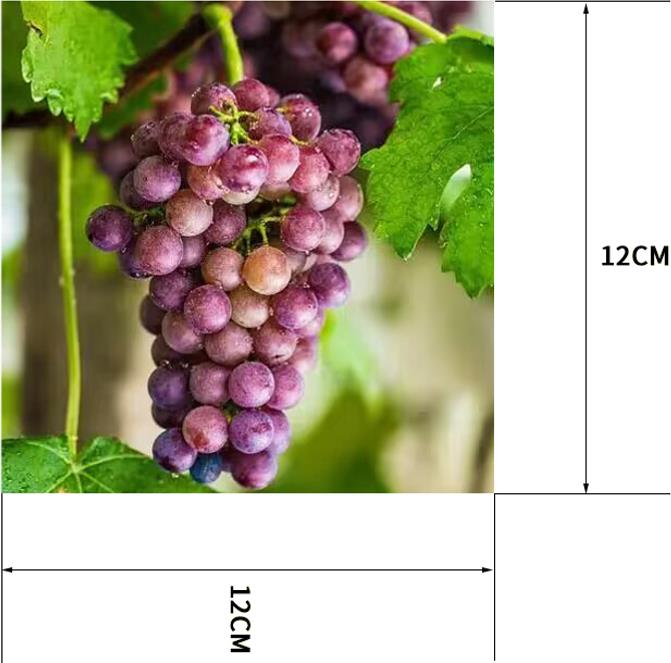
▲ 图3.1 无框目标板示意图
四、分类递进要求
分类搬运要求按比赛阶段递进,其中分赛区选拔赛的预赛和决赛的搬运要求有所区别,分赛区预赛按下图所示区域进行搬运。
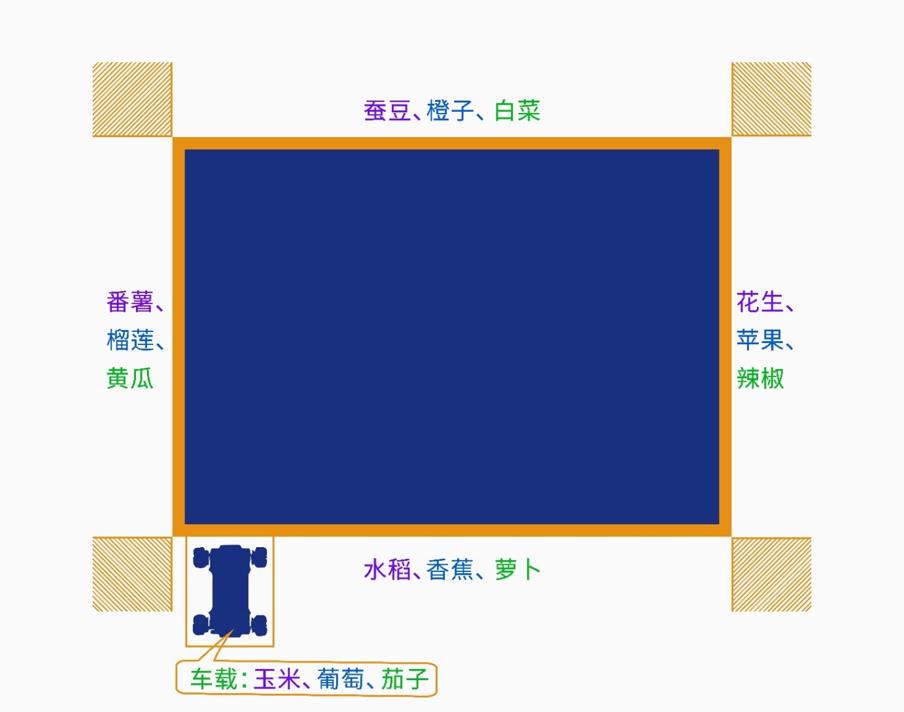
▲ 图4.1 预赛搬运要求
分赛区决赛阶段要求当前比赛队伍在三大类中现场随机抽签,被抽到的1个大类(粮食、水果、蔬菜其中之一)需要单独放置在下图所示的赛场左上角1米范围内。全国总决赛的预赛和决赛都均按下图所示的搬运放置区域示意图进行。
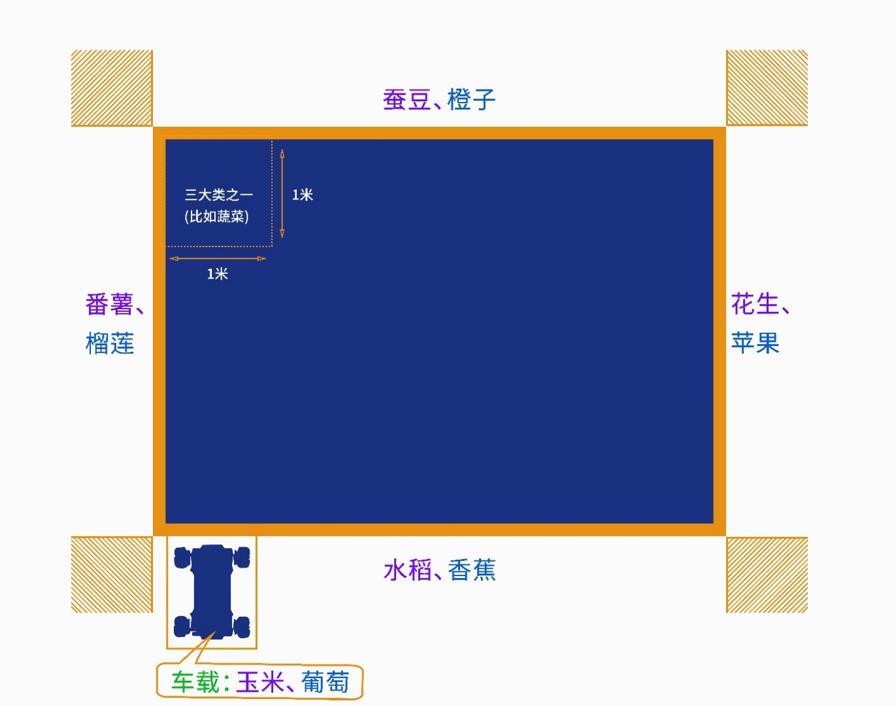
▲ 图4.2 决赛搬运要求
五、图标间隔
最终比赛时两个相邻图片目标板至少间隔两个空格。
六、人机交互
为了进一步规范比赛过程, 下面给出人机交互及协助搬运车的相关细节要求。
智能视觉组允许增加语音人机交互,主要依靠语音交互在比赛中实现参赛队员通过语音在场外控制车模运行以便于协助找到目标。 要求是不允许使用 成品的语音模块, 必须使用恩智浦单片机 自行完成语音检测识别;为了保证语音交互不涉及到目标板内容的识别,正式比赛时,喊口令的比赛选手只能通过比赛现场准的PC屏幕看到场地,根据摄像头的画质和距离来确保喊口令的参赛同学只能看到场内车模和目标板的位置,但无法看清目标板的内容,然后有这名参赛同学对着这台PC喊出口令,PC端的软件会通过局域网WiFi将语音信息发送给主车,主车通过WiFi模块收到语音信号,完成语音口令识别,执行语音口令。口令仅包含:前、后、左、右4种,不允许喊出其他口令,否则当次比赛成绩无效。
智能视觉组允许双车协同,即允许制作两辆车模协同作业,但两个车模不是一模一样的车模。要求其中一辆是主车模, 另一辆只能负责协同搬运,类似联合收割机和搬运车,两车可以单向通信,由主车发送命令,协同车接收命令。 在目标识别搬运过程中, 识别与搬运是主车的任务, 协同搬运车只能作为辅助搬运车模将目标板搬运到规定区域,协同车不允许安装视觉识别模块OpenART mini,只允许安装导航用的普通摄像头,协同车不能对目标进行识别,但可以安装拾取装置,作为执行机构跟在主车旁边或自行分区域按主车指令进行拾取和搬运来配合完成分类。基本流程是主车完成识别后,发送识别结果给协同车,此时可以由主车自己完成拾取和搬运,也可以主车通过无线通信通知协助车完成拾取和搬运,搬运完成后两车均需回到车库。正式比赛时主车和协同车所使用的通信模块依然需要使用赛场提供的蓝牙模块,平时训练使用普通的蓝牙、无线等通信模块都可以,正式比赛的通信模块接口定义将在下文给出,正式比赛时在现场换上即可。
协同搬运和语音人机交互, 是可选的内容, 以提高比赛效率,也可以选择不增加协助搬运小车和语音识别功能,直接用单车完成。若需要制作语音识别和协助搬运车,可以 免费申请一套通信模块 用于训练和模拟比赛,申请链接:http://seekfree.mikecrm.com/O2IKbpw
一套通信模块包含下图所示3种模块,其中串口WiFi模块用于接收PC给主车发送语音信息,数据转发串口模块用于主车发送信息给辅助车,9141蓝牙模块用于辅助车接收主车发送的信息。

▲ 图6.1 通讯模块
七、目标拾取
车模允许使用电磁铁对图片目标进行拾取,电磁铁数量不限。车模允许设计各类型的机械臂或分类搬运装置,其中用于制作机械臂或分类搬运装置的伺服电机(包括舵机、电机、步进电机)数量每辆车不超过5个。
八、传感器
模作品中允许使用(不限于)摄像头、IMU、电子罗盘、光电管等。如果使用摄像头,则每辆车搭载的摄像头的个数不超过3个。除OpenART mini外,其他所用传感器中不得含有MCU,若自制传感器,则允许含有NXP公司的MCU。其中辅助车模的摄像头只允许使用辅助导航的普通摄像头(无MCU,只能输出图像原始数据)。
九、车模通讯
为了使得双车可以通信,但又需要避免主车在比赛中不能和其他无线通信模块连接进行通信,所以在参加正式比赛时主车需要更换为组委会提供的蓝牙数据转发模块来发送命令,该蓝牙模块只有发送功能,没有接收功能,可以确保主车不能收到场外的无线信息,需要主车按以下要求预留接口,以便于正式比赛时方便更换。无线通讯模块在竞赛的时候由竞赛组委会提供,它自带电源。
1、物理结构
外部接口为3pin,100mil的插座接口(母头)。
无线通信模块接头定义:
- 红线:+3.3V
- 黑线:地线
- 黄线:TXD
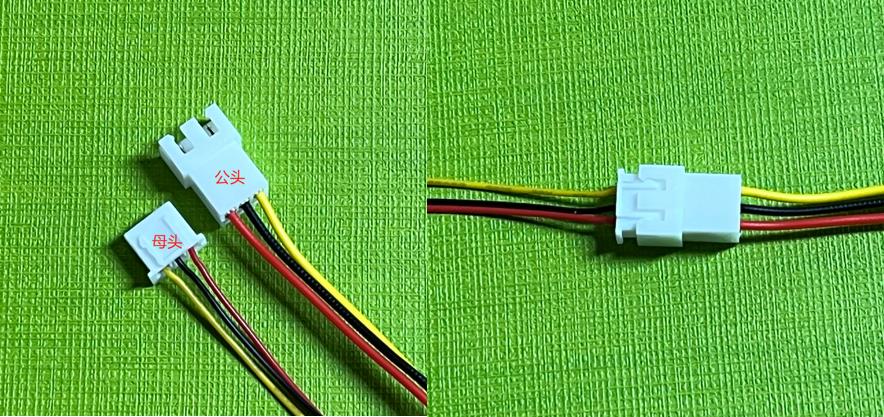
▲ 图9.1 无线通讯模块结构示意图
参赛车模的电路板上需要有无线通信接口插座,或者公头空中接头。
2、电气定义
接口采用UART发送模式。信号电平采用 TTL电平。
接口电气协议:
- 低电平:小于0.5V
- 高电平:2V ~ 5V
- 空闲位:高电平
3、通讯协议
接口底层协议:
- 波特率:115200
- 数据位:8位
- 停止位:1位
- 奇偶校验:无
4、辅助车模电路接口
辅助车模的通信模块请使用蓝牙模块,现场比赛时,为减少现场配对带来的麻烦,竞赛组委会会提前准备配对好的主车数据转发模块和辅助车普通蓝牙模块,为方便插到辅助车上,请在辅助车电路板上预留统一的2.54间距24排母接口,推荐用24是为了插接更稳定,接口电气顺序请参考下图。
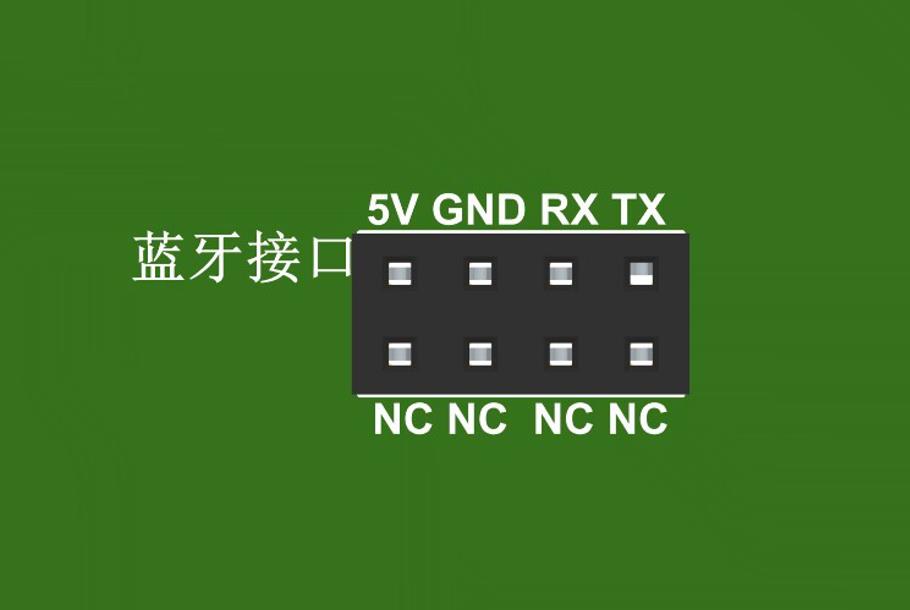
▲ 图9.2 辅助车模蓝牙排母接口示意图
其中,具体的通信信息格式和数据协议不做限定。
5、主控车模语音接口
主车模的语音信息获取使用串口WIFI模块,现场比赛时,为减少现场配对带来的麻烦,竞赛组委会会提前准备配对好的WIFI模块,为方便插到主车模上,请在主车模电路板上预留统一的2.54间距24排母接口,推荐用24是为了插接更稳定,接口电气顺序请参考下图,其中RTS与RST只需要连接到普通IO即可,图片中的串口的引脚定义已经进行了交叉,因此RX连接到单片机RX,TX连接到单片机的TX即可。
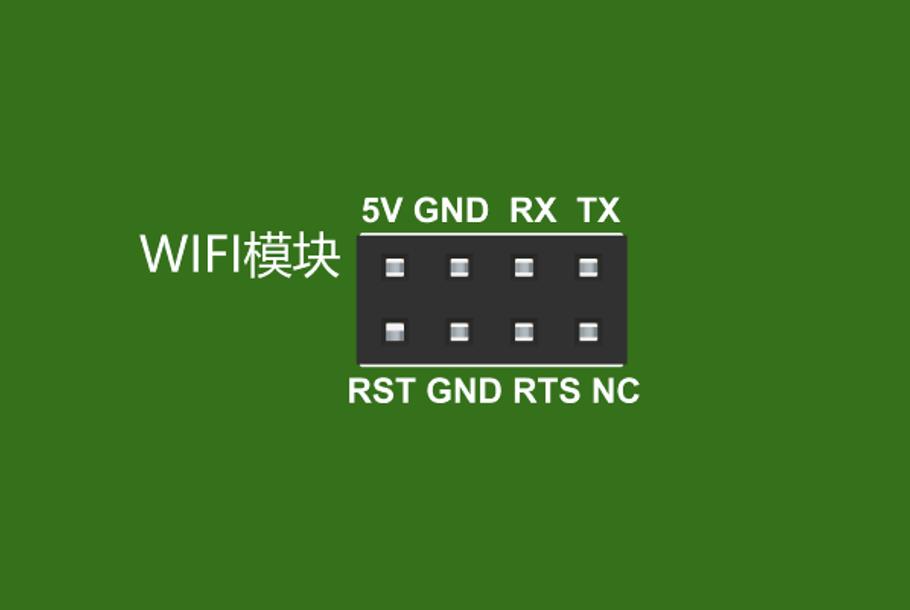
▲ 图9.3 主控车模串口WiFi 模块排母接口示意图
语音信息会按照如下格式下发:
| 名称 | 定义 |
|---|---|
| 帧头 | 0xA5A5(两个字节) |
| 预留 | 0x0000(两个字节) |
| 数据包长度 | 0x???? (四个字节) |
| 语音数据 | 发送所有的语音数据 |
■ 相关文献链接:
● 相关图表链接:
- 图1.1 车库尺寸示意图
- 图3.1 无框目标板示意图
- 图4.1 预赛搬运要求
- 图4.2 决赛搬运要求
- 图6.1 通讯模块
- 图9.1 无线通讯模块结构示意图
- 图9.2 辅助车模蓝牙排母接口示意图
- 图9.3 主控车模串口WiFi 模块排母接口示意图
以上是关于第十八届全国大学生智能汽车竞赛 智能视觉组比赛细则补充规定的主要内容,如果未能解决你的问题,请参考以下文章