-BASIC DETECTOR .3
Posted zhangrelay
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了-BASIC DETECTOR .3相关的知识,希望对你有一定的参考价值。
书中程序适用于turtlebot、husky等多种机器人,配置相似都可以用的。
支持ROS2版本foxy、humble。
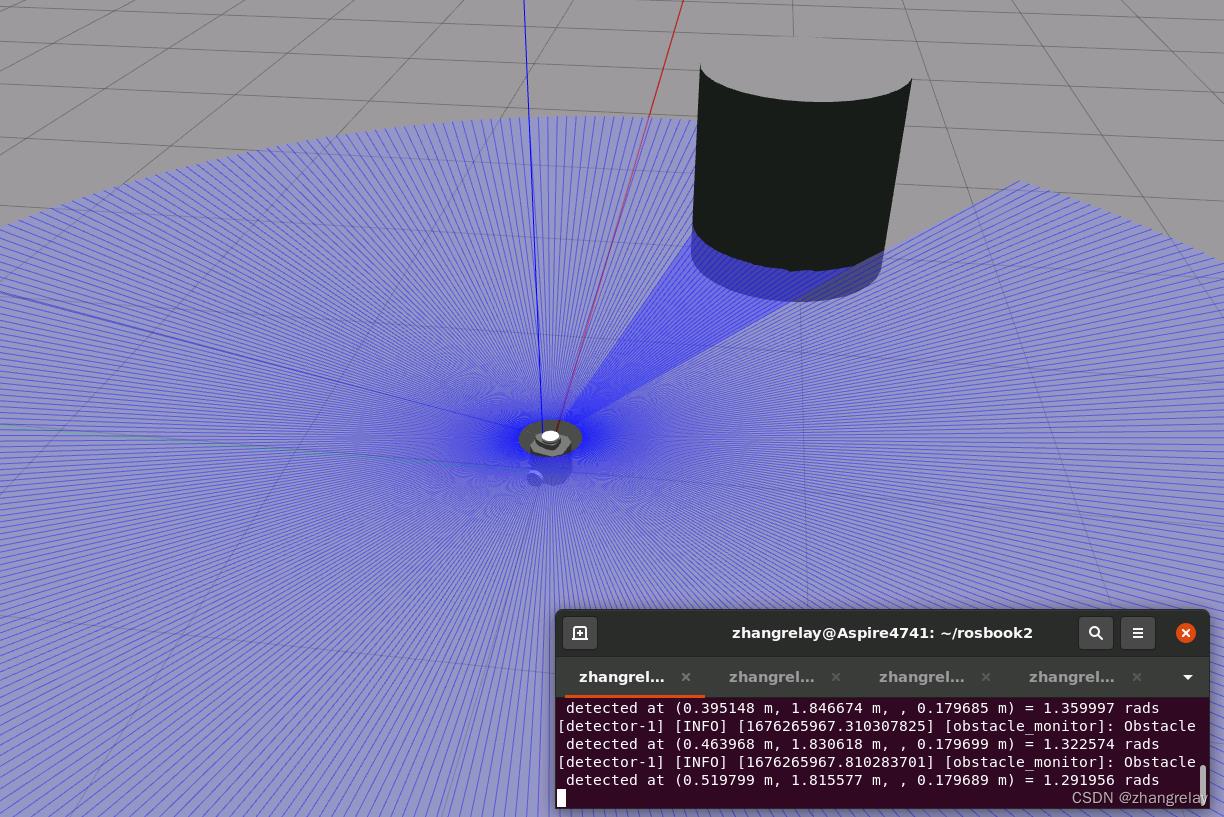
基础检测效果如下:
由于缺¥,所有设备都非常老旧,都是其他实验室淘汰或者拼凑出来的设备。机器人控制笔记本是2010年版本。
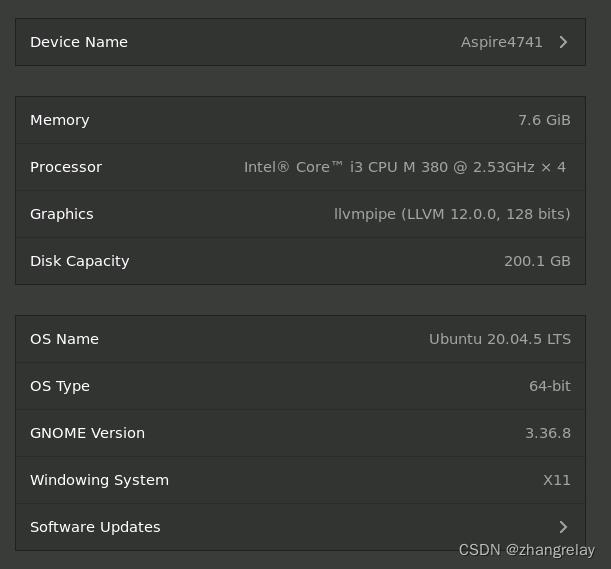
但是依然可以跑ROS1、ROS2。
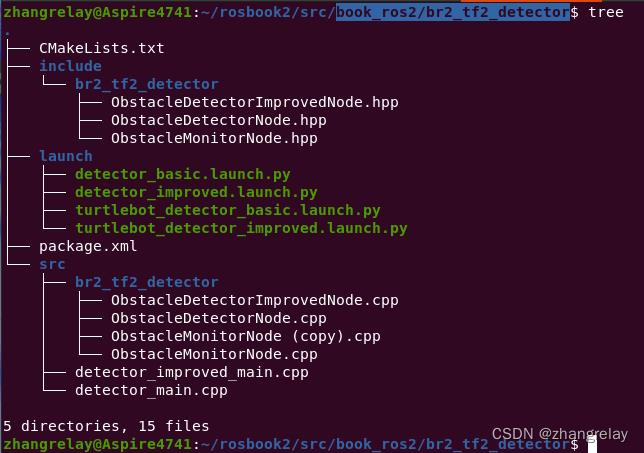
book_ros2/br2_tf2_detector目录:
.
├── CMakeLists.txt
├── include
│ └── br2_tf2_detector
│ ├── ObstacleDetectorImprovedNode.hpp
│ ├── ObstacleDetectorNode.hpp
│ └── ObstacleMonitorNode.hpp
├── launch
│ ├── detector_basic.launch.py
│ ├── detector_improved.launch.py
│ ├── turtlebot_detector_basic.launch.py
│ └── turtlebot_detector_improved.launch.py
├── package.xml
└── src
├── br2_tf2_detector
│ ├── ObstacleDetectorImprovedNode.cpp
│ ├── ObstacleDetectorNode.cpp
│ ├── ObstacleMonitorNode (copy).cpp
│ └── ObstacleMonitorNode.cpp
├── detector_improved_main.cpp
└── detector_main.cpp
5 directories, 15 files
里面有两个部分basic和improved。
CMakelist(lib):
cmake_minimum_required(VERSION 3.5)
project(br2_tf2_detector)
set(CMAKE_CXX_STANDARD 17)
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(visualization_msgs REQUIRED)
set(dependencies
rclcpp
tf2_ros
geometry_msgs
sensor_msgs
visualization_msgs
)
include_directories(include)
add_library($PROJECT_NAME SHARED
src/br2_tf2_detector/ObstacleDetectorNode.cpp
src/br2_tf2_detector/ObstacleMonitorNode.cpp
src/br2_tf2_detector/ObstacleDetectorImprovedNode.cpp
)
ament_target_dependencies($PROJECT_NAME $dependencies)
add_executable(detector src/detector_main.cpp)
ament_target_dependencies(detector $dependencies)
target_link_libraries(detector $PROJECT_NAME)
add_executable(detector_improved src/detector_improved_main.cpp)
ament_target_dependencies(detector_improved $dependencies)
target_link_libraries(detector_improved $PROJECT_NAME)
install(TARGETS
$PROJECT_NAME
detector
detector_improved
ARCHIVE DESTINATION lib
LIBRARY DESTINATION lib
RUNTIME DESTINATION lib/$PROJECT_NAME
)
install(DIRECTORY launch DESTINATION share/$PROJECT_NAME)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()障碍物识别节点
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <memory>
#include "br2_tf2_detector/ObstacleDetectorNode.hpp"
#include "sensor_msgs/msg/laser_scan.hpp"
#include "geometry_msgs/msg/transform_stamped.hpp"
#include "rclcpp/rclcpp.hpp"
namespace br2_tf2_detector
using std::placeholders::_1;
ObstacleDetectorNode::ObstacleDetectorNode()
: Node("obstacle_detector")
scan_sub_ = create_subscription<sensor_msgs::msg::LaserScan>(
"input_scan", rclcpp::SensorDataQoS(),
std::bind(&ObstacleDetectorNode::scan_callback, this, _1));
tf_broadcaster_ = std::make_shared<tf2_ros::StaticTransformBroadcaster>(*this);
void
ObstacleDetectorNode::scan_callback(sensor_msgs::msg::LaserScan::UniquePtr msg)
double dist = msg->ranges[msg->ranges.size() / 2];
if (!std::isinf(dist))
geometry_msgs::msg::TransformStamped detection_tf;
detection_tf.header = msg->header;
detection_tf.child_frame_id = "detected_obstacle";
detection_tf.transform.translation.x = msg->ranges[msg->ranges.size() / 2];
tf_broadcaster_->sendTransform(detection_tf);
// namespace br2_tf2_detector主要就是回调函数完成大部分功能。具体参考源代码即可。
障碍物监控节点:
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <tf2/transform_datatypes.h>
#include <tf2/LinearMath/Quaternion.h>
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>
#include <memory>
#include "br2_tf2_detector/ObstacleMonitorNode.hpp"
#include "geometry_msgs/msg/transform_stamped.hpp"
#include "rclcpp/rclcpp.hpp"
namespace br2_tf2_detector
using namespace std::chrono_literals;
ObstacleMonitorNode::ObstacleMonitorNode()
: Node("obstacle_monitor"),
tf_buffer_(),
tf_listener_(tf_buffer_)
marker_pub_ = create_publisher<visualization_msgs::msg::Marker>("obstacle_marker", 1);
timer_ = create_wall_timer(
500ms, std::bind(&ObstacleMonitorNode::control_cycle, this));
void
ObstacleMonitorNode::control_cycle()
geometry_msgs::msg::TransformStamped robot2obstacle;
try
robot2obstacle = tf_buffer_.lookupTransform(
"odom", "detected_obstacle", tf2::TimePointZero);
catch (tf2::TransformException & ex)
RCLCPP_WARN(get_logger(), "Obstacle transform not found: %s", ex.what());
return;
double x = robot2obstacle.transform.translation.x;
double y = robot2obstacle.transform.translation.y;
double z = robot2obstacle.transform.translation.z;
double theta = atan2(y, x);
RCLCPP_INFO(
get_logger(), "Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads",
x, y, z, theta);
visualization_msgs::msg::Marker obstacle_arrow;
obstacle_arrow.header.frame_id = "odom";
obstacle_arrow.header.stamp = now();
obstacle_arrow.type = visualization_msgs::msg::Marker::ARROW;
obstacle_arrow.action = visualization_msgs::msg::Marker::ADD;
obstacle_arrow.lifetime = rclcpp::Duration(1s);
geometry_msgs::msg::Point start;
start.x = 0.0;
start.y = 0.0;
start.z = 0.0;
geometry_msgs::msg::Point end;
end.x = x;
end.y = y;
end.z = z;
obstacle_arrow.points = start, end;
obstacle_arrow.color.r = 1.0;
obstacle_arrow.color.g = 0.0;
obstacle_arrow.color.b = 0.0;
obstacle_arrow.color.a = 1.0;
obstacle_arrow.scale.x = 0.02;
obstacle_arrow.scale.y = 0.1;
obstacle_arrow.scale.z = 0.1;
marker_pub_->publish(obstacle_arrow);
// namespace br2_tf2_detector代码和原始版本稍微有些不同。
重要部分:
try
robot2obstacle = tf_buffer_.lookupTransform(
"odom", "detected_obstacle", tf2::TimePointZero);
catch (tf2::TransformException & ex)
RCLCPP_WARN(get_logger(), "Obstacle transform not found: %s", ex.what());
return;
double x = robot2obstacle.transform.translation.x;
double y = robot2obstacle.transform.translation.y;
double z = robot2obstacle.transform.translation.z;
double theta = atan2(y, x);
RCLCPP_INFO(
get_logger(), "Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads",
x, y, z, theta);如果tf不能正常工作,会报错Obstacle transform not found:
例如odom没有
[detector-1] [WARN] [1676266943.177279939] [obstacle_monitor]: Obstacle transform not found: "odom" passed to lookupTransform argument target_frame does not exist.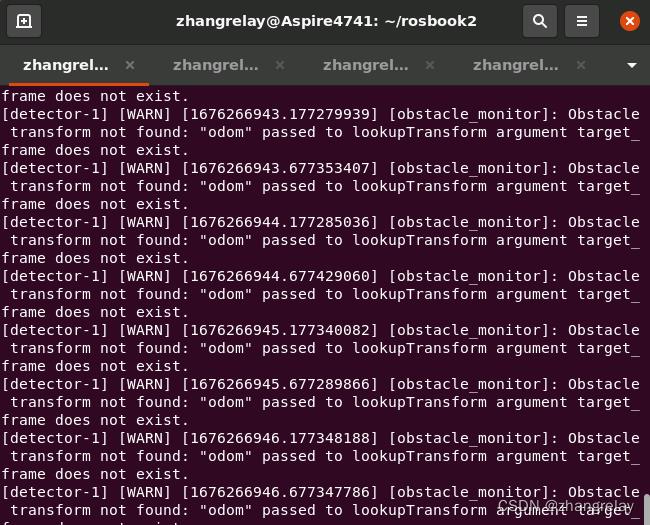
例如detected_obstacle没有
[detector-1] [WARN] [1676267019.166991316] [obstacle_monitor]: Obstacle transform not found: "detected_obstacle" passed to lookupTransform argument source_frame does not exist. 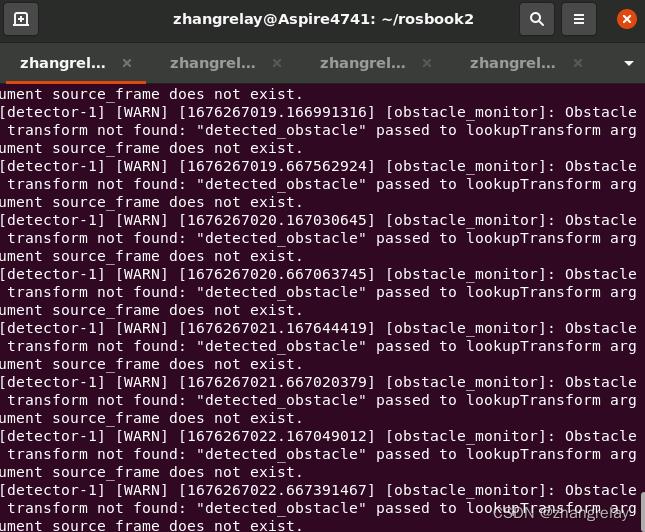
需要思考并解决问题哦^_^
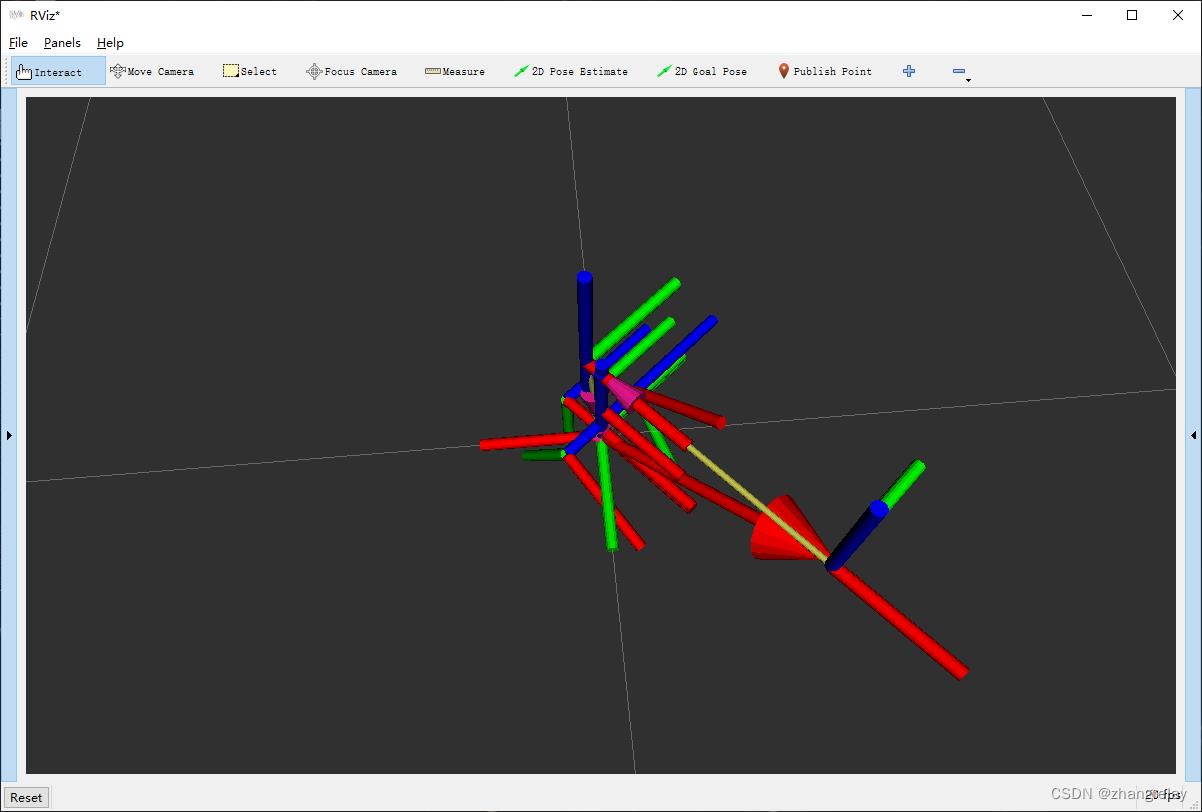
如果都ok!那么"Obstacle detected at (%lf m, %lf m, , %lf m) = %lf rads":
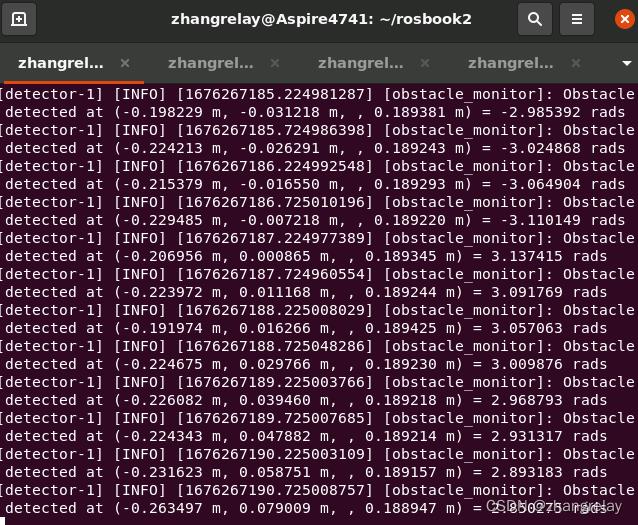
机器人在运动中所以角度和距离会不断变化。
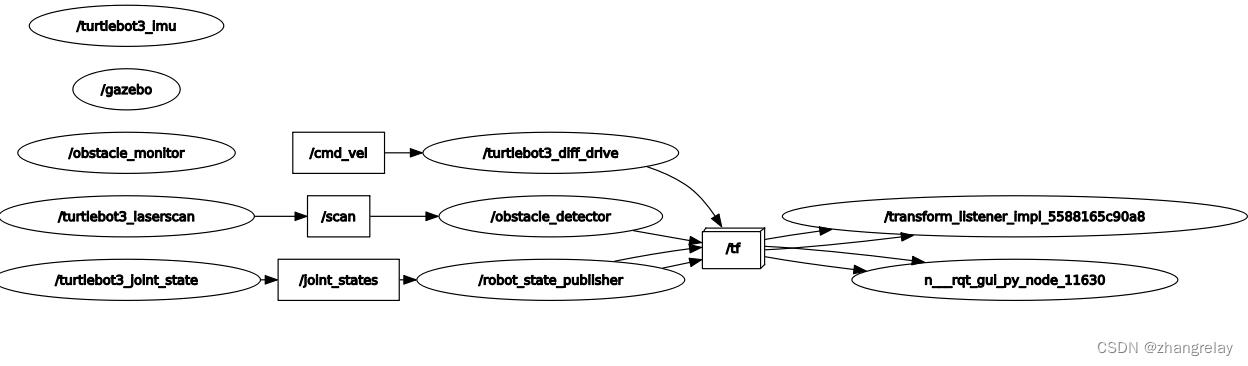
此时如果查看:
rqt
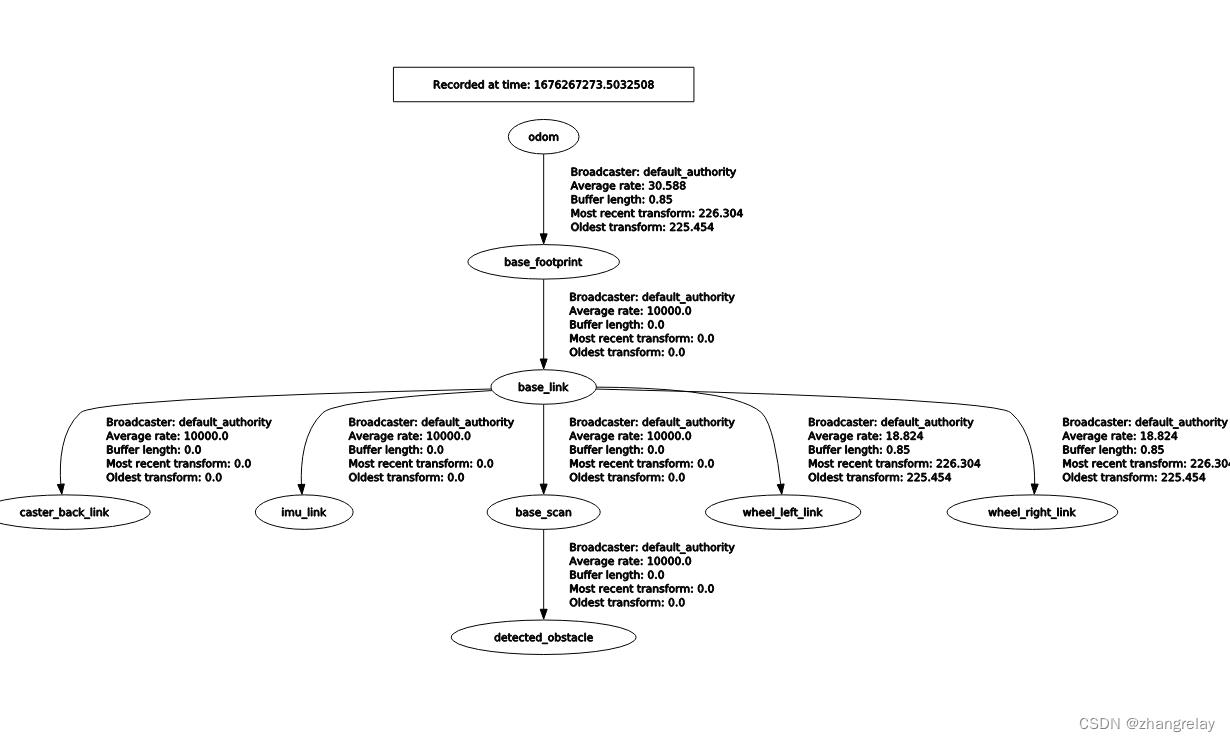
其中检测tf是由激光传感器测距给出的。
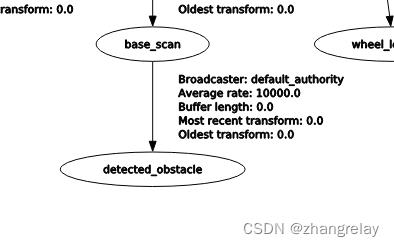
节点主题图:
这个代码主程序!
// Copyright 2021 Intelligent Robotics Lab
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <memory>
#include "br2_tf2_detector/ObstacleDetectorNode.hpp"
#include "br2_tf2_detector/ObstacleMonitorNode.hpp"
#include "rclcpp/rclcpp.hpp"
int main(int argc, char * argv[])
rclcpp::init(argc, argv);
auto obstacle_detector = std::make_shared<br2_tf2_detector::ObstacleDetectorNode>();
auto obstacle_monitor = std::make_shared<br2_tf2_detector::ObstacleMonitorNode>();
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(obstacle_detector->get_node_base_interface());
executor.add_node(obstacle_monitor->get_node_base_interface());
executor.spin();
rclcpp::shutdown();
return 0;
这里需要注意!
rclcpp::executors::SingleThreadedExecutor executor;
executor.add_node(obstacle_detector->get_node_base_interface());
executor.add_node(obstacle_monitor->get_node_base_interface());如果C++掌握一般推荐看一看:
多线程是如何实现的。
整个程序要跑起来:
终端1-gazebo仿真:ros2 launch turtlebot3_gazebo empty_world.launch.py
ros2 launch turtlebot3_gazebo empty_world.launch.py
[INFO] [launch]: All log files can be found below /home/zhangrelay/.ros/log/2023-02-13-13-43-10-244500-Aspire4741-10860
[INFO] [launch]: Default logging verbosity is set to INFO
urdf_file_name : turtlebot3_burger.urdf
[INFO] [gzserver-1]: process started with pid [10862]
[INFO] [gzclient -2]: process started with pid [10864]
[INFO] [ros2-3]: process started with pid [10868]
[INFO] [robot_state_publisher-4]: process started with pid [10870]
[robot_state_publisher-4] [WARN] [1676266991.467830827] [robot_state_publisher]: No robot_description parameter, but command-line argument available. Assuming argument is name of URDF file. This backwards compatibility fallback will be removed in the future.
[robot_state_publisher-4] Parsing robot urdf xml string.
[robot_state_publisher-4] Link base_link had 5 children
[robot_state_publisher-4] Link caster_back_link had 0 children
[robot_state_publisher-4] Link imu_link had 0 children
[robot_state_publisher-4] Link base_scan had 0 children
[robot_state_publisher-4] Link wheel_left_link had 0 children
[robot_state_publisher-4] Link wheel_right_link had 0 children
[robot_state_publisher-4] [INFO] [1676266991.472337172] [robot_state_publisher]: got segment base_footprint
[robot_state_publisher-4] [INFO] [1676266991.472419811] [robot_state_publisher]: got segment base_link
[robot_state_publisher-4] [INFO] [1676266991.472444636] [robot_state_publisher]: got segment base_scan
[robot_state_publisher-4] [INFO] [1676266991.472465018] [robot_state_publisher]: got segment caster_back_link
[robot_state_publisher-4] [INFO] [1676266991.472485972] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-4] [INFO] [1676266991.472505808] [robot_state_publisher]: got segment wheel_left_link
[robot_state_publisher-4] [INFO] [1676266991.472525491] [robot_state_publisher]: got segment wheel_right_link
[ros2-3] Set parameter successful
[INFO] [ros2-3]: process has finished cleanly [pid 10868]
[gzserver-1] [INFO] [1676266994.292818234] [turtlebot3_imu]: <initial_orientation_as_reference> is unset, using default value of false to comply with REP 145 (world as orientation reference)
[gzserver-1] [INFO] [1676266994.417396256] [turtlebot3_diff_drive]: Wheel pair 1 separation set to [0.160000m]
[gzserver-1] [INFO] [1676266994.417528534] [turtlebot3_diff_drive]: Wheel pair 1 diameter set to [0.066000m]
[gzserver-1] [INFO] [1676266994.420616206] [turtlebot3_diff_drive]: Subscribed to [/cmd_vel]
[gzserver-1] [INFO] [1676266994.425994254] [turtlebot3_diff_drive]: Advertise odometry on [/odom]
[gzserver-1] [INFO] [1676266994.428920116] [turtlebot3_diff_drive]: Publishing odom transforms between [odom] and [base_footprint]
[gzserver-1] [INFO] [1676266994.460852885] [turtlebot3_joint_state]: Going to publish joint [wheel_left_joint]
[gzserver-1] [INFO] [1676266994.461009035] [turtlebot3_joint_state]: Going to publish joint [wheel_right_joint]
终端2-障碍物检测:
ros2 launch br2_tf2_detector turtlebot_detector_basic.launch.py
终端3-rqt:rqt
终端4-rviz2:rviz2
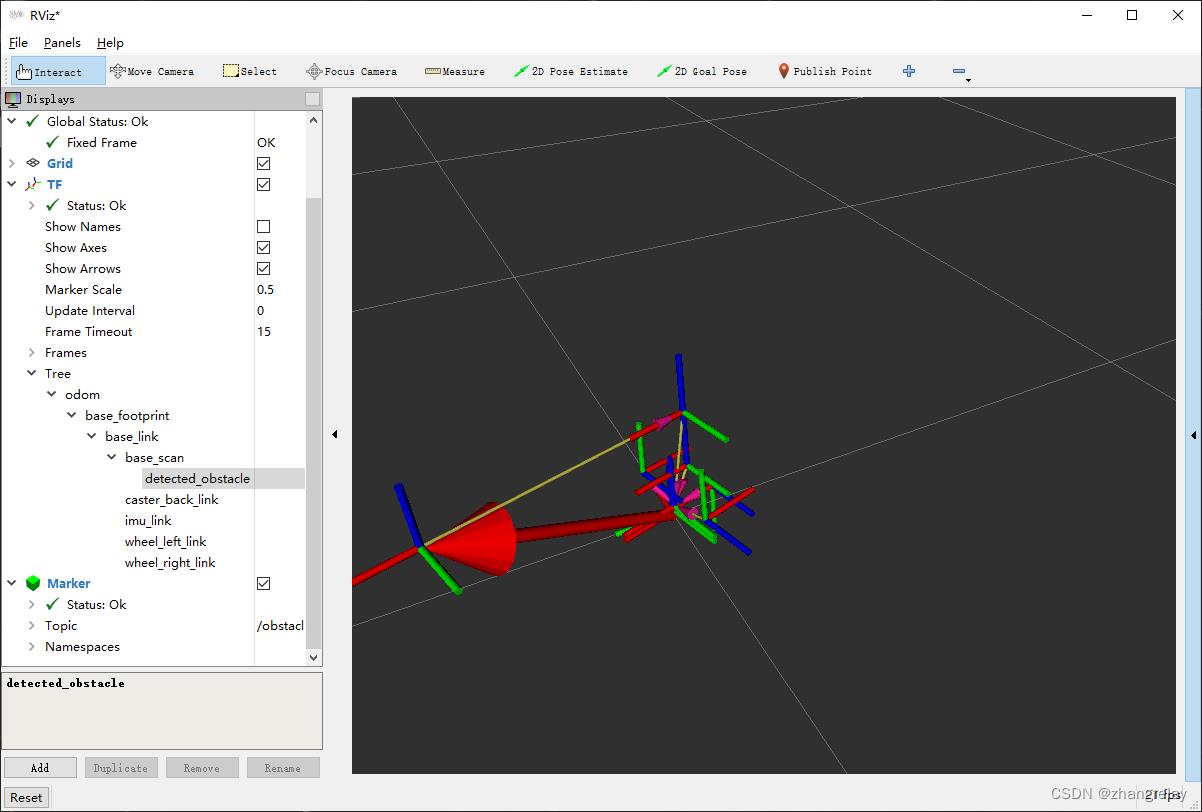
windows端也可以获取信息。
补充:
四元数是方向的4元组表示,它比旋转矩阵更简洁。四元数对于分析涉及三维旋转的情况非常有效。四元数广泛应用于机器人、量子力学、计算机视觉和3D动画。
可以在维基百科上了解更多关于基础数学概念的信息。还可以观看一个可探索的视频系列,将3blue1brown制作的四元数可视化。
官方教程将指导完成调试典型tf2问题的步骤。它还将使用许多tf2调试工具,如tf2_echo、tf2_monitor和view_frames。
TF2完整教程提纲:
tf2
许多tf2教程都适用于C++和Python。这些教程经过简化,可以完成C++曲目或Python曲目。如果想同时学习C++和Python,应该学习一次C++教程和一次Python教程。
目录
工作区设置
学习tf2
调试tf2
将传感器消息与tf2一起使用
工作区设置
如果尚未创建完成教程的工作空间,请遵循本教程。
学习tf2
tf2简介。
本教程将让了解tf2可以为您做什么。它在一个多机器人的例子中展示了一些tf2的力量,该例子使用了turtlesim。这还介绍了使用tf2_echo、view_frames和rviz。
编写静态广播(Python)(C++)。
本教程教如何向tf2广播静态坐标帧。
编写广播(Python)(C++)。
本教程教如何向tf2广播机器人的状态。
编写监听器(Python)(C++)。
本教程教如何使用tf2访问帧变换。
添加框架(Python)(C++)。
本教程教如何向tf2添加额外的固定帧。
使用时间(Python)(C++)。
本教程教使用lookup_transform函数中的超时来等待tf2树上的转换可用。
时间旅行(Python)(C++)。
本教程向介绍tf2的高级时间旅行功能。
调试tf2
四元数基本原理。
本教程介绍ROS 2中四元数的基本用法。
调试tf2问题。
本教程向介绍调试tf2相关问题的系统方法。
将传感器消息与tf2一起使用
对tf2_ros::MessageFilter使用标记数据类型。
本教程教您如何使用tf2_ros::MessageFilter处理标记的数据类型。
以上是关于-BASIC DETECTOR .3的主要内容,如果未能解决你的问题,请参考以下文章